(54) ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь для измерения линейных и угловых перемещений | 1989 |
|
SU1679176A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ БОЛЬШИХ УГЛОВЫХ И МАЛЫХ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2062975C1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2480710C2 |
| Трансформаторный преобразователь линейных и угловых перемещений | 1987 |
|
SU1413407A1 |
| Трансформаторный преобразователь линейных и угловых перемещений | 1984 |
|
SU1224556A1 |
| Трансформаторный преобразователь линейных и угловых перемещений | 1988 |
|
SU1536187A1 |
| Трансформаторный датчик перемещений | 1989 |
|
SU1753246A1 |
| Трансформаторный преобразователь линейных и угловых перемещений | 1989 |
|
SU1679177A1 |
| Трансформаторный преобразователь линейных и угловых перемещений | 1984 |
|
SU1195180A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПЕРЕМЕЩЕНИЯ | 1991 |
|
RU2006790C1 |
: . - . 1 - , . . Изобретение относится к измерител ной технике и мспКет быть испооЛзовано для одновременного измерения угловых и малых линейных перемещений в различных областях промышленности. Известно устройство для измерения линейных или угловых перемещений, со держащее подвижный и неподвижный магнитопроводы, обмотку возбуждения и измерителы гю обмотку fl. К недостаткам указанных преобразователей относятся отсутствие воз - мшсности одновременного измерения малШс линейных и больших угловых пер «ещений, малая чувствительность. Наиболее близким к предлагаемому является преобразователь угловых перемещений, содержащий коаксиально расположенные статор в виде пустотелого цилиндра и ротор в виде части пустотелого цилиндра, обмотку В10збуждения и измерительную-обмотку, расположенные в пазах статрр а -Czl. Недостатком этого преобразователя усилий является возможность измерения только угловых перемещений. Цель изобретения - осуществленн одновременного измерения больших угловых и малых линейных перемещений. Поставленная цель достигается тем, что преобразователь снабжен дополнительным магнитопроводом в виде пустотелого цилиндра, расположенного коаксиально статору, с двзпмя обмотками возбуждения и двумя измерительными обмотками, расположенными попарно в вертикальных плоскостях, параллельных вертикальной плоскости симметрии дополнительногб. Магнитопровода, обмотки статора расположены в вертикальной плоскости, параллельной вертикальной плоскости симметрии статора, а статор выполнен подвижным относительно дополнительного магнитопровода в направлении, перпендикулярном его вертикальной плоскости симметрии..
Кроме того, обмотки дополнителього магнитопровода соединены по ифференциальной схеме измерения, а также с целью повышения чувствительности и точности преобразования, изерительные обмотки и обмотки возбуждения расположены совместно в пазах магнитопроводов.
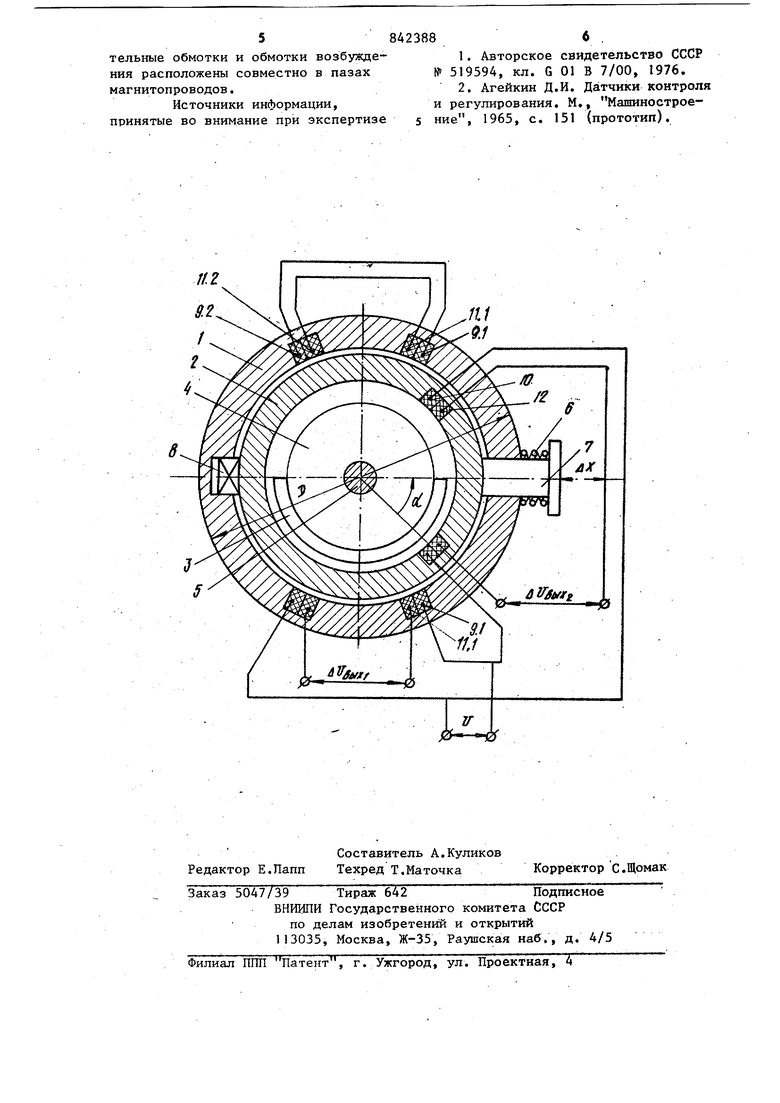
На чертеже изображено конструктивное выполнение индуктивного преобразователя.
