54) КОПЕР ДЛЯ УДАРНЫХ ИСПЫТАНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Копер для ударных испытаний | 1979 |
|
SU832414A1 |
| Копер для ударных испытаний | 1975 |
|
SU636506A1 |
| Копер для ударных испытаний | 1975 |
|
SU742737A2 |
| Копер для ударных испытаний изделий | 1982 |
|
SU1070436A1 |
| Копер для ударных испытаний | 1975 |
|
SU694792A1 |
| Копер для ударных испытаний | 1976 |
|
SU636507A1 |
| Копер для ударных испытаний | 1987 |
|
SU1538080A1 |
| Копер для ударных испытаний | 1987 |
|
SU1603208A1 |
| Копер для ударных испытаний | 1976 |
|
SU654878A2 |
| Копер | 1980 |
|
SU947696A2 |


Изобретение относится к испытатель ной технике, в частности к. устройст.вам для испытаний материалов и изделий на ударные нагрузки. Известен копер для ударных испытаний, содержащий корпус, ротор, размещенный на периферии ротора держатель аставленный в держатель боек, выполненный в. виде шара, связанный с корпу сом конусный ствол, ось которого расположена по касательной к траектории бойка, узел крепления испытуемого объекта, установленный на срезе ствола Ш . Недостатком данного копра является то, что вследствие разброса пг раметров торможения (коэффициент трения, усилия прижима и т.п,) от испытания к испытанию направление свободного полета бойка в той или иной степени отличается от направления оси ствола. Поэтому соударение бойка с испытуемым объектом происходит под /глами, несколько отличающимися друг от друга, что снижает точность воспроизведения заданной нагрузки. Наиболее близким к предлагаемому яо технической сущности является котер для ударных испытаний, содержащий полый корпус, ротор, жестко зак репленный на приводном валу, размещенные на периферии ротора держатели, вставленные в держатели бойки в виде шаров, механизм ввода бойков на исходную позицию для нанесения удара, включающий полый цилиндр с винтовым пазом, ролик, входящий в винтовой паз, и волноводы для передачи ударного импульса испытуемым изделиям, волноводы установлены на срезах стволов, связанных с корпусом Г23 Недостаток этого устройства состо.ит в том, что бойки перед ударом о волноводы движутся по внутренней цилиндрической поверхности ствола, т.е. существует вероятность отклонения их при ударе от своего центрального положения в любую сторону, на величину зазора, а при большом количестве циклов этот зазор дополнительно возрастает, так как при ударах из-за пластической деформации происходит отслаивание материала с поверхности бойков и они уменьшаются при этом в диаметре. Это приводит к тому, что удары бойков о волноводы будут нецентральными, что снижает точность испытаний. Цель изобретения - повышение точности испытаний.
Указанная цель достигается тем, что ротор установлен на приводном валу шарнирно, с возможностью поворота ,в.плоскости, перпендикулярной плоскости его вращения, один конец каждого волновода установлен в полости корпуса в пt лoжeнии, обеспечивающем центральный удар по ним бойками, зафиксированными в держателях, каждый из держателей выполнен в виде подпружиненного рычажного захвата, на рычагах которого образованы опорные призмы для бойка, а ось ролика закреплена на роторе.
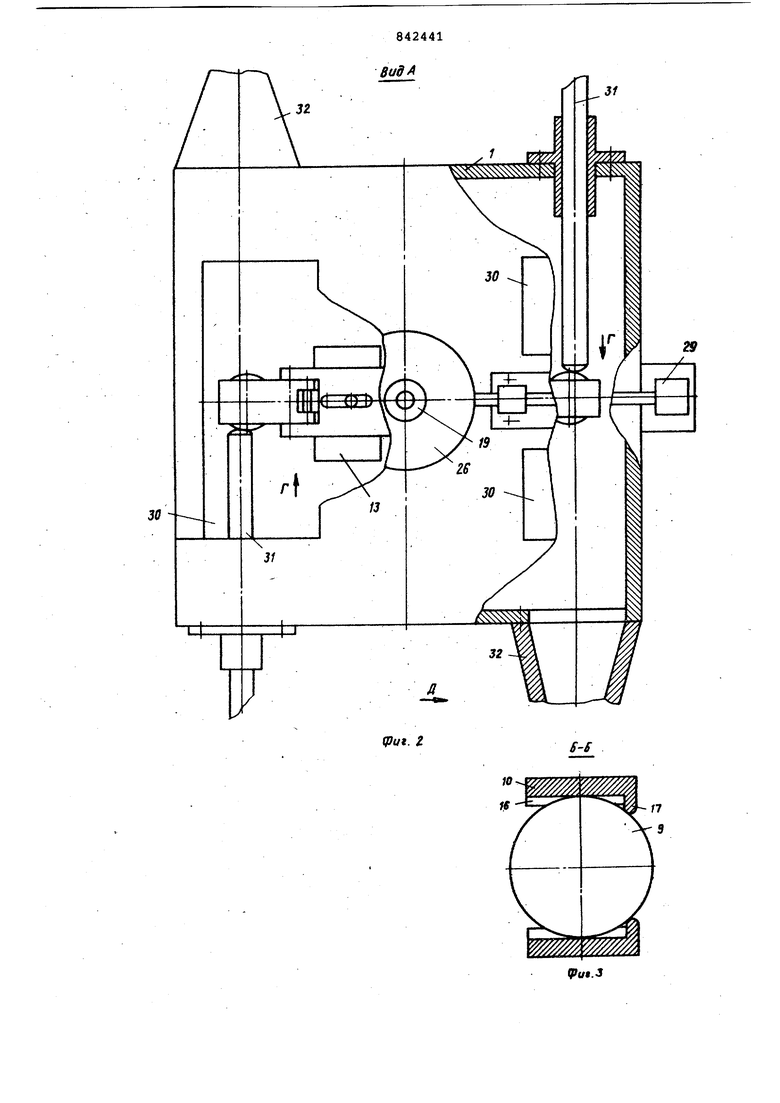
