(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИЖИМНЫМ РОЛИКОМ ЛЕНТОПРОТЯЖНОГО МЕХАНИЗМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для пуска и остановаМАгНиТНОй лЕНТы | 1979 |
|
SU832585A1 |
| Устройство для измерения длины отрезка магнитной ленты в кассете | 1987 |
|
SU1472945A1 |
| Устройство для магнитной записи иВОСпРОизВЕдЕНия иНфОРМАции | 1978 |
|
SU798976A2 |
| Устройство для магнитной записи и воспроизведения информации | 1977 |
|
SU711617A1 |
| Электропривод для лентопротяжного механизма | 1980 |
|
SU868961A1 |
| Устройство для управления лентоприжимом аппарата магнитной записи | 1983 |
|
SU1086456A1 |
| Устройство для управления скоростьюпЕРЕМЕщЕНия лЕНТОчНОгО НОСиТЕля зАпиСи | 1979 |
|
SU830552A1 |
| Устройство для управления лентопротяжным механизмом | 1980 |
|
SU862214A1 |
| Устройство для управления скоростью движения магнитной ленты | 1980 |
|
SU902067A1 |
| Устройство управления лентопротяжным механизмом | 1977 |
|
SU672650A1 |
I
Изобретение относится к области накопления информации, а именно к устройствам для управления прижимным роликом лентопротяжных механизмов.
Известно устройство для управления прижимным роликом лентопротяжного механизма, содержащее узел прижима-отвода, на котором прижимной ролик установлен с возможностью обеспечения сопряжения магнитной ленты с ведущим валом лентопротяжного механизма 1.
Известное устройство имеет относительно простую конструкцию, однако, оно не обеспечивает достаточную простоту процесса управления прижимным роликом лентопротяжного механизма.
Известно также устройство дя управления прижимным роликом лентопротяжного механизма, содержащее усилитель мощности, выход которого соединен с узлом прижима-отвода, на котором прижимной ролик установлен с возможностью обеспечения сопряжения магнитной ленты с ведущим валом лентопротяженого механизма, элементы И, фазоинверторы, конденсаторы, резисторы, входные щины сигналов прямого
хода, обратного хода, исходного состояния и окончания магнитной ленты и щины питания 2.
Это устройство обеспечивает относительную простоту процесса управления прижимным роликом лентопротяжного механизма. Недостаток устройства состоит в значительной деформации магнитной ленты.
Цель изобретения - уменьщение деформации магнитной ленты.
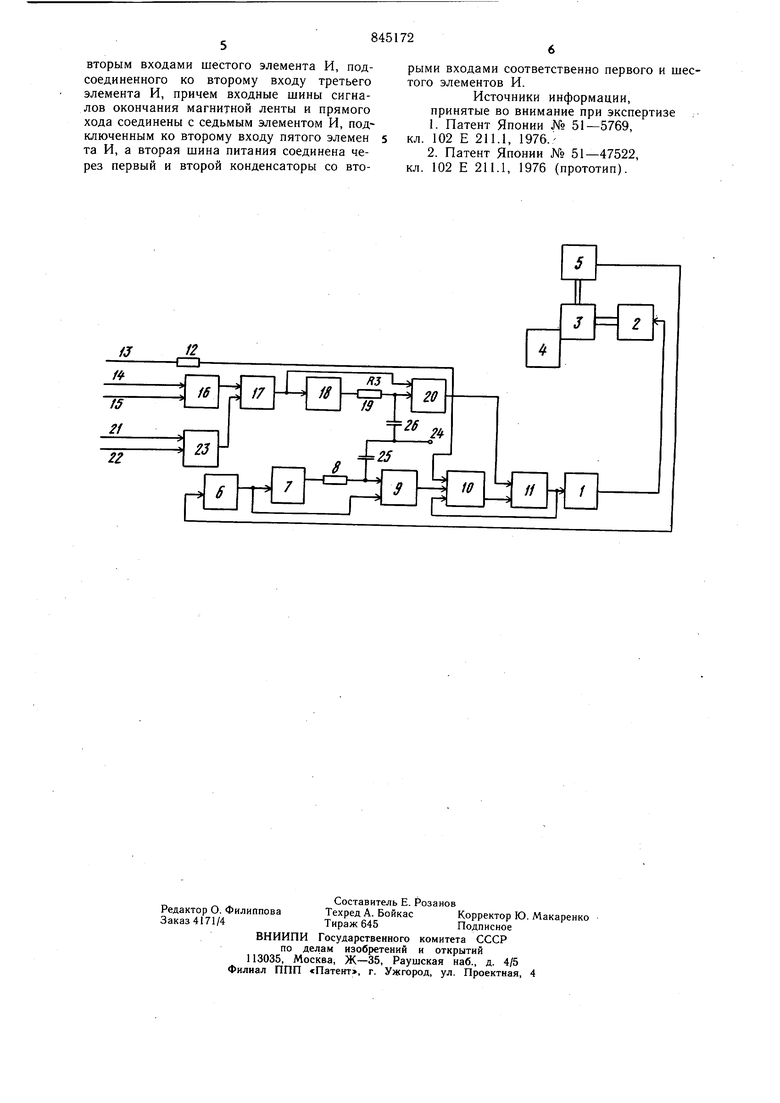
Это достигается за счет того, что. в устройство для управления прижимным роликом лентопротяжного механизма введен датчик отвода, кинематически соединенный с прижимным роликом и подключенный ко входу первого фазоинвертора, выход которого соединен непосредственно и через включенные последовательно второй фазоинвертор и тгервый резистор соответственно с первым и вторым входами первого элемента И подключенного к первому из входов второго элемента И, соединенного с первым из входов третьего элемента И, выход которого подключен ко входу усилителя мощности и ко второму входу второго элемента И, подсоединенного третьим входом через второй резистор к первой шине паитания, а входные шины сигналов исходного состояния и обратного хода соединены с четвертым элементом И, подключенным к первому из входов пятого элемента И, выход которого соединен непосредственно и через включенные последовательно третий фазоинвертор и третий резистор соответственно с первым и вторым входами шестого элемента И, подсоединенного ко второму входу третьего элемента И. При этом входные шины сигналов окончания магнитной ленты и прямого хода соединены с седьмым элементом И, подключенным ко второму входу пятого элемента И, а вторая шина питания соединена через первый и второй конденсаторы со вторыми входами соответственно первого и шестого элементов И. На чертеже показан один из возможных вариантов предложенного устройства для управления прижимным роликом лентопротяжного механизма. Предложенное устройство содержит усилитель 1 мощности, выход которого соединен с узлом 2 прижима-отвода, на котором установлен прижимной ролик 3. Прижимной ролик 3 установлен на узле 2 прижима-отвода с возможностью обеспечения сопряжения магнитной ленты с ведущим валом 4 лентопротяжного