(54) УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ШАРИКОПОДШИПНИКОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для диагностики шарикоподшипников | 1977 |
|
SU746235A1 |
| Устройство для диагностики шарикоподшипников | 1978 |
|
SU721696A1 |
| Устройство для диагностики шарикоподшипников электродвигателя | 1983 |
|
SU1177711A1 |
| Устройство для диагностики подшипниковых узлов механических систем | 1982 |
|
SU1021947A1 |
| Устройство для диагностики подшипников качения | 1977 |
|
SU635404A1 |
| "Устройство для диагностики шарикоподшипников | 1976 |
|
SU659923A1 |
| Устройство для диагностики подшипников качения | 1977 |
|
SU696330A1 |
| Устройство для диагностики механизмов с вращающимися элементами | 1983 |
|
SU1174815A1 |
| Устройство для диагностики подшипников качения | 1975 |
|
SU540186A1 |
| Устройство для диагностики опорМЕХАНизМОВ | 1979 |
|
SU845017A1 |
1
Изобретение относится к общему машиностроению и может быть использовано преимущественно в , подшипниковой промышленности.
По основному авт. св. № 746235 известно устройство для диагностики шарикоподщипников, содержащее последовательно соединенные вибропреобразователь и усилитель, первый частотный анализатор и первую ключевую схему, второй частотный анализатор и вторую ключевую схему, блок деления, блок умножения, третью ключевую схему и блок накопления и осреднения, блок совпадения, коммутатор, шаговый двигатель с программным управлением и функциональный преобразователь, а также первый блок управления, блок ИЛИ, цифровой указатель-преобразователь. Выход усилителя соединен с первыми входами первого и второго частотных анализаторов, вторые входы которых соединены со вторыми и третьим выходами щагoвoгo двигателя с программным управлением. Выходы первого и второго частотных анализаторов соединены с первым и вторым входами блока совпадения. Второй выход коммутатора соединен со вторыми входами первой и второй ключевых
схем, выходы которых соединены с первым и вторым входами блока деления. Выход функционального преобразователя соединен со вторым входом блока умножения, выход которого соединен со входами первого и второго пороговых устройств, первые выходы которых через блок ИЛИ соединены со вторым входом коммутатора, а вторые выходы через первый блок управления со вторым входом третьей ключевой схемы. Первый выход блока накопления и осреднения соединен с третьим входом коммутатора 1.
Недостаток этого устройства заключается в том, что оно дает невысокое качество диагностики, так как не позволяет осуществить диагностику ожидаемого значения дефекта шарикоподшипника в заданный момент времени.
Цель изобретения - диагностика ожидаемого значения дефекта шарикоподшипника в заданный момент времени и, как следствие, повышение качества диагностики.
Поставленная цель достигается тем, что устройство снабжено последовательно соединенными инвертором, вход которого соединен со вторым выходом блока накопления и осреднения, модулято1эом, первым сумматором, степенным преобразователем, блоком переменного усиления, интегратором, а также первой, второй,третьей схемами умножения, входы которых соединены с выходом усилителя, а выходы со вторым, третьим, четвертым входами первого.сумматора, генератором звуковых колебаний, выход которого соединен со входом модулятора, вторым сумматором, выход которого соединен со входом цифрового указателя-преобразователя, а первый и второй входы со вторым выходом блока накопления и осреднения и выходом интегратора, схемой сравнения, вторым блоком управления, вход которого соединен с выходом схемы сравнения, выход со вторым входом блока переменного усиления, режимным переключателем, первый выход которого соединен с четвертым входом коммутатора, второй выход со вторым входом интегратора, третий выход с первым входом схемы сравнения, второй и третий входы которой соединены со вторым выходом блока накопления и осреднения и выходом интегратора.
