1
Изобретение относится к управлению Тяговыми электроприводами транспортных средств и может быть использовано в системах регулирования скорости машин напольного электротранспорта, электромобилей, рудничных аккумуляторных электровозов.
Известны способы управления импульсным преобразователем аккумуляторного транспортного средства путем изменения скважности импульсного преобразователя, при которых контролируют максимальные мгновенные или среднее 2 значения выходного тока импульсного преобразователя, сравнивают их с заранее заданным максимально допустимым уровнем и отг раничивалт скважно ть импульсного преобразователя и скорость ее изменения так, чтобы указанные значения выходного тока импульсного преобразователя не превышали упомянутого максимально допустимого уровня.
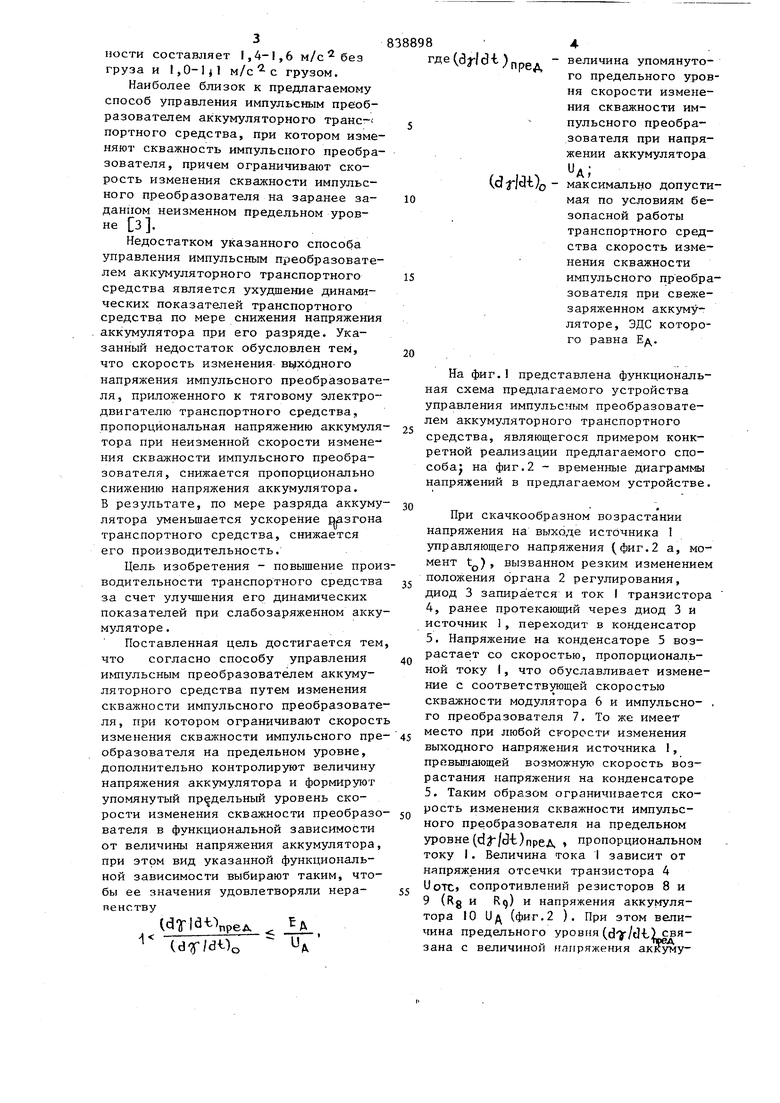
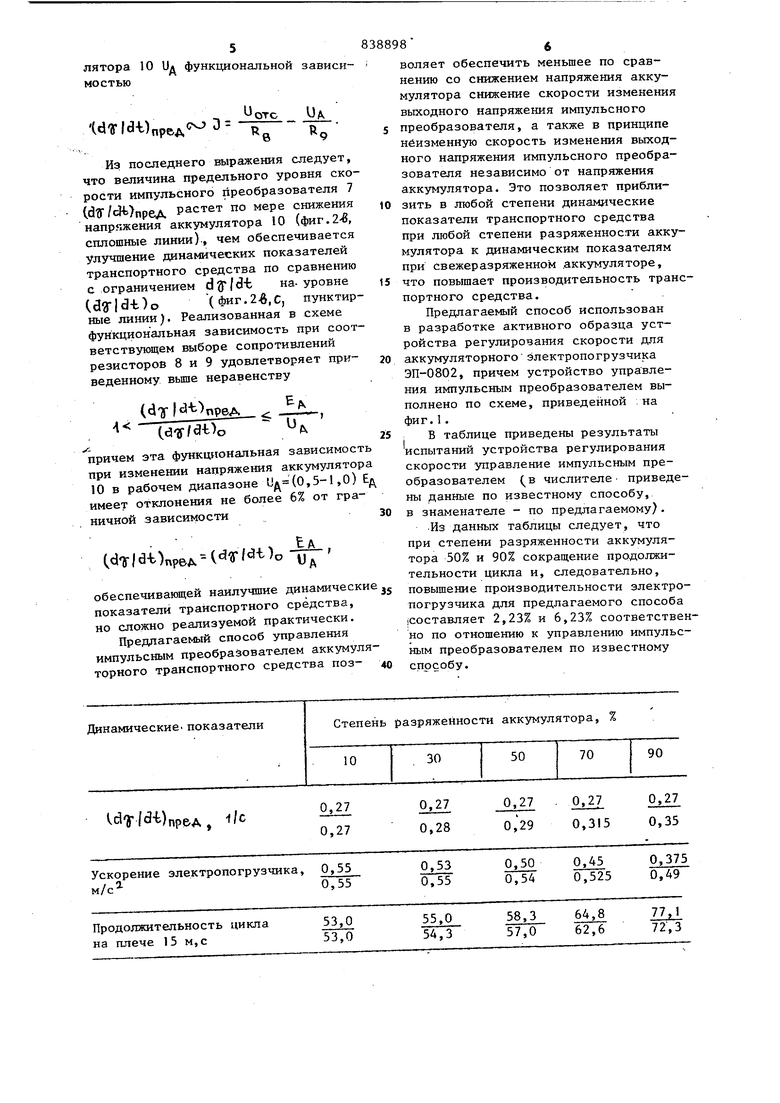
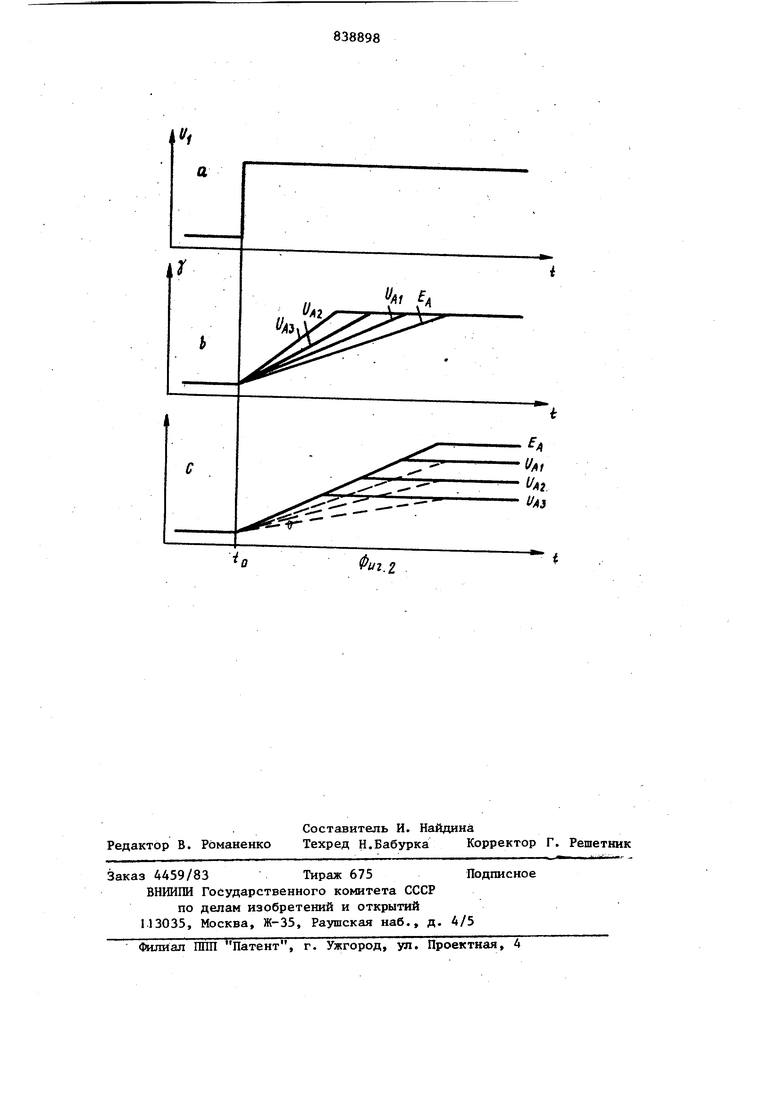
Недостатком таких способов управления импульсными преобразователями является невозможность создания на их базе систегв) регулирования транспортных средств, кото рые удовлетворяли бы требованиям действующих ГОСТов на эти транспортные средства. Так, момент на валу тяговЬго электродвигателя транспортного средства должен быть достаточным для преодоления этим транспортным средством при полной загрузке уклонов, максимальная крутизна которых составляет 10%, что и определяет нижнкпо границу упомянутого максимально допустимого уровня выходного тока импульсного преобразователя. При этом невозможно выполнить требование о том, что ускорение машин напольного электротранспорта не должно превышать 0,6 м/с , поскольку при указанных величинах тока тягового электродвигателя ускорение разгона транспортного средства на горизонтальной поверх3иости составляет 1,4-1,6 м/с без груза и 1,0-ljl грузом. Наиболее близок к предлагаемому способ управления импульсным преобразователем аккумуляторного транс-; портного средства, при котором изме няют скважность импульсного преобра зователя, причем ограничивают скорость изменения сквалшости импульсного преобразователя на заранее заданном неизменном предельном уровне 3. Недостатком указанного способа управления импульсным преобразователем аккумуляторного транспортного средства является ухудшение динамических показателей транспортного