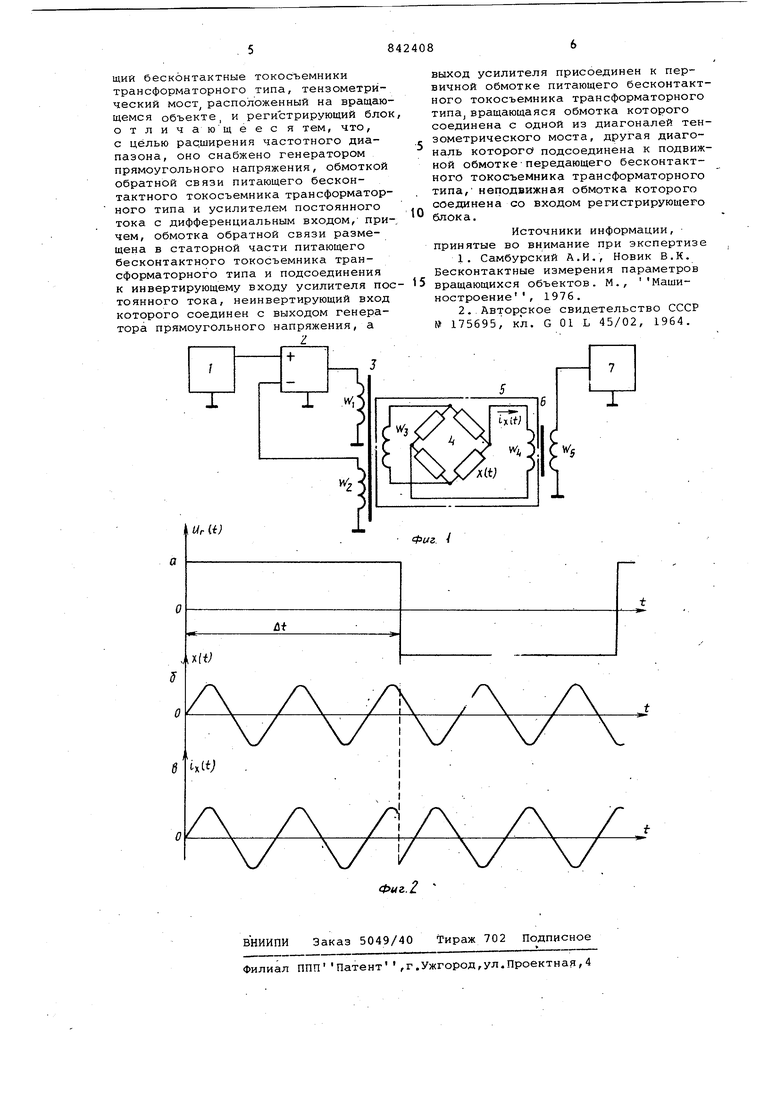
(54) УСТРОЙСТВО ДЛЯ И5МЕРЕНИЯ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ ВРАЩАЮЩИХСЯ ОБЪЕКТОВ щему входу усилителя постоянного тока, неинвертирующий вход которого соединен с выходом генератора прямо угольного напряжения, а выходусили теля присоединен к первичной обмотк питающего бесконтактного токосъемни ка трансформаторного типа, вращающаяся обмотка которого соединена с одной из диагоналей тензометрического моста, другая диагональ которо го подсоединена к подвижной обмотке передающего бесконтактного токосъемника трансформаторного типа, не подвижная обмотка которого соединен со входом регистрирующего блока. На фиг.1 представлена блок-схема устройства;на фиг.2 - временные диаг раммы . Устройство для измерения динамических параметров вращающихся объектов содержит генератор 1 прямоугольного напряжения,усилитель 2 постоянного тока с дифференциальным входом питающий бесконтактный токосъемник 3 трансформаторного типа, тензометрический мост 4, расположенный на вращающемся объекте 5, передающий бесконтактный токосъемник транспор ного типа и регистрирующий блок 7. Устройство работает следующим образом. Генератор 1 фор 1ирует напряжение V.t) (фиг.2а) ппямоу голь ной формы с длительностью д t , заведомо большей периода низшей гармоники кон тролируемого частотного диапазона динамического параметра x(t) (фиг.26). Это напряжение поступает на неинвертирующий вход усилителя 2 постоянного тока с коэффициентом к, а затем на первичную обмотку wjj питающего токосъемника 3. Возникающе на обмотке 2. обратной связи напряжение VQC подаётся на инвертирующий вход усилителя 2. Дифференциальный сигнал л ,-VQP формирующийся на входе усилителя -2, усиливается в к раз и прикладывается к первичной обмотке W., токосъемника 3, вызывая в ней ток такой величины, чтобы разностный сигнал д ,-Ур|.уменьшился., При достаточно большом значении коэффициента усилия к усилителя 2 разностный сигнал О, а следовательно, напряжение, формируемое в обмотке обратной связи будет точно совпадать по форме с напряжением v,(t) (фиг.2а). Во вращающейся обмотке w токосъемника 3 формируется напряжение, повторяющее по форме напряжение Vy,(t) (фиг.2). Это напряжение поступает на одну из диагоналей тенэометрического моста 4, расположенного на вращающемся объекте 5. Разбаланс моста 4, под действием контролируемого динамического параметра х (t) (фиг.26) приведет к возникновению тока i)((t) в его измерительной диагонали, протекающего- через врашающуюся обмотку пере (фиг.2в) .. Индуктированный в неподвижной обмотке Wg- сигнал, пропорциональный величине разбаланса моста, а следовательно и величине контролируемого динамического параметра x(t) , регистрируется блоком 7. При смене полярности питающего напряжения на диагонали тензомоста 4 направление тока 1 it) меняется на противоположное, следовательно, инвертируется фаза регистрируемых колебаний (фиг.2в). Восстановление начальной фазы колебаний осуществляется регистрирующим блоком 7. Таким образом в устройстве питание тензометрического моста осуществляется постоянным током в течение интервалов д t. Длительность этих интервалов зависит от конструкции и материала магнитопровода передающего токосъемника 3, а также от числа витков обмоток w и wg. При правильно сконструированном токосъемнике 3 удается получить значёниеЛ-Ь 200-100(т,оНто соответствует значениям