На фиг. 1 изображено предлагаемое устройство, поперечный разрез; на фиг, 2 - вид А на фиг. 1; на фиг.З разрез Б-В на фиг. 1;. на фиг. 4 вид Г на фиг. 2; на фиг. 5 - вид Д на фиг. 2.
Копер содержит.полый корпус 1 с крышкой 2. Ко дну корпуса прикреплен привод 3, вал которого соединен через муфту (не показаны) с валом 4 копра, установленным в опорах 5 с возможностью вращения. Верхняя, часть вала выполнена в виде вилки 6,где с возможностью поворота вокруг оси 7 в плоскости, перпендикулярной плоскости вращения вала 4, установлен ротор 8, на периферии которого расположены два держателя с вставленньми в них бойками 9 в виде шаров. Каждый из держателей выполнен в виде подпружиненного рычажного захвата, состоящего из рычагов 10 и 11, шарнирно связанный между собой, толкателя 12, груза 13, пружины 14 и штока 15, применяемого в качестве направляющей. На рьгчагах 10 образованы опорные примы 16 и упоры 17. На роторе 8 установлены стойка 18 с роликом 19 и противовес 20, вз аимно уравновешивающие друг друга при.вращении вала 4. Роли 19 входит р механизм вывода бойков 9 на исходную позицию для нанесения удара. Этот механизм включает также полый цилиндр 21, внутренняя поверхность которого состоит из конуса 22, переходящего в цилиндрический винтовой паз 23, заканчивающийся проточкой 24 с диаметром больше диаметра винтового паза. Цилинд 21 помещен с возможностью поступательного движения в направляющей 25, установленной на крышке 2. Сверху к нему крепится фланец 26, подпружиненный пружиной 27 и имеющий возможность контакта с фиксатором 28, соединенным с механиз1«|рм. 29 возвратно-поступательного действия, который установлен на корпусе 1.
В крышке 2 выполнены загрузочные окна 30. К корпусу 1 крепятся два волновода 31, один конец каждого из которых установлен в полости корпуса в положении, обе спечивающем центральный удар по ним бойков 9,зафиксированных в держателях, и прием-;
ные устройства 32. Последние состоят из улавливающей части 33, направляющей части 34, демпфера 35 и лотка 36 с амортизатором 37. Демпфер 35 сос toит из корпуса 38, рабочего тела 39 (песка, земли, опилок и т.д.) и перегородки 40.
Для загрузки бойков 9 в опорные призмы 16 перед испытанием служат ручки 41.
Копер работает следующим образом.
В исходный момент ролик 19 находится в контакте с конусом 22 цилиндра 21. Фланец 26 застопорен фиксатором 28. Пружина 27 находится в слегка сжатом состоянии. Войки 9 расположены между призмами 16 так, что упираются своей поверхностью в упоры 17 и зажаты в этом положении пружинами 14, воздействующими на рычаги 10 через толкатель 12, грузы 13 и рычаги 11.
При включении оператором привода 3 вал 4, а вместе с ним и ротор 8 начинают вращаться с заданной скоростью При этом одна половина ротора вращается в верхней;части корпуса 1, а друная- - в нижней его части. Контакт ролика 19 с конусом 22 цилиндра 21 осуществляется без зазора, поэтому стуков и колебаний ротора 8 при его разгоне не происходит. Войки 9 под действием центробежной силы стремятся раздвинуть рычаги 10, но их сдвигает действующая на грузы 13 центробежная |сила и сила упругости пружин 14. I Рычаги 11 в этот момент находятся под углом 165-175°, и поэтому на рычаги 10 действуют значительные усилия, заставляющие их сходиться даже в том случае, когда центробежные силы, действующие на грузы 13, невелики .