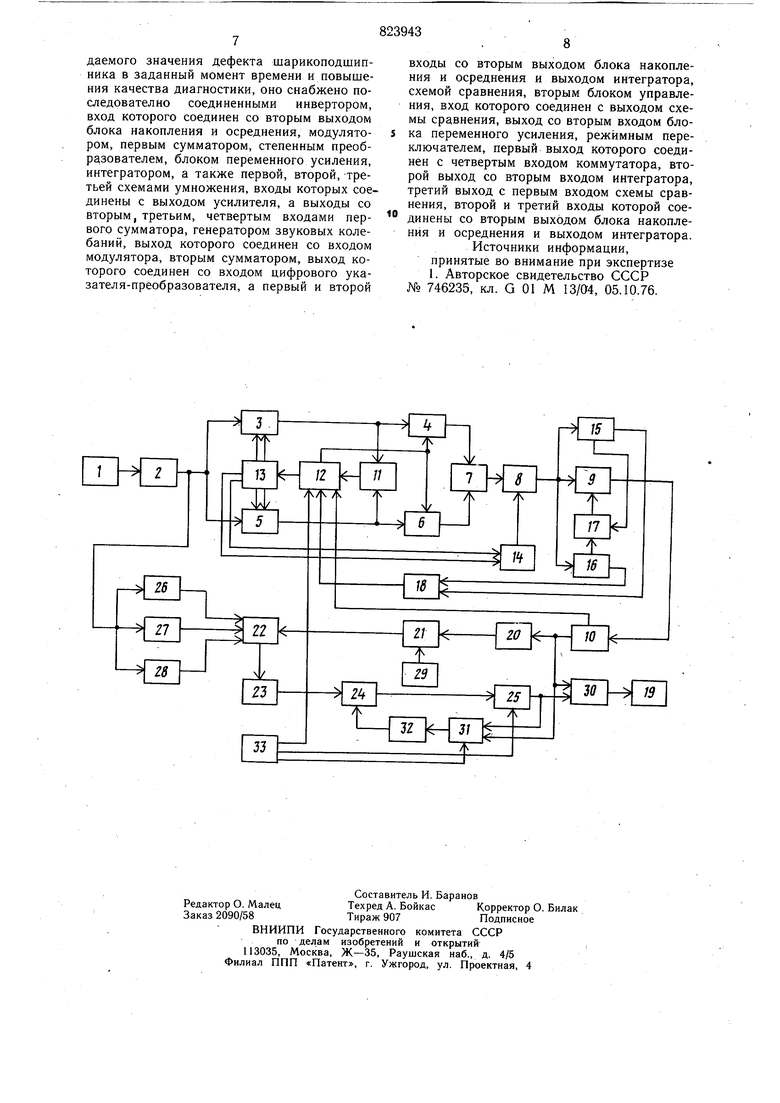
На чертеже схематически изображено предлагаемое устройство.
Устройство для диагностики шарикоподшипников содержит последовательно соединенный вибропреобразователь 1 и усилитель 2, первый частотный анализатор 3 и первую ключевую схему 4, второй частотный анализатор 5 и вторую ключевую схему 6, блок 7 деления, блок 8 умножения, третью ключевую схему 9 и блок 10 накопления и осреднения, блок 11 совпадения, коммутатор 12, шаговый двигатель 13 с программным управлением и функциональный преобразователь 14, а также первый и второй пороговые блоки 15 и 16, первый блок 17 управления, блок ИЛИ 18, цифровой указатель-преобразователь 19. Выход усилителя 2 соединен с первыми входами первого и второго частотных анализаторов 3 и 5, вторые входы которых соединены со вторым и третьим выходами шагового двигателя с программным управлением 13. Выходы первого и второго частотных анализаторов 3 и 5 соединены с первым и вторым входами блока 11 совпадения. Второй выход коммутатора 12 соединен со вторыми входами первой и второй ключевых схем 4 и 6, выходы которых соединены с первым и вторым входами блока 7 деления. Выхо функционального преобразователя 14 соединен со вторым входом блока 8 умножения, выход которого соединен со входами первого и второго пороговых устройств 15 и 16, первые выходы которых через блок ИЛИ 18 соединены со вторым входом коммутатора 12, а вторые выходы через первый блок 17 управления со вторым входом третьей ключевой схемы 9. Первый выход блока 10 накопления и осреднения соединен с третьим входом коммутатора 12.
