Изобретение относится к. высоко вольтному аппаратостроению и касает .ся конструктивного выполнения механизма управления высоковольтных аппаратов, например разъединителей и силовых выключателей. Известны механизмы управления .выключателей высокого напряжения, содержащие стержневой подвижный кон такт, направляющие устройства с под пружиненными роликами, которые олужат одновременно и токоотводом выключателя , и рычажную систему с выходным элементом, совершающим возвратно-поступательное движение при включении и отключении.выключа теля l . Однако эти механизмы и(4еют больш габариты и сложную к онструкцию. Наиболее близким к предлагаемому по технической сущности и дости гаемому эффекту при использовании является механизм управления выклю чателя. В этом механизме, содержащем корпус, неподвижный контакт, подвижный стержневой контакт, напр ляющее устройство с вращающимися подпружиненными роликами, зафиксированными в обойме, и рычажную сис му с выходным элементом, совершающим возвратно-поступательное движение при включении и отключении выключателя, указанный выходной элемент соединен непорредственно с подвижным контактом. Таким образом, перемещение выходного элемента рычсшной системы равняется ходу подвижного контакта 2. Недостаткеми этого механизма управления являются большие габариты и сложность конструкции. Большие габариты обусловлены большим ходом выходногоэлемента рычажной система, увеличинагацимся с ростом номингшьного напряжения аппарата. Сложность конструкции вызвана тем/ что в электрических аппаратах высокого напряжения рычажные системы механизмов управления имеют большую разницу перемещений выходного элемента, связанного с подвижным контактом, и входного элемента, связанного с приводом. Отношение этих перемещений находится в пределах 2 - 7 в зависимости от класса напряжения аппарата и его конструктивных особенностей. При возможном повороте вала рычажного механизма, который конструктивно ограничивается углом 90-110, указанное отношение перемеТцений выходного и входного элементо приводит к необходимости применения дополнительных (промежуточных) рычажных систем или рычагов с большим плечом, что требует больших габаритов для размещения механизмов и усложняет конструкцию, при этом большая масса рычагов или увеличен ное количество звеньев рычажной передачи требуют большой мощности привода.
Цель изобретения - уменьшение габаритов и упрощение конструкции механизма управления высоковольтного аппарата. .
Указанная цель достигается тем, что в механизме управления высоковольтного аппарата, содержащем подвижный стержневой контакт, направ ляющее устройство с подпружиненными вращающимися роликами, зафиксированными в общей обойме, и рычажную систему с выходным элементом, совершающим возвратно-поступательное движение при включении и отключении аппарата, выходной элемент закреплен на обойме направляющего устройства, передавая тем самым движение через неё и ролики стержневому контакту.
С целью обеспечения более точной величины хода при многократном оперировании механизм может быть снабжён упорами, для фиксации крайних положений подвижного контакта, один из которых расположен, напримев неподвижном контакте и фиксирует включенное положение, а другой расположен, например, в корпусе механизма и фиксирует отключенное положение контакта; при.этом ход подЪижного контакта меньшеудвоенного хода выходного элемента механизма н величину проскальзывания роликов.
С целью снижения паразитных сил трения в узле роликового токротвода ролики могут быть снабжены подшипниками качения.
Закрепление выходного элемента механизма управления непосредственн на обойме направляющего устройства и передача таким образом движения стержневому контакту через вращакщися ролики позволяет получить удвоенное перемещение стержневого контакта по сравнению с перемещением выходного элемента рычажной системы за счет удвоения линейной скорости точки касания ролика с контактом, по сравнению со скоростью оси роли.ка, согласно закону механизма о мгнвенном центре вращения.
Соответственно .уменьшается и отношение перемещений выходного и. входного элементов рычгданой системы что позволяет умеввшить габариты рычагов и корпусных деталей и всего механизма, а в отдельных случаях отказаться от промежуточных
рычажных систем и упростить конструкцию.
