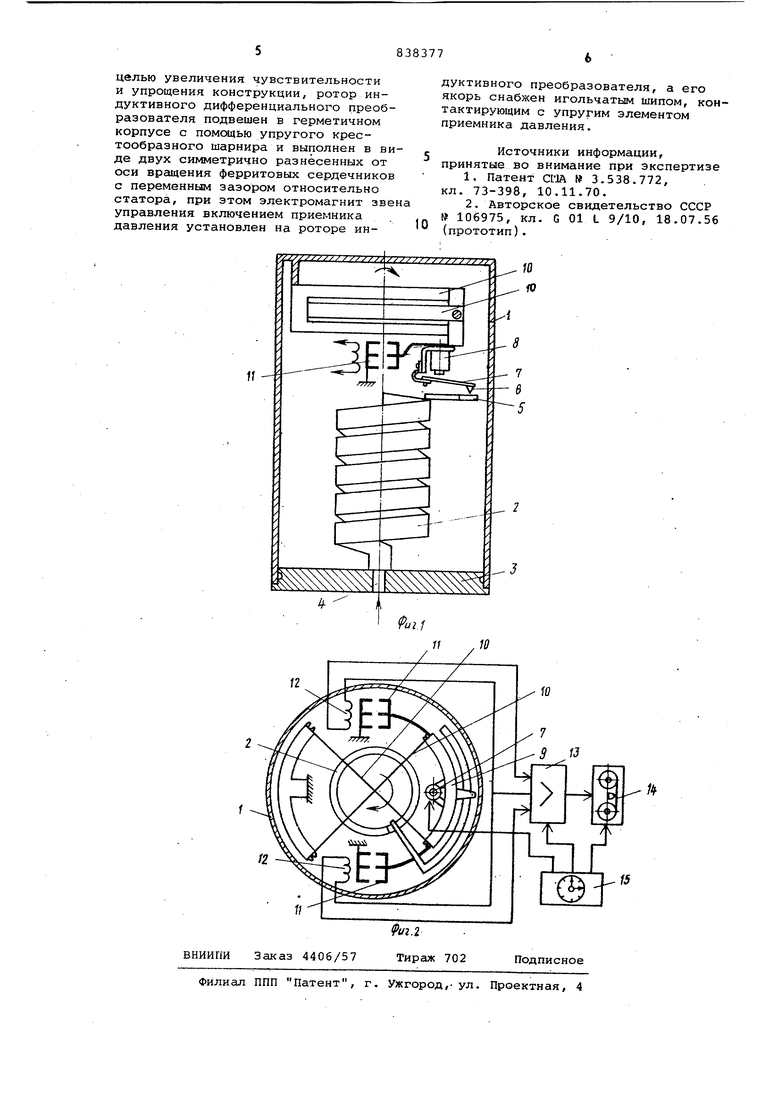
(54) МАРЕОГРАФ ОТКРЫТОГО МОРЯ очередь, позволяет использовать индуктивный преобразователь с мальзм рабочим ходом, рассчитанный только на естественный диапазон колебаний уровня воды, и тем самым обеспечива ет высокую чувствительность з. Однако наличие трения и люфта снижает чувствительность устройства которое также сложно по конструкции Цель изобретения - увеличение чувствительности и упрощение конструкции , Поставленная цель достигается тем, что ротор индуктивного дифференциального преобразователя под вешен в герметичном корпусе с помощью упругого крестообразного шар нира и выполнен в виде двух симмет рично разнесенных от оси вращения ферритовых сердечников с переменным зазором относительно статора, при этом электромагнит звена управления включением приемника давления установлен на роторе индуктивного преобразователя, а его якорь снабжен игольчатым шипом, контактирующим р упругим элементом приемника давления. На фиг.1 и 2 показаны вертикальная и горизонтальная проекции конструкции мареографа и элементы, входящие в его схему. МареограЛ состоит из герметичного корпуса 1 и размещенного в нем приемника давления с упругим элементом в виде манометрической многовитковой пружины (трубка Бурдона) 2, установленной на основании 3 корпуса с выходным отверстием 4 для подачи давления. Подвижный конец манометрической пружины имеет поводок 5, взаимодей ствующий с игольчатым шипом б, установленннм на якоре 7 электромагнита 8, являющегося элементом звена управления включением приемника давления. Электромагнит 8 закреплен на роторе 9 индуктивного дифференциального преобразователя, который подвешен к корпусу 1 на уп ругом крестообразном шарнире 10. Шарнир представляет собой две упру гие металлические пластины П-образ ной форлоа, расположенные под углом 90. Благодаря упругому шарниру 10 ротор 9 может в небольших пределах поворачиваться вокруг вертикальной оси, по которой пересекаются плоскости металлических пластин. На роторе 9 закреплены два ферритовых сердечника 11 с обмотками 12. Отве ная часть сердечников (статор)жест ко скреплена с корпусом 1 с малым. зазором относительно подвижной час 11. Электрический сигнал с выхода обмоток 12 индуктивного преобразов теля поступает на вход аналого-циф рового преобразозателя 13, выход п ключен ко вхбду регистратора 14 на магнитной кассете. Включение электромагнита 8, преобразователя 13 и регистратора 14 осуществляется по линиям связи от программно-часового механизма 15. Мареограф работает следующим образом. При погружении герметичногокорпуса 1 на заданную глубину гидростатическое давление воды через вхрдное отверстие 