Устройство снабжено также последовательно соединенными инвертором 20, вход которого соединен со вторым выходом блока 10 накопления и осреднения, модулятором 21, первым сумматором 22, преобразователем 23, блоком 24 переменного усиления, интегратором 25, а также первой 26, второй 27, третьей 28 схемами умножения, входы которых соединены с выходом усилителя 2, а выходы со вторым, третьим, четвертым входами первого сумматора 22, генератором 29 звуковых колебаний, выход которого соединен со входом модулятора 21, вторым сумматором 30, выход которого соединен со входом цифрового указателя-преобразователя 19, а первый и второй входы со вторым выходом блока 10 накопления и осреднения и выходом интегратора 25, схемой 31 сравнения, вторым блоком 32 управления, вход которого соединен с выходом схемы 31 сравнения, выход со вторым входом блока 24 переменного усиления, режимным переключателем 33, первый выход которого соединен с четвертым входом коммутатора, второй выход со вторым входом интегратора, третий выход с первым входом схемы 31 сравнения, второй и третий входы которой соединены со вторым выходом блока 10 накопления и осреднения и выходом интегратора 25.
Устройство для диагностики шарикоподшипников работает .следующим образом.
Механическая вибрация объекта исследования преобразуется вибропреобразователем 1 в электрический сигнал, который усиливается усилителем 2. Сигнал с выхода усилителя 2 подается на входы частотных анализаторов 3 и 5. Настройка и перестройка анализаторов 3 и 5 осуществляется с помощью шагового двигателя 13, который управляется сигналом с первого коммутатора 12. Сигналы с выходов частотных анализаторов 3 и 5 поступают на входы блока 11 совпадения и одновременно на входы первой и второй ключевых схем 4 и 6. При наличии сигналов на двух входах блока 11 совпадения подается сигнал на первый вход первого коммутатора 12. На четвертый вход коммутатора 12 поступает сигнал с выхода режимного переключателя 33. При наличии сигналов на первом и четвертом входах коммутатора 12, коммутатор 12 отключает питание шагового двигателя 13, подает коммутирующее напряжение на управляющие входы первой и второй ключевых схем 4 и 6, которые пропускают при этом сигналы с выходов частотных анализаторов 3 и 5 на блок 7 деления. Сигнал с выхода блока 7 деления поступает на первый вход блока 8 умножения. На второй вход блока 8.умножения поступает сигнал с функционального преобразователя 14, работой которого управляет шаговый двигатель 13. Сигнал с блока 8 умножения поступает на входы пороговых блоков 15 и 16 и вход третьей ключевой схемы 9. Если величина сигнала лежит в диапазоне, ограниченном порогами настройки пороговых блоков 15 и 16, то ни один из пороговых блоков не срабатывает. В этом случае с управляющих выходов пороговых блоков 15 и 16 поступают сигналы на входы первого блока 17 управления, который открывает третью ключевую cxe&iy 9. Сигнал с выхода блока 8 умножения через третью ключевую схему 9 поступает на вход блока 10 накопления и осреднения. В случае, если величина сигнала на выходе блока 8 умножения не укладывается в диапазон между порогами, на которые настроены пороговые блоки 15 и 16, один из пороговых блоков срабатывает и на его втором выходе появляется сигнал, который поступает на один из входов схемы ИЛИ 18. При этом третья ключевая схема 9 закрыта. Сигнал с выхода схемы ИЛИ 18 поступает на второй вход коммутатора 12, который снимает коммутирующее напряжение с управляющих входов первой и второй ключевых схем 4, 6, и подключает питание к шаговому двигателю 13. Процесс диагностики продолжается до следующего совпадения сигналов от частотных анализаторов 3 и 5 на блоке 11 совпадения. Сигнал на выходе блока 10 накопления и осреднения пропорционален величине дефекта диагностируемого подшипника. Сигнал с выхода блока 10 накопления и осреднения поступает на вход коммутатора 12 для подключения питания шагового двигателя 13 и продолжения анализа, а также на вход инвертора 20. Сигнал с выхода инвертора 20 поступает на первый вход модулятора 21, на второй вход которого поступает синусоидальный сигнал с генератора звуковых сигналов. Сигнал с выхода модулятора 21 поступает на вход второго сумматора 22. Другие три входа сумматора 22 соединены через схемы 26-28 умножения с выходом усилителя 2. Коэффициенты схем умножения 26-28 выбираются в зависимости от конструктивных параметров объекта исследования. Сигнал с выхода первого сумматора 22 поступает на вход степенного преобразователя 23, где подвергается операции воздействия в степень 3/2. Сигнал на выходе степенного преобразователя 23 пропорционален динамической нагрузке на подшипник. Этот сигнал поступает на вход блока 24 переменного усиления. Коэффициент усиления блока 24 определяется интенсивностью износа подшипника.