Установка упоров, фиксирующих крайние положения контакта, благод. ря чему происходит проскальзывание роликов в конце хода при включении и отключении выключателя, обеспечивает соответствие крайних положений выходного рычажной системы и контакта, исключая их взаимное смещение в конечных положениях, и одновременно способствует эффективному торможению подвижного контакта в концехода за счет резкого увеличения трения роликов при скольжении
Установка подшипников качения в контактных роликах увеличивает КПД механизма управления.
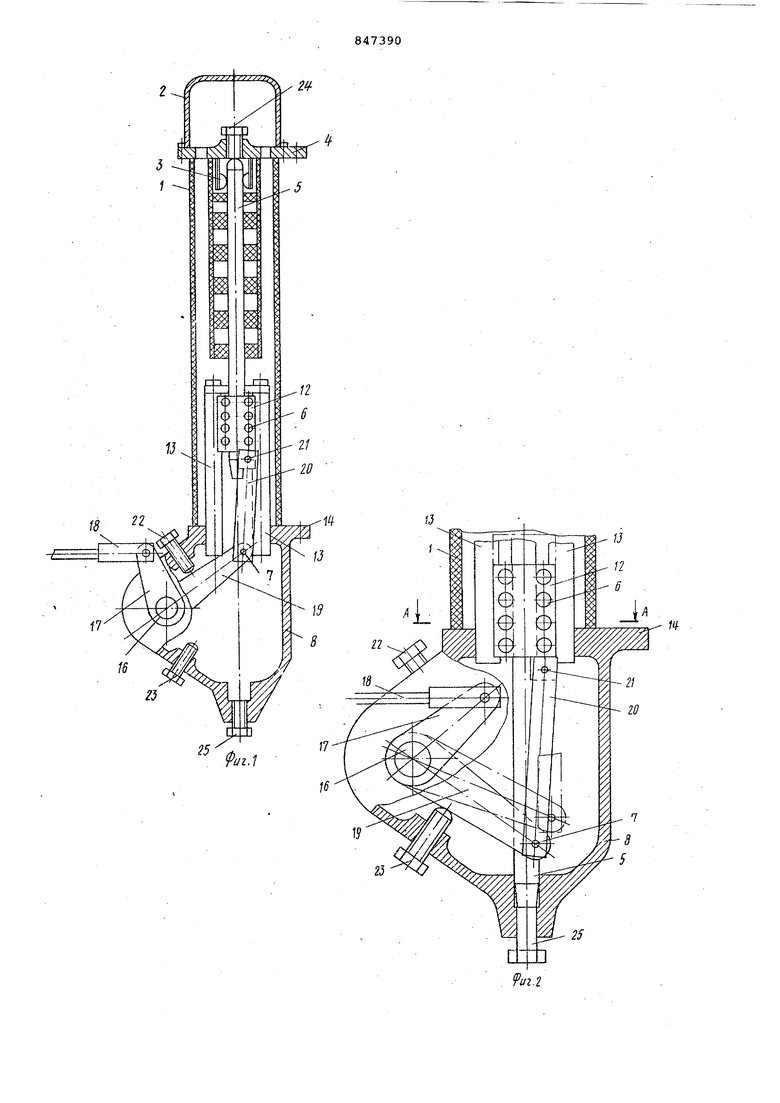
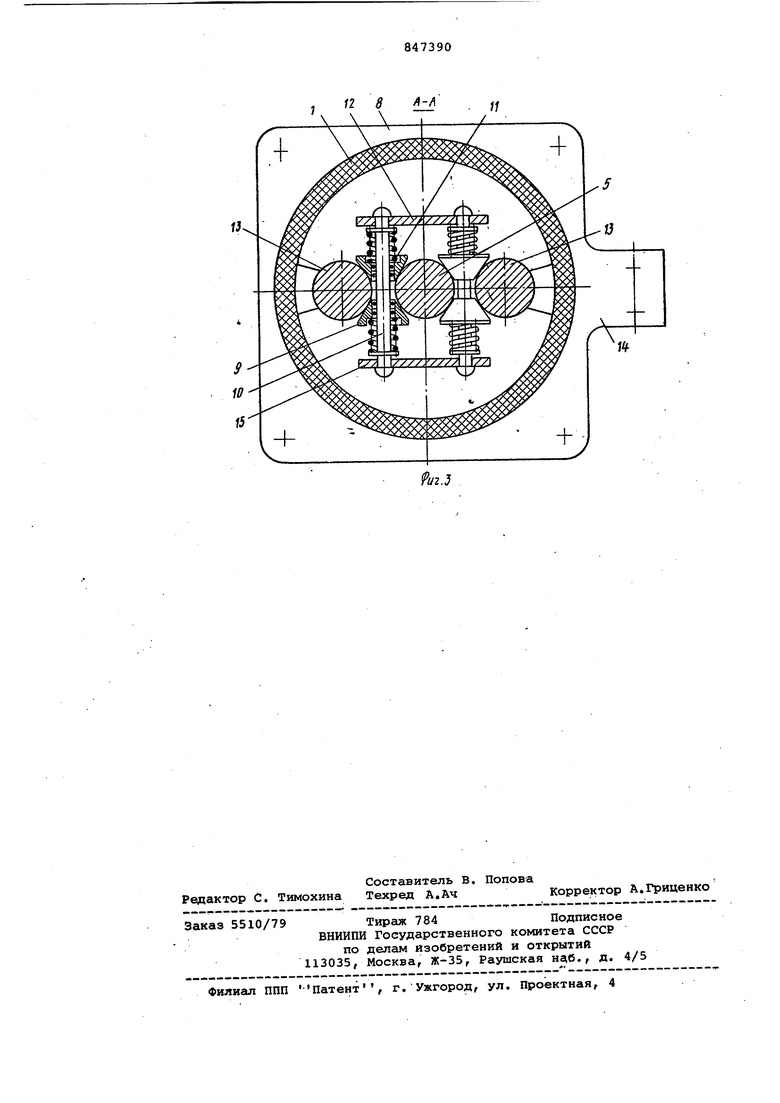
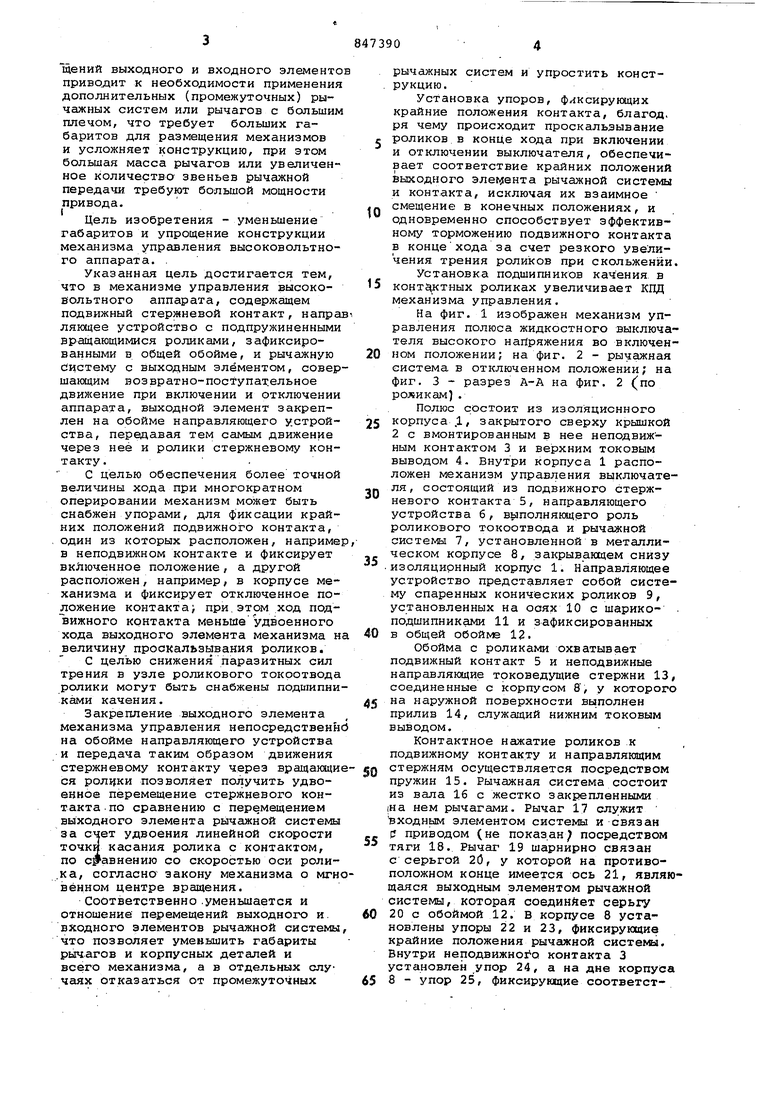
На фиг. 1 изображен механизм управления полюса жидкостного выключателя высокого найряжения во включенном положении; на фиг. 2 - рычажная система в отключенном положении; на фиг. 3 - разрез А-А на фиг. 2 (по роликам).