4 в крышке 3 поступает в манометрическую пружину 2 и вызывает разворот ее верхнего конца с поводком 5. Однако деформация пружины не передается на ротор 9 индуктивного преобразователя, поскольку якорь 7 электромагнита 8 находится в верхем притянутом положении и поводок 5 не соприкасается с игольчатым шилом б. После установки прибора на дно и некоторого периода стабилизации манометрической пружины 2 программно-часовой механизм 15 подает команду на выключение электромагнита 8 и происходит сцепление поводка 5 с шипом б. После момента сцепления указанных элементов малые деформации пружины 2, вызванные колебаниями гидростатического давления от изменения уровня моря, передаются ротору 9 индуктивного преобразователя. При поворотах ротора 9 изменяются зазоры в ферритовых сердечниках 10, в результате чего в их обмотках 12 вырабатывается электрический сигнал, преобраз уемЫй в цифровой код аналого-цифровым преобразователем 13, который записывается на магнитной ленте регистратора 14. С целью экономии питания включение измерительного преобразователя и регистратора проис ходит периодически на короткое время от программно-часового механизма 15. Электромагнит 8 находится во включенном состоянии в течение всего периода наблюдений, поэтому сцепление пружины 2 с ротором 9 не нарушается. Обработка результатов наблюдений, записанных на магнитной ленте регистратора 14, производится с помощью ЭВМ после извлечения мареографа на поверхность. Формула изобретения Мареограф открытого моря, содержащий герметичный корпус, размещенный в нем приемник давления с упругим элементом, кинематически соединенным с ротором индуктивного дифференциального преобразователя, звено.управления включением приемника давления в цепь регистратора с программно-часовым механизмом, включающее электромагнит с якорем, о тличающийся тем, что, с
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик давления | 1979 |
|
SU838463A2 |
| Датчик давления | 1983 |
|
SU1117472A1 |
| Прибор для испытаний материалов на микротвердость | 1990 |
|
SU1793294A1 |
| Устройство для измерения и регистрации скорости и направления ветра | 1960 |
|
SU134494A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЛИНЕЙНОЙ ПЛОТНОСТИ ВОЛОКНИСТОЙ ЛЕНТЫ | 1990 |
|
RU2023236C1 |
| ДИСТАНЦИОННЫЙ МАРЕОГРАФ | 1967 |
|
SU192420A1 |
| Устройство для дистанционного измерения морских волн | 1956 |
|
SU106975A1 |
| ЭЛЕКТРОМАГНИТ ПРИВОДА ЭЛЕКТРОУПРАВЛЯЕМОГО КЛАПАНА | 1995 |
|
RU2101597C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МАНОМЕТР | 2024 |
|
RU2835762C1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ КАПИЛЛЯРНЫХ СВОЙСТВ ПОЧВЫ | 1934 |
|
SU47105A1 |
