(54) ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА ВО ВРЕМЕННОЙ ИНТЕРВАЛ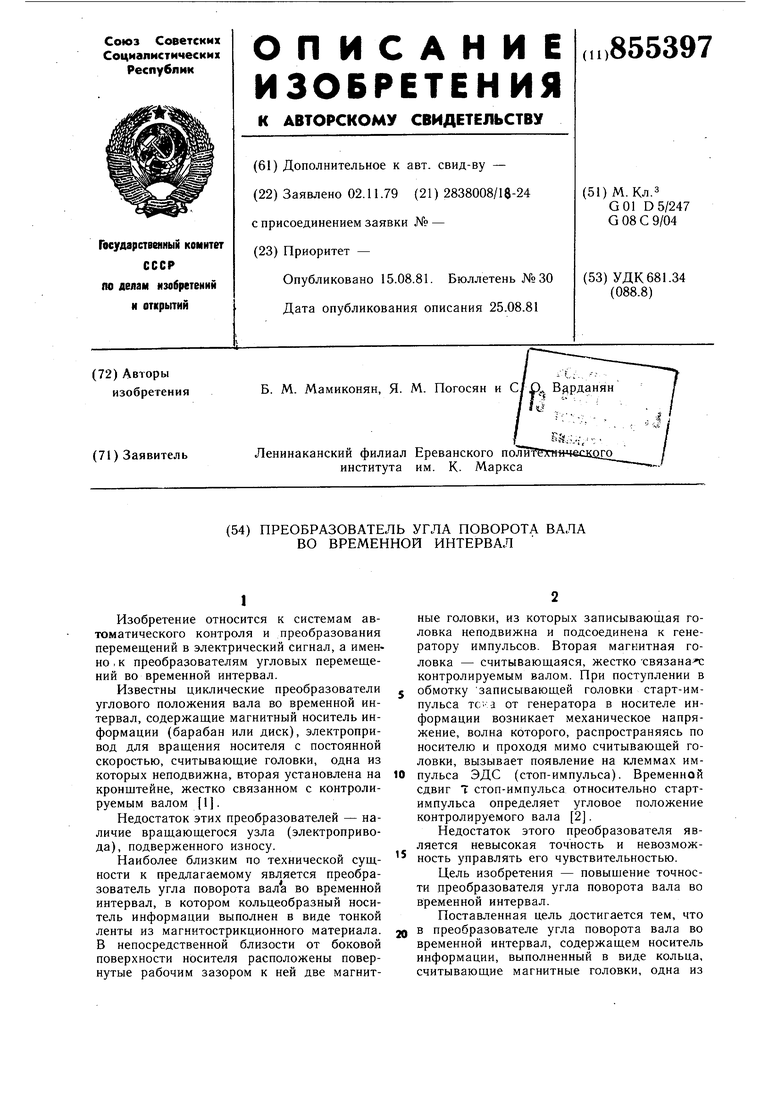
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1997 |
|
RU2137296C1 |
| СПОСОБ МАГНИТНОЙ РЕДУКЦИИ И ПРЕОБРАЗОВАТЕЛЬ УГОЛ - КОД, РЕАЛИЗУЮЩИЙ ЕГО | 1994 |
|
RU2115228C1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1280700A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU842899A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1410273A1 |
| Генератор цилиндрических магнитных доменов | 1977 |
|
SU720506A1 |
| Функциональный преобразователь угла поворота вала | 1979 |
|
SU942094A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ В КОД | 2009 |
|
RU2400014C1 |
| Генератор цилиндрических магнитных доменов | 1977 |
|
SU705516A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДВИЖЕНИЕМ ПЛОСКИХ МАГНИТНЫХ ДОМЕНОВ | 1994 |
|
RU2084971C1 |
1
Изобретение относится к системам автоматического контроля и преобразования перемещений в электрический сигнал, а именно , к преобразователям угловых перемещений во временной интервал.
Известны циклические преобразователи углового положения вала во временной интервал, содержащие магнитный носитель информации (барабан или диск), электропривод для вращения носителя с постоянной скоростью, считывающие головки, одна из которых неподвижна, вторая установлена на кронштейне, жестко связанном с контролируемым валом 1.
Недостаток этих преобразователей - наличие вращающегося узла (электропривода), подверженного износу.