Полюс состоит из изоляционного корпуса .1, закрытого сверху крышкой 2 с вмонтированным в нее неподвижным контактом 3 и верхним токовым выводом 4. Внутри корпуса 1 расположен механизм управления выключателя, состоящий из подвижного стержневого контакта 5, направляющего устройства 6, выполняющего роль роликового токоотвода и рычажной системы 7, установленной в металлическом корпусе 8, закрывающем снизу изоляционный корпус 1. Направляющее устройство представляет собой систему спаренных конических роликов 9, установленных на ооях 10 с шарикоподшипниками 11 и зафиксированных в общей обой1 е 12Обойма с роликами охватывает подвижный контакт 5 и неподвижные направлякядие токоведущие стержни 13 соединенные с корпусом 8, у которог на наружной поверхности выполнен прилив 14, служащий нижним токовым выводом.
Контактное нажатие роликов к подвижному контакту и направляющим стержням осуществляется посредством пружин 15. Рычажная система состоит из вала 16 с жестко закрепленными |На нем рычагами. Рычаг 17 служит входным элементом системы и связан р приводом (не показ.ан посредством тяги 18. Рычаг 19 шарнирно связан с серьгой 20, у которой на противоположном конце имеется ось 21, являющаяся выходным элементом рычажной системы, которая соединйет серьгу 20 с обоймой 12. В корпусе 8 установлены упоры 22 и 23, фиксирующие крайние положения рычажной системы. Внутри неподвижно1 о контакта 3 установлен упор 24, а на дне корпуса 8 - упор 25, фиксирующие соответственно включенное и отключенное положение подвижного контакта 5.
Механизм работает следующим образом.
При отключении выключателя под действием привода тяга 18 перемещает входной элемент - рычаг 17 рычажной системы, повора ивая при этом вал 16 по часовой стрелке, и передавая движение через рычаг 19 серьге 20.Выходной элемент - .ось 21, соединяющий серьгу 20 непосредственно с обоймой 12, передает движение роликам 9, вращающимся на осях 10, которые зафиксированы в обойме. Ролики 9, пе рекатываясь по неподвижным направляющим стержням 13 благодаря силам сцепления, обусловленным нажатием пружины 15, перемещают стержневой контакт 5 вниз. При. этом в каждый момент ролик поворачивается с некоторой угловой скоростйю относительно своего мгновенного центра вращения - точки прикосновения с неподвижным направляющим стержнем, благодаря чему линейная скорость перемещения точки соприкосновения ролика с подвижным стержневым контактом, которая удалена от мгновенного центр вращения на двойное.расстояние по сравнению с осью ролика, соответстве ио в два раза больше линейной скорости перемещения оси ролика. Таким образом, обеспечивается удвоение перем.ещения стержневого контакта ао сравнению с перемещением обоймы d связанного с ней выходного элемента рычажной системы. В конце хода отключения стержневой контакт 5 , встречается с упором 25 и останавливается, в это время рычаг 19 еще ие достигает упора 23 (это положеиие лзображено пунктиром и продолжает перемещаться до соприкосновенияс ним, обуславливая в этот отрезок времени скольжение роликов по остановившемуся во включенном положении стержневому контакту.. При включении в конце хода стержневой контакт 5 встречается с упором 24 и остандвлйвается. В это время рычаг 19 еще не достигает упора 22 и продолжает перемещаться до соприкосновения с ним, обуславливая в этот отрезок времени скольжение роликов по остановившемуся в отклитченном положении стержневому контакту.
