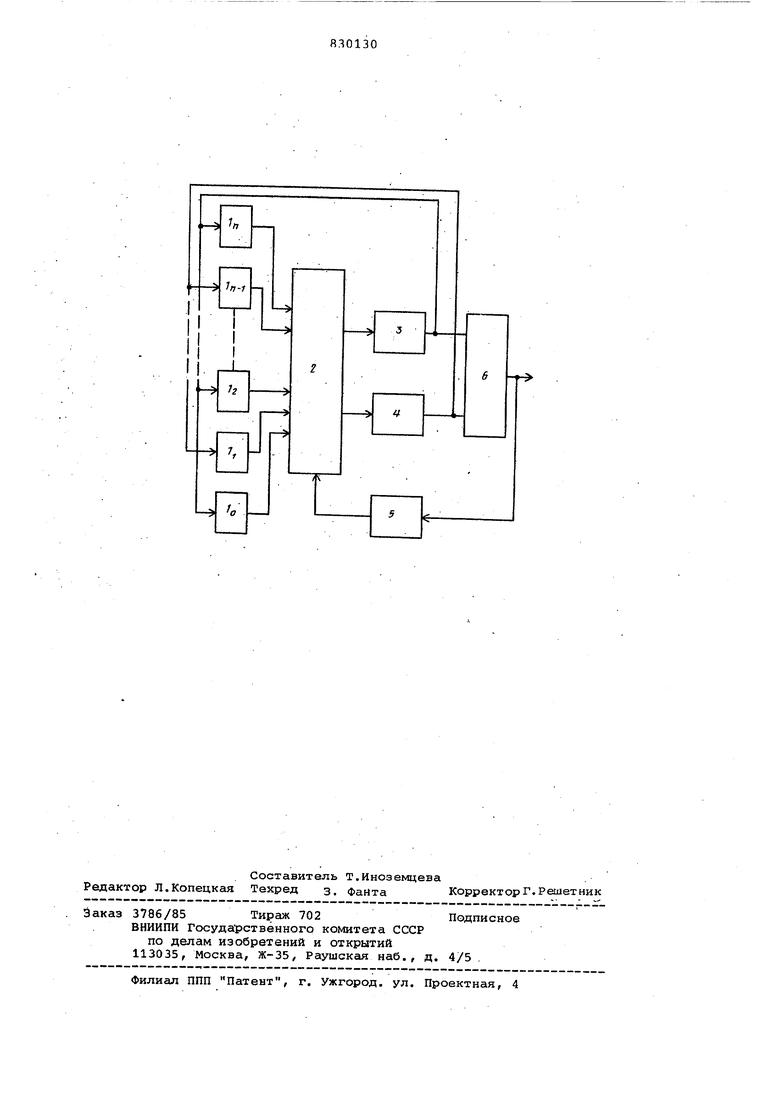
Изобретение относится к- измерению уровня диэлектрических сред с. помощью резонансных устройств и может быть использовано в криогенной, нефтехимической и других отраслях промышленности. Известны двухканальные резонансные уровнемеры, включающие два гене ратора высокой частрты, два первичн преобразовтеля, длина которых равна диапазону измерения, делители часто ты, вычислительное устройство 1. Однако эти уровнемеры не могут быть применены для решения задач, требующих постоянной величины абсолютной погрешности измерения, не зависящей от величины диапазона, измерения (высоты емкости), Кроме того, характеристика двухканальных уровнемеров существенно нелинейна, и начальный участок диапазона имеет низкую чувствительность. Линеаризация характеристики уровнемера связана с дополнительными аппаратурным затратами и появлением дополнительных источников погрешностей. Все это затрудняет . создание высокочас тотного уровнемера с независимой от диапазона измерения абсолютной погрешностью. Наиболее близким к изобретению по технической сущности является -резонансный уровнемер, содержащий датчик , корректирующий контур, вычислительное устройство,.соединенное с выходами двух преобразователей для вьвделения информативных параметров из выходных сигналов датчиков и корректирующего контура 2. Однако данное устройство харак теризуется недостаточной точностью. Цель изобретения - повышение точности измерения уровня диэлектрических сред посредством обеспечения независимости абсолютной погрешности измерения от диапазона измерения и снижения методической погрешности изза наличия градиента диэлектрической : проницаемости среды по высоте емкости. Цель достигается тем, что уров-. немер снабжен дополнительными датчиками, количество соторых равно Е( ) - 1/ где Е(Н,„, 4) - , - целая часть числа Н - максимальное значе ° ние измеЕ яемого уровня, м; (f - приведенная относительная погрешнос измерения каждого датчика д- требуемая величина абсолютной погрешности измерения, м| установленными вертикально друг за . другом над основным датчиком, устрой ством управления, вход которого соед нен с одним из выходов вычислительно го устройства, а выход - с цепями управления коммутатора, соединяющего выходы датчиков и корректирующего контура со входами преобразователей, выход одного из которых соединен с входами основного и всех четных дополнительных датчиков, а. выход друго го соединен со входами корректирующе го контура и всех нечетных дополнительных датчиков. Кроме того нижний конец основного датчика совмещен с нулевой отметкой диапазона измерения, а длина каждого датчика равна На чертеже представлена блок-схема предлагаемого уровнемера. Уровнемер содержит п датчиков li...ln, резонансные частоты которых равны между собой, корректирующий контур IQ, настроенный на резонансную частоту пустого датчика, коммута тор 2, преобразователи 3 и 4, устрой ство 5 управления синхронизирующее работу всего уровнемера, и вычислительное устройство б, обрабатывающее преобразованные сигналы датчико по определенному алгоритму. Каждый и датчиков представляет собой отрезок неоднородной электрической длинной линии с линейной выходной характери тикой (зависимость резонансной част ты от уровня среды) .