средства по мере снижения напряжения аккумулятора при его разряде. Указанный недостаток обусловлен тем, что скорость изменения выходного напряжения импульсного преобразовате ля, приложенного к тяговому электродвигателю транспортного средства, пропорциональная напряжению аккумуля тора при неизменной скорости изменения скважности импульсного преобразователя, снижается пропорционально снижению напряжения аккумулятора. В результате, по мере разряда аккуму лятора уменьшается ускорение пазгона транспортного средства, снижается его производительность. Цель изобретения - повышение прои водительности транспортного средства за счет улучшения его динамических показателей при слабозаряженном акку муляторе . Поставленная цель достигается тем что согласно способу управления импульсным преобразователем аккумуляторного средства путем изменения скважности импульсного преобразоват ля , при котором ограничивают скорос изменения скважности импульсного пр образователя на предельном уровне, дополнительно контролируют величину напряжения аккумулятора и формируют упомянутый предельный уровень скорости изменения скважности преобраз вателя в функциональной зависимости от величины напряжения аккумулятора при этом вид указанной функциональной зависимости выбирают таким, что бы ее значения удовлетворяли нерапенству (drldt npeA IA (dTT/dt), 8 где (dr/di) пред величина упомянутого предельного уровня скорости изменения скважности импульсного преобразователя при напряжении аккумулятора ид| (d dt/o - максимально допустимая по условиям безопасной работы транспортного средства скорость изменения скважности импульсного преобразователя при свежезаряженном аккумуляторе, ЭДС которого равна Ед. На фиг.1 представлена функциональная схема предлагаемого устройства управления импульсным преобразователем аккумуляторного транспортного средства, являющегося примером конкретной реализации предлагаемого способа) на фиг.2 - временные диаграммы напряжений в предлагаемом устройстве. При скачкообразном возрастании напряжения на выходе источника I 5Т1равляющего напряжения (фиг.2 а, момент tp), вызванном резким изменением положения органа 2 регулирования, диод 3 запирается и ток I транзистора 4,ранее протекающий через диод 3 и источник 1, переходит в конденсатор 5.