Таким образом, обеспечивается четкая фиксация подвижного контакта и рычажной системы в крайних положениях механизма и стабильное взаиморасположение стержневого контакта и обоймы с роликами в этих положения Полный ход подвижного контакта при этом получается меныле удвоенного хода выходного элемента рычажной системы на величину проскальзывания роликов, при котором происходит эффективное торможение ПОДВИЖНЕЛХ
частей механизма за счет трения скольжения в узле роликового токоотвода, что предохраняет мехайизм от воздействия вредных ударных нагрузок.
Данный механизм управления, у которого движение передается от вы:ХОднрго элемента рычс1жной системы к подвижному контакту через вращаю:щиеся ролики, позволяет эффективно |осуществить преобразование малого хода привода в требуе1«1й большой ход
0 контакта за счет использования имеюще|1гося в аппарате элемента - р6;1ико.його токоотвода, позволяя уменьшить габариты рычажной системы или отказаться от ее промежуточных элементов,
s благодаря чему можно существенно упростить конструкцию, уменьшить габариты и,мощность привода.
Предлагаемый механизм может быть применен с наибольшим эффектом в
0 .выключателях и разъединителях на |высокое напряжение.
Формула изобретения
- 1. Механизм управления высоко- 1
5 волвтного аппарата, содержащий кор|Пус, неподвижный контакт, подвижный стержневой контакт, направляющее ;устройство с подпружиненными вращающимися токоведущими роликами, зафиксированными в общей обойме, и
0 рычажную систему с выходным элементом, совершающим возвратно-поступательное движение при включении и отключении аппарата, отличающийся тем, что, с целью умень5шения габаритов и упрощения конструкции, выходной элемент закреплен на обойме направляющего устройства, которая через ролики передает движение подвижному контакту.
0
2.Механизм по п. 1, о т я и ч аю щ и и с я тем, что , с целью обеспечения более точной величины хода при многократном оперировании он снабжен упорами, фиксирующими крайSние положения подвижного контакта, один из котоЕжлх расположен, например, в неподвижном контакте для фиксации включённого положения, а второй - например в корпусе механизма для фиксации отключенного положеOния, при этом ход подвижного контакта выбран меньше удвоенного хода выходного элемента на величину проскальзывгшия роликов.
3.Механизм по п. 1/ о т л и ч а
5 ю щ и и с я тем, что, с целью повышё,ния КПД механизма, ролики снабжены подшипниками качения.
Источники информации, принятые во внимание при экспертизе
О
1.Афанасьев В.В. Конструкция выключающих высокого напряжения. Mi, Энергия, 1969, рис. .
2.ASEA JournaC Votume 49 2 la. 31, фиг. 6 а, 1976. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Выключатель высокого напряжения | 1975 |
|
SU570119A2 |
| Жидкостный выключатель высокого напряжения | 1980 |
|
SU898529A1 |
| Выключатель высокого напряжения | 1980 |
|
SU888234A2 |
| ПРУЖИННЫЙ ПРИВОД ДЛЯ ВЫСОКОВОЛЬТНОГО КОММУТАЦИОННОГО АППАРАТА | 2005 |
|
RU2291512C1 |
| ВЫСОКОВОЛЬТНЫЙ ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ НАГРУЗКИ | 2003 |
|
RU2247439C1 |
| ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ НАГРУЗКИ | 2012 |
|
RU2529501C2 |
| Выключатель высокого напряжения | 1983 |
|
SU1117726A1 |
| ОДНОПОРШНЕВОЙ ТРЕХПОЛЮСНЫЙ ВЫКЛЮЧАТЕЛЬ НАГРУЗКИ | 1993 |
|
RU2037228C1 |
| Привод электрического выключателя | 1991 |
|
SU1800491A1 |
| Высоковольтный вакуумный выключатель | 1983 |
|
SU1144157A1 |