Датчики 1. .. 1 корректирующий контур l возбуждают ся одновременно выходными сигналами частотно-модулированных генераторов высокой частоты, входящих в состав преобразователей 3 и 4. При этом ко ректирующий конуур 1о и все четные датчики 1 (I - 1,2...) возбуждают ся генератором преобразователя 3, а всё нечетные датчики .f генератором преобразователя 4. Выходные сиг налы преобразователей 3 и 4 несут информацию о резонансной частоте корректирующего контура и датчиков в виде, удобном для дальнейшей обработки. В зависимости от используе мого в преобразователе способа выделения информативного параметра он может быть построен по развертывающей или следящей схемам. Уровнемер работает слёдуквдим образом. Изменение уровня среды вызывает изменение резонансной частоты частично заполненного-датчика, а изменение диэлектрической проницаемости среды - изменение резонансной частоты корректирующего контура и всех полностью заполненных датчиков. При равенстве частоты колебаний генератора, входящего в состав преобразователя 3 или 4, с резонансной частотой возбуждаемого им датчика или корректирующего контура на выходе последних выделяется видеоимпульс, который через коммутатор 2 подается на вход преобразователя, в последнем он преобразуется в вид, удобный для дальнейшей обработки в вычислительном устройстве 6. Выходным сигналом устройства 5 управления коммутатор 2 устанавливается в исходное положение, при котором ко входу преобразователя 4 подключен выход корректирующего контура 1с,, а ко входу преобразователя 3 - выход основного датчика 1. Выходные сигналы преобразователей 3 и 4, несущие информацию о . резонансных .частотах датчика 1 и корректирующего контура 1, поступают на вход вычислительного устрой-, ства 6. В вычислительном устройстве выходные сигналы преобразователей обрабатываются по алгоритму, исключающему зависимость результата пре образования от изменений диэлектрической проницаемости среды, и осуществляется оценка состояния датчика и корректирующего контура. При этом возможны следующие ситуации: корректируккдий контур и датчик , пусты корректирукхдий конт.ур заполнен частично, датчик пуст/ корректирующий контур заполнен полност1зю, датчик заполнен частично; корректирующий контур и датчик заполнены полностью. Если корректирующий контур пуст или наполнен частично, то выходной сигнал прибора соответствует нулевому значению уровня. Если корректирующий контур заполнен полностью, а основной датчик частично, то устройство, увравления остается в исходном состоянии, а измеряемый уровень Н равен уровню h жидкост в .основном датчике. В случае, если корректирующий контур и основной датчик ;заполнены полностью, выходной сигнал вычислительного устройства бчерез устройство 5 управления устанавливает коммутатор 2 в состояние, при котором к преобразователю 4 подключен основной датчик 1 , а к преобразователю 3 - следуклдий за основным датчик 12- После К(1 К-6 п-1) измерительных тактов прибор устанавливается в окончательное для данного измерительного цикла состояние, при котором к преобразователю 4 подключен высший из полностью заполненных датчиков, а к преобразователю 3 - частичНО заполненный или низший из пустых датчиков. Если к преобразователю 3 подключен пустой датчик, то измеряе мый