периодов гармонических колебаний с частотой 5-10 Гц. Ширина частотного диапазона в устройстве связана только с инерционными свойствами материала магнитопровода передающего токосъемника 6. Отсутствие каких-либо элементов электроники на вращающемся объекте снимает все ограничения по температурному и скоростному диапазону применения. Кроме этого, низкочастотный процесс перемагни чивания сердечника магнитопровода передающего токосъемника 3 позволяет использовать в качестве материала пермаллои, электротехнические стали и другие низкочастотные ферромагнитные материалы. Это приводит к улучшению связи между обмотками Y/ и W, уменьшению их потоков рассеяния, что увеличивает КПД. В устройстве для измерения динамических параметров вращающихся объектов число измерительных каналов, которые можно организовать при параллельном подключении тензометрических мостов к подвижной o oiке питающего токосъемника, ограничено только мощностью этого токосъемника. Формула изобретения Устройство для измерения динами- : еских параметров вращающихся объеков, содержащее питающий и передающий бесконтактные токосъемники трансформаторного типа, тензометрйческий мост расположенный на вращаю щемся объекте, и регистрирующий бло отличающеес я тем, что, с целью расширения частотного диапазона, оно снабжено генератором прямоугольного напряжения, обмоткой обратной связи питающего бесконтактного токосъемника трансформатор ного типа и усилителем постоянного тока с дифференциальным входом, при чем, обмотка обратной связи размещена в статорной части питающего бесконтактного токосъемника трансформаторного типа и подсоединения к инвертирующему входу усилителя по тоянного тока, неинвертирующий вход которого соединен с выходом генератора прямоугольного напряжения, а выход усилителя присоединен к первичной обмотке питающего бесконтактного токосъемника трансформаторного типа вращающаяся обмотка которого соединена с одной из диагоналей тензометрического моста, другая диагональ которого подсоединена к подвижной обмоткепередающего бесконтактного токосъемника трансформаторного типа, неподвижная обмотка которого соединена со входом регистрирующего блока. Источники информации, принятые во внимание при экспертизе 1.Самбурский А.И., Новик В.К, Бесконтактные измерения параметров вращающихся объектов. М., Машиностроение , 1976. 2.Авторское свидетельство СССР № 175695, кл. G 01 L 45/02, 1964.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения динамических параметров вращающихся объектов | 1980 |
|
SU941857A1 |
| Устройство для измерения динамических параметров элементов вращающихся объектов | 1982 |
|
SU1027520A1 |
| Устройство для измерения динамических параметров вращающихся объектов | 1980 |
|
SU938022A1 |
| Устройство для измерения динамических параметров вращающихся объектов | 1980 |
|
SU949334A1 |
| Устройство для измерения динамических параметров вращающихся деталей силовых установок | 1981 |
|
SU1026013A1 |
| Устройство для питания вращающихся тензорезистивных цепей | 1982 |
|
SU1081567A1 |
| Устройство для передачи электрических сигналов | 1981 |
|
SU1014002A1 |
| Устройство для передачи электрических сигналов | 1981 |
|
SU963051A1 |
| Устройство для измерения динамических параметров вращающихся объектов | 1983 |
|
SU1201676A1 |
| Устройство для измерения динамических параметров элементов вращающихся объектов | 1989 |
|
SU1631276A2 |