Напряжение на конденсаторе 5 возрастает со скоростью, пропорциональной току I, что обуславливает изменение с соответствующей скоростью скважности модулятора 6 и импульсно- , го преобразователя 7. То же имеет место при любой скорости изменения выходного напряжения источника 1, превьгаающей возможную скорость возрастания напряжения на конденсаторе 5. Таким образом ограничивается изменения скважности импульсного преобразователя на предельном уровне ()прел пропорциональном току I. Величина тока I зависит от напряжения отсечки транзистора 4 UOTC сопротивлений резисторов 8 и 9 (Rg и Rq) и напряжения аккумулятора 10 Уд (фиг.2 ). При этом величина предельного уровня (Й7/с -Ь1связана с величиной плпряжения аккут улятора 10 Уд функциональной зависимостьюCdirldi) Из последнего выражения следует, что величина предельного уровня скорости импульсного преобразователя 7 (dtr/сН)пред растет по мере снижения напряжения аккумулятора Ю (фиг.2-6, сплошные линии)., чем обеспечивается улучшение динамических показателей транспортного средства по сравнению с ограничением dg |d-fe на-уровне (,cly|d-t)o (фиг-. 2, с, пунктирные линии). Реализованная в схеме функциональная зависимость при соответствующем выборе сопротивлений резисторов 8 и 9 удовлетворяет приведенному вьше неравенству (а-у (d-y/aib причем эта функциональная зависимост при изменении напряжения аккумулятор 10 в рабочем диапазоне U(0,5-1,0) Е имеет отклонения не более 6% от граничной зависимости (обеспечивающей наилучшие динамически показатели транспортного средства, но сложно реализуемой практически. Предлагаемый способ управления импульсным преобразователем аккумуля торного транспортного средства позволяет обеспечить меньшее по сравнению со снижением напряжения аккумулятора снижение скорости изменения выходного напряжения импульсного преобразователя, а также в принципе неизменную скорость изменения выходного напряжения импульсного преобразователя независимо от напряжения аккумулятора. Это позволяет приблизить в любой степени динамические показатели транспортного средства при любой степени разряженности аккумулятора к динамическим показателям при свежеразряженном .