уровень равен Н HX i - где i - номер высшего полностью зап ненного датчика. Если к преобразователю 3 подключен частично заполненный датчик с номером i +1/ то измеряемый уровнь Ну определяется выражением где hj(- величина уровня в частично заполненном датчике. Вид алгоритма преобразования вых ных сигналов f и f преобразовате лей 3 и 4 соответственно в вычислительном устройстве б определяется к струкцией датчика и требуемой точностью измерения. Наибольшую точност равную ±0,4% от длины датчика (i-J при изменении диэлектрической проницаемости среды е в диапазоне 1,21,6, обеспечивает алгоритм вида Зо11.)-- (,, f. - выходные сигналы преобразователей 3 и 4, с ответствующие пустым датчикам. С целью обеспечения высокой точности и простоты реализации более предпочтительным является алгоритм 4 ( Ъ (4о(4)-- который при изменении в диапазоне 1,2-1,6 обеспечивает погрешность не более ±0,5% от длины датчика ( i piКроме того, использование в качестве входного сигнала преобразова теля 4 сигналов самого верхнего из полностью заполненных датчиков позволяет уменьшить методическую погреш ность измерения, обусловленную град ентом по высоте емкости. Формула изобретения Высокочастотный уровнемер, содерж щий датчик, корректирующий контур. вычислительное устройство, соединенное С выходаг я двух преобразователей для выделения информативных параметров из выходных сигнааов датчиков и корректируюш.его контура, отличающийся тем, что, с целью повьляения точности и получения не зависимой от диапазона измерения абсолютной погрешности измерения, он снабжен дополнительными датчиками, число которых -равно 1 тс где Е (Н) - целая часть числа У hiax зксимальное значение измеряемого уровня,м; сГ - приведенная относительная погрешность измереЕ1ия каж,цого датчика Hi - требуемая величина абсолютной погрешности измерения,м) установленными Бертикально друг за другом над основным датчиком, устройство управления, вход которого соединён с одЕ{им из выходов вычислительного устройства, а выход - с цепями управления дополнительно введенного коммутатора, -соединяющего выходы датчиков и корректирующего контура со входами преобразователей, выход одного из которых соединен с вxoдa ш основного и всех четных дополнительных датчиков, а выход другого соеди-нен с входами корректирующего контура и всех He4eTtMx дополнительных датчиков, 2. Уровнемер по п. 1, отличающий с я тем, что нижний конец основного датчика совмещен с нулевой отметкой диапазона измерения/ а длина каждого датчика равна Источники информации, принятые во внимание при зкспертизе 1. Петров Б.Н. и др. Принцип инвариантности в измерительной технике. Наука, 1976, с. 188. Авторское свидетельство СССР № 46386В, G 01 F 23/28, 1974 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| УРОВНЕМЕР | 1998 |
|
RU2161297C2 |
| Уровнемер | 1981 |
|
SU1008621A1 |
| Уровнемер | 1987 |
|
SU1411772A1 |
| ЕМКОСТНЫЙ УРОВНЕМЕР | 1992 |
|
RU2042928C1 |
| Емкостной уровнемер | 1983 |
|
SU1118867A1 |
| Высокочастотный уровнемер | 1978 |
|
SU667818A1 |
| Резонансный уровнемер | 1976 |
|
SU591711A1 |
| Резонансный уровнемер | 1976 |
|
SU649958A1 |
| ЭНДОВИБРАТОРНЫЙ УРОВНЕМЕР С ВРЕМЕННОЙ РАЗВЕРТКОЙ | 1965 |
|
SU168910A1 |
| Инвариантный резонансный уровнемер | 1974 |
|
SU553472A1 |