Если скорость ротора так мала, что центробежные силы, действующие на грузы 13, практически отсутствуют,то усилия для сдвигания рычагов 10 исходят от пружин 14. При подаче оператором сигнала на механизм 29 возвратно-поступательного действия фиксатор 28 выходит из контакта с фланцем 26, который вместе с цилиндром 21 начинает перемещаться вверх под действием пружины 27. Момент от центробежных сил, действующих на ротор 8 и стремящихся повернуть его в горизонтальное положение, при этом вталкивает ролик 19 в винтовой паз 23. Ролик, двигаясь по винтовому пазу, поднимает цилиндр 21, самовывинчиваясь , до тех пор, пока он не выходит на цилиндрическую проточку 24.При этом ротор 8 устанавливается в горизонтальное положение, вращаясь вокруг оси 7, и двигается так дальше до удара бойков 9 о волноводы 31.
В момент удара ротор 8 всегда занимает одно и то же положение в силу
контакта ролика 19 и цилиндрической поверхности проточки 24, которые выполнены с высокой твердостью. Контакт между ними в это время поддерживается не моментом центробежных сил, действующих на ротор, а таким же по природе и меньшим по величине моментом, действующим на стойку 18 с рол1и ом 19 и противовес 20. Ротор |8 устанавливается в горизонтальное положение за ЗО до удара бойков 9 о волноводы 31 во всем диапазоне, изменения своей скорости. При ударе бойгки выскальзывают из призм 16 и отскакивают в приемные устройства 32, влетая сначала в улавливающую часть
33,а затем в направляющую Часть
34,гася свою энергию о демпфер 35, и скатываются потом в лоток 36.Удары бойков 9 о стенки лотков смягчаются амортизатором 37. Если скорость ротора 8 в момент удара так мала, чт отскочившие от волноводов 31 бойки
9 не могут долететь до приемных устройств 32, то он скатывается туда по наклонному полу корпуса 1.
Как только бойки 9 выскальзывают из призм 16, грузы 13 под действием пружин 14 и центробежных сил сейчас же начинают движение от центра вращения ротора 8. В момент., когда рычаги 11 устанавливаются по одной прямой, рычаги 10 сходятся на небольшую величину по сравнению с положением I фиг. 4), но так, что между ними остаемся расстояние, достаточное для прохождения волноводов 31 в процессе вращения ротора 8. Двигаясь дальше, .грузы 13 воздействуют толкателями 12 и рычагами 11 на рычаги 10 так, что они раздвигаются и устанавливаются в положение 1I, чем исключают возможность удара бойков 9, отскочивших от волноводов 31, о рычаги 10, вращающиеся вместе с ротором 8 до его полной остановки. Быстродействие этого механизма подобрано так, что переход рычагов 10 из положения I в положение I осуществляется менее чем за пол-оборота ротора 8.
При движении грузов 13 рычаги 10 сходятся в одинаковой степени, и если диаметр бойков уменьшается в силу отслаивания материала с его поверхности, то положение центра масс бойков 9 относительно продольных осей
волноводов 31 все равно остается на прежнем месте.
Далее оператор выключает привод 3 копра, а когда рртор 8 останавливается, Твынимает из лотков 36 бойки 9 и вставляет их через загрузочные окна 30 между призмами 16 до упоров 17, предварительно оттянув грузы 13 за ручки 41, при опускании которых бойки автоматически зажимаются.
Затем оператор наклоняет ротор 8, опускает цилиндр 21 так, что ролик 19 входит в контакт с конусом 22, и стопорит фланец 26 фиксатором 28. Потом включает привод 3 и весь цикл повторяется.
5
Таким образом, за счет того, что удары бойков 9 о волноводы 31 получаются центральными, повышается точность испытаний.
0
Формула изобретения
Копер для ударных испытаний, содержащий полый корпус, ротор, размещенные на периферии ротора держате5ли, вставленные в держатели бойки в виде шаров, механизм вывода бойков на исходную позицию для нанесения удара, включающий полый цилиндр с винтовым пазом, ролик, входящий в
0 винтовой паз, и волноводы для передачи ударного импульса испытуемым из- , делйям, отличающийся тем, что, с целью повышения точности испытаний, ротор установлен на при5iводном валу шарнирно, с возможностью поворота в плоскости, перпендикулярной плоскости его вргицения, один конец каждого волновода установлен в полости корпуса в положении, обес0печивакяцем центральный удар по ним бойками, зафиксированными в держателях, каждый из держателей выполнен в виде подпружиненного рычажного эахвата, на рычагах которого образованы опорные призквл для бойка, а ось роли5ка закреплена на роторе.
Источники информации, принятые во внимание при экспертизе
0
654878, кл. S 01 М 7/00, 1976 (про отип) .
tput. Z
S-f