аккумуляторе, что повышает производительность транспортного средства. Предлагаемый способ использован в разработке активного образца устройства регулирования скорости для аккумуляторного электропогрузчика ЭП-0802, причем устройство управления импульсным преобразователем выполнено по схеме, приведенной на фиг.1. : В таблице приведены результаты испытаний устройства регулирования скорости управление импульсным преобразователем (в числителе приведены данные по известному способу, в знаменателе - по предлагаемому). Из данных таблицы следует, что при степени разряженности аккумулятора 50% и 90% сокращение продолжительности цикла и, следовательно, повышение производительности электропогрузчика для предлагаемого способа .составляет 2,23% и 6,23% соответственно по отношению к управлению импульсным преобразователем по известному способу. Формула изобретения Способ управления импульсным преобразователем аккумуляторного транспортного средства путем изменения скважности импульсного преобразователя, при котором ограничивают скорость изменения скважности импульсного преобразователя на предельном уровне о тлич ающийся тем, что, с целью повышения производительности транспортного средства за счет улучшения его динамических показателей при слаборазряженном аккумуляторе, дополнительно контролируют величину напряжения аккумулятора и устанавливают упомянутый предельный уровень скорости изменения, скважности импуль ного преобразователя в функциональной зависимости от величины напряжения аккумулятора, при этом указанную функциональную зависимость выбирают таким образом, чтобы ее значения удо летворяли неравенству №rf)npeA ЕА 7 1ГГ- . tdfldi) me()npeA - величина упомянутог предельного уровня скорости изменения скважности и9гаульс88 ного преобразователя при напряжении аккут мулятора ид; (аг - максимально допустимая по условиям безо. пасной работы транспортного средства скорость изменения скважности импульсного преобразователя при свежеразряженном аккумуляторе, ЭДС которого равна - . ЕАИсточники информации , нятые во внимание при экспертизу 1. Патент Японии № 48-236J1, 1963. серия У СП сб. № 33 75. 2.Разработка и исследование тирисо-импульсной системы управления одиодвигаТельного грузового электбиля. Отчет НИР, ч.Ш Гос.регистраный № 74062527, 1977. ,Красонтович М.Ю. Система упения тиристорного преобразоватеривода электромобиля. Вестник ского политехнического института. я радиоэлектроника, 1977, вып.15, 4-35.
иг.2