Наиболее близким по технической сущности к предлагаемому является преобразователь угла поворота вала во временной интервал, в котором кольцеобразный носитель информации выполнен в виде тонкой ленты из магнитострикционного материала. В непосредственной близости от боковой поверхности носителя расположены повернутые рабочим зазором к ней две магнитные головки, из которых записывающая головка неподвижна и подсоединена к генератору импульсов. Вторая магнитная головка - считывающаяся, жестко -связана контролируемым валом. При поступлении в обмотку записывающей головки старт-импульса тс-а от генератора в носителе информации возникает механическое напряжение, волна которого, распространяясь по носителю и проходя мимо считывающей головки, вызывает появление на клеммах импульса ЭДС (стоп-импульса). Временной сдвиг стоп-импульса относительно стартимпульса определяет угловое положение контролируемого вала 2.
Недостаток этого преобразователя является невысокая точность и невозможность управлять его чувствительностью.
Цель изобретения - повышение точности преобразователя угла поворота вала во временной интервал.
Поставленная цель достигается тем, что
20 в преобразователе угла поворота вала во
временной интервал, содержащем носитель
информации, выполненный в виде кольца,
считывающие магнитные головки, одна из
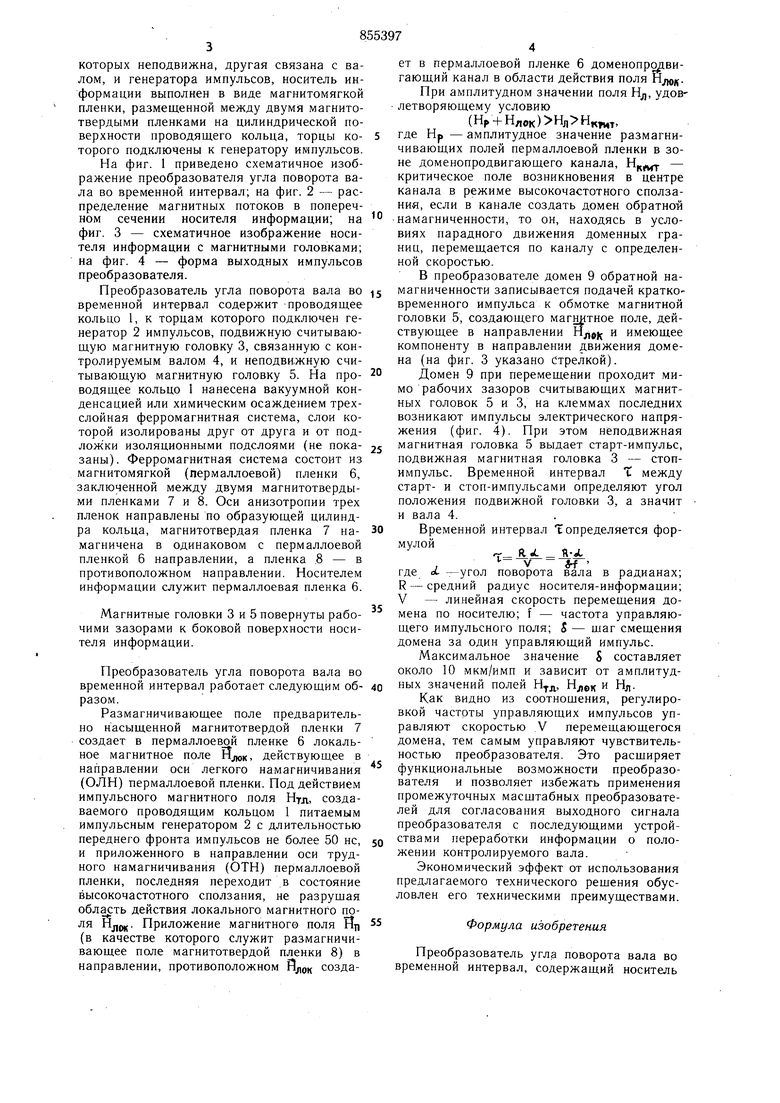
которых неподвижна, другая связана с валом, и генератора импульсов, носитель информации выполнен в виде магнитомягкой пленки, размещеннЬй между двумя магнитотвердыми пленками на цилиндрической поверхности проводящего кольца, торцы которого подключены к генератору импульсов. На фиг. 1 приведено схематичное изображение преобразователя угла поворота вала во временной интервал; на фиг. 2 - распределение магнитных потоков в поперечном сечении носителя информации; на фиг. 3 - схематичное изображение носителя информации с магнитными головками; на фиг. 4 - форма выходных импульсов преобразователя. Преобразователь угла поворота вала во временной интервал содержит проводящее кольцо 1, к торцам которого подключен генератор 2 импульсов, подвижную считывающую магнитную головку 3, связанную