механизма. Устройство содержит также датчик 5 отвода, кинематически соединенный с прижимным роликом 3 и подключенный ко входу первого фазоинвертора 6. Выход первого фазоинвертора 6 соединен непосредственно и через включенные последовательно второй фазоинвертор 7 и первый резистор 8 соответственно с первым и вторым входами первого элемента И 9. Первый элемент И 9 подключен к первому из входов второго элемента И 10, соединенного с первым из входов третьего элемента ИИ. Выход третьего элемента И 11 подключен ко входу усилителя 1 мощности и ко второму входу второго элемента И 10, подсоединенного третьим входом через второй резистор 12 к первой шине 13 питания. В предложенном устройстве входная шина 14 сигнала исходного состояния и входная шина 15 сигнала обратного хода соединены с четвертым элементом И 16 подключенным к первому из входов пятого элемента И 17. Выход пятого элемента И 17 соединен непосредственно и через включенные последовательно третий фазоинвертор 18 и третий резистор 19 соответственно с первым и вторым входами шестого элемента И 20, подсоединенного ко второму входу третьего элемента И 11. Входная шина 21 сигнала окончания магнитной ленты и входная шина 22 сигнала
прямого хода соединены с седьмым элементом И 23, подключенным ко второму входу пятого элемента И 17. Кроме того, вторая
динен непосредственно и через включенные последовательно третий фазоинвертор и третий резистор соответственно с первым и шина 24 питания соединена через первый и второй конденсаторы 25 и 26 со вторыми входами соответственно первого и шестого элементоа И 9 и 20. В предложенном устройстве на первый вход третьего элемента И 11 подается результат обработки показаний датчика 5 отвода. На второй вход третьего элемента И 11 подается результат обработки информации, поступающей со входных шин 14, 15, 21 и 22 сигналов исходного состояния, обратного хода, окончания магнитной ленты и прямого хода. В соответствии с этим третий элемент И 11 формирует сигнал, который через усилитель 1 МОШ.НОСТИ поступает на узел 2 прижима-отвода, обеспечивающий отвод прижимного ролика 3 от ведущего вала 4 лентопротяжного механизма или прижим к нему. Использование изобретения позволяет в значительной степени уменьшить деформацию магнитной ленты и может найти применение в лентопротяжных механизмах аппаратуры магнитной записи. Формула изобретения Устройство для управления прижимным роликом лентопротяжного механизма, содержащее усилитель мощности, выход которого соединен с узлом прижима-отвода, на котором прижимной ролик установлен с возможностью обеспечения сопряжения магнитной ленты с ведущим валом лентопротяжного механизма, элементы И, фазоинверторы, конденсаторы, резисторы, входные шины сигналов прямого хода, обратного хода, исходного состояния и окончания магнитной ленты и шины питания, отличающееся тем, что, с целью уменьшения деформации магнитной ленты, в него введен датчик отвода, кинематически соединенный с прижимным роликом и подключенный ко входу первого фазоинвертора выход которого соединен непосредственно и через включенные последовательно второй фазоинвертор и первый резистор соответственно с первым и вторым- входами первого элемента И, подключенного к первому из входов второго элемента И, соединенного с первым из входов третьего элемента И, выход которого подключен ко входу усилителя мощности и ко второму входу второго элемента И, подсоединенного третьим входом через второй резистор к первой шине питания, а входные шины сигналов исходного состояния и обратного хода соединены с четвертым элементом И, подключенным к первому из входов пятого элемента И, выход которого соевторым входами шестого элемента И, подсоединенного ко второму входу третьего элемента И, причем входные шины сигналов окончания магнитной ленты и прямого хода соединены с седьмым элементом И, подключенным ко второму входу пятого элемен та И, а вторая шина питания соединена через первый и второй конденсаторы со вторыми входами соответственно первого и шестого элементов И.
Источники информации, принятые во внимание при экспертизе