С выхода блока 24 переменного усиления сигнал поступает на вход интегратора 25. Предел интегрирования сигнала задается в зависимости от того, в какой момент времени в будущем надо определить величину дефекта шарикоподшипника с помощью режимного переключателя 33, сигнал с которого подается на второй вход интегратора 25. Сигнал на выходе интегратора 25 пропорционален изменению величины дефекта за отрезок времени от настоящего момента до интересующего нас будущего момента времени. Для определения абсолютной величины дефекта шарикоподшипника в схему введен второй сумматор 30. На один из входов сумматора 30 подается , сигнал с интегратора 25, на второй - сигнал с выхода блока 10 накопления и осреднения, пропорциональный величине дефекта шарикоподшипника в настоящий момент затем этот сигнал подается на цифровой указатель-преобразователь 19. Для повышения точности в устройство введена цепочка обратной связи, состоящая из схемы
31 сравнения и второго блока 32 управления, дающая возможность самообучения устройства.
При работе установки в режиме самообучения со второго выхода режимного переключателя 33 на вход интегратора 25 поступает управляющий сигнал. При этом с выхода интегратора 25 снимается постоянный сигнал, который был при первоначальном режиме работы и подается на первый вход схемы сравнения. Диагностическая ус тановка продолжает работу до заданного момента времени. При этом сигнал о текущей величине дефекта поступает на второй вход схемы 31 сравнения, с выхода блока 10 накопления и осреднения. При достиже0 НИИ заданного момента времени сигнал с режимного переключателя 33 закрывает коммутатор 12, одновременно открывается схема 31 сравнения. При отличии сигналов на первом и втором входе схемы 31 сравнения на выходе схемы 31 сравнения появляется
i сигнал, который поступает на вход второго блока 32 управления. Сигнал с выхода блока 32 управления поступает на второй вход блока 24 переменного усиления. При этом происходит подстройка коэффициента
д усиления блока 24, пропорционального интенсивности износа.
Измерение дефекта шарикоподшипника проводится в рабочих условиях для объектов имеющих вращающийся вал в шарикоподшипниковых опорах. При этом диагностируется не только состояние подшипника в настоящий момент времени, но и заданный момент будущего. При этом появляется возможность также определить качество изделия, которое определяется не только состоянием изделия в начальный момент времени, но и способностью сохранять свои характеристики во времени.
Форм1 ла изобретения
Устройство для диагностики шарикоподшипников по авт. св. JMb 746235, отличающееся тем, что, с целью диагностики ожидаемого значения дефекта шарикоподшипника в заданный момент времени и повышения качества диагностики, оно снабжено последователно соединенными инвертором, вход которого соединен со вторым выходом блока накопления и осреднения, модулятором, первым сумматором, степенным преобр зователем, блоком переменного усиления, интегратором, а также первой, второй, третьей схемами умножения, входы которых соединены с выходом усилителя, а выходы со вторым, третьим, четвертым входами первого сумматора, генератором звуковых колебаний, выход которого соединен со входом модулятора, вторым сумматором, выход которого соединен со входом цифрового ука зателя-преобразователя, а первый и второй
входы со вторым выходом блока накопления и осреднения и выходом интегратора, схемой сравнения, вторым блоком управления, вход которого соединен с выходом схемы сравнения, выход со вторым входом блока переменного усиления, режимным переключателем, первый выход которого соединен с четвертым входом коммутатора, второй выход со вторым входом интегратора, третий выход с первым входом схемы сравнения, второй и третий входы которой соединены со вторым выходом блока накопления и осреднения и выходом интегратора.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 746235, кл. G 01 М 13/04, 05.10.76.