с контролируемым валом 4, и неподвижную считывающую магнитную головку 5. На проводящее кольцо 1 нанесена вакуумной конденсацией или химическим осаждением трехслойная ферромагнитная система, слои которой изолированы друг от друга и от подложки изоляционными подслоями (не показаны). Ферромагнитная система состоит из магнитомягкой (пермаллоевой) пленки 6, заключенной между двумя магнитотвердыми пленками 7 и 8. Оси анизотропии трех пленок направлены по образующей цилиндра кольца, магнитотвердая пленка 7 намагничена в одинаковом с пермаллоевой пленкой 6 направлении, а пленка .8 - в противоположном направлении. Носителем информации служит пермаллоевая пленка 6. Магнитные головки 3 и 5 повернуты рабочими зазорами к боковой поверхности носителя информации. Преобразователь угла поворота вала во временной интервал работает следующим образо.м. Размагничивающее поле предварительно насыщенной магнитотвердой пленки 7 создает в пермаллоевой пленке 6 локальное магнитное поле , действующее в направлении оси легкого намагничивания (ОЛН) пермаллоевой пленки. Под действием импульсного магнитного поля Нул, создаваемого проводящим кольцом 1 питаемым импульсным генератором 2 с длительностью переднего фронта импульсов не более 50 не, и приложенного в направлении оси трудного намагничивания (ОТН) пермаллоевой пленки, последняя переходит в состояние высокочастотного сползания, не разрушая область действия локального магнитного поля HjipK. Приложение магнитного поля Йц (в качестве которого служит размагничивающее поле магнитотвердой пленки 8) в направлении, противоположном Й(,ок создает в пермаллоевой пленке 6 доменопродвигающий канал в области действия поля И окПри амплитудном значении поля , удовлетворяющему условию
(Нр-f Нлок) .
где Нр - амплитудное значение размагничивающих полей пермаллоевой пленки в зоне доменопродвигающего канала, - критическое поле возникновения в центре канала в режиме высокочастотного сползания, если в канале создать домен обратной намагниченности, то он, находясь в условиях парадного движения доменных границ, перемещается по каналу с определенной скоростью.
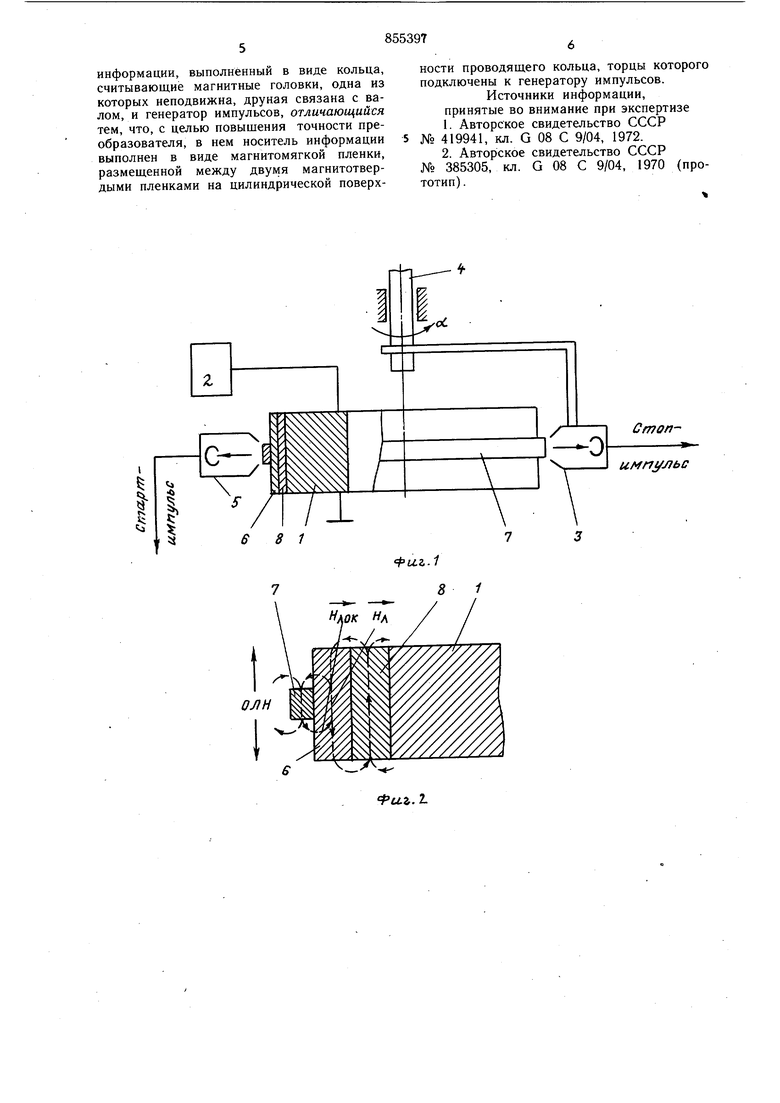