Преобразователь содержит коакси- ально расположенные дополнительный магнитопровод 1, статор 2, ротор 3, неметаллический цилиндр Д, жест-, ко закрепленный на оси 5 вращения противодействующую пружину 6, направляющие стержни 7, 8, обмотки 9.1,9,2;10 возбуждения, измерительные обмотки 11.1, 1.2, 12. При измерении инейных перемещений чувствительным элементом является статор 2, изготовленный из сплошной конструкционной стали. При измерении угловых перемещений чувствительным элементом является ротор 3, изготовленный из сплошной конструкционной .стали. .
Устройство работает следующим образом.
Линейное перемещение через направляющий стержень 7 передается статору 2, при этом в правой части величина воздушного зазора между магнитопроводом 1 и статором 2 увеличивается, а в левой части уменьшается. Таким образом, за счет увеличения магнитного сопротивления в правой части и уменьшения его в левой части индуктируемое напряжение в измерительной обмотке 11.1 уменьшается, а в обмотке 11.2 увеличива1ется.
Так как эти обмотки соединены .по дифференциальной схеме, то выходное напряжение & 11 . удет с.оответство-.
ов1л
вать линейному перемещению дХ.
Для измерения угла поворота ротор 3 устанавливается на цилиндре 4 и свободно поворачивается внутри статора 2, измерительная обмотка 12 и обмотка 10 возбуждения вместе расположены в двух параллельных диаметральных внутренних пазах статора 2.
Во время измерения углбвых перемещений чувствительный элемент связывается с объектом измерения и при.его повороте перекрывается обмотка 10 возбуждения, в результате
чего меняется магнитное сопротивление цепи преобразователя, следовательно, изменяется напряжение, индуктированное в измерительной обмотке 12.
Предлагаемая конструкция индуктивного преобразователя угловых и малых линейных перемещений позволяет осуществить одновременное измерение больших угловых и малых линейных перемещений, свести к минимуму затраты на изготовление преобразователя, так как вместо двух отдельных преобразователей для измерения мальк линеных и больших угловых перемещений можн
изготовить рдин преобразователь простой конструкции, в качестве материала магнитопровода которого можно использовать широко распространенные конструкционные стали.
Формула изобретения
и измерительную обмотку, расположенные в пазах статора, о т л и ч. а - ю щ и и с я тем, что,с целью одновременного измерения малых линейных и больших угловых перемещений, он снабжен дополнительным магнитопроводом в виде пустотелого цилиндра расположенного коаксиально статору, с двумя обмотками возбуждения и двумя измерительными обмотками, распдложенными попарно в вертикальных плокостях, параллельных вертикальной плоскости симметрии дополнительного магнитопровода, обмотки статора расположены в вертикальной плоскости, параллельной вертикальной плоскости симметрии статора, а статор выполнен подвижным относительно дополнительного магнитопровода в направлении, перпендикулярном его вертикальной плоскости симметрии.
|С целью повьш1ения чувствительности и точности преобразования, измери5842388тельные обмотки и обмотки возбуждения расположены совместно в пазах магнитопроводов. Источники информации, принятые во внимание при экспертизе № и ни 1.Авторское свидетельство СССР 519594, кл. G 01 В 7/00, 1976. 2.Агейкин Д.И. Датчики контроля регулирования. М., Машиностроее, 1965, с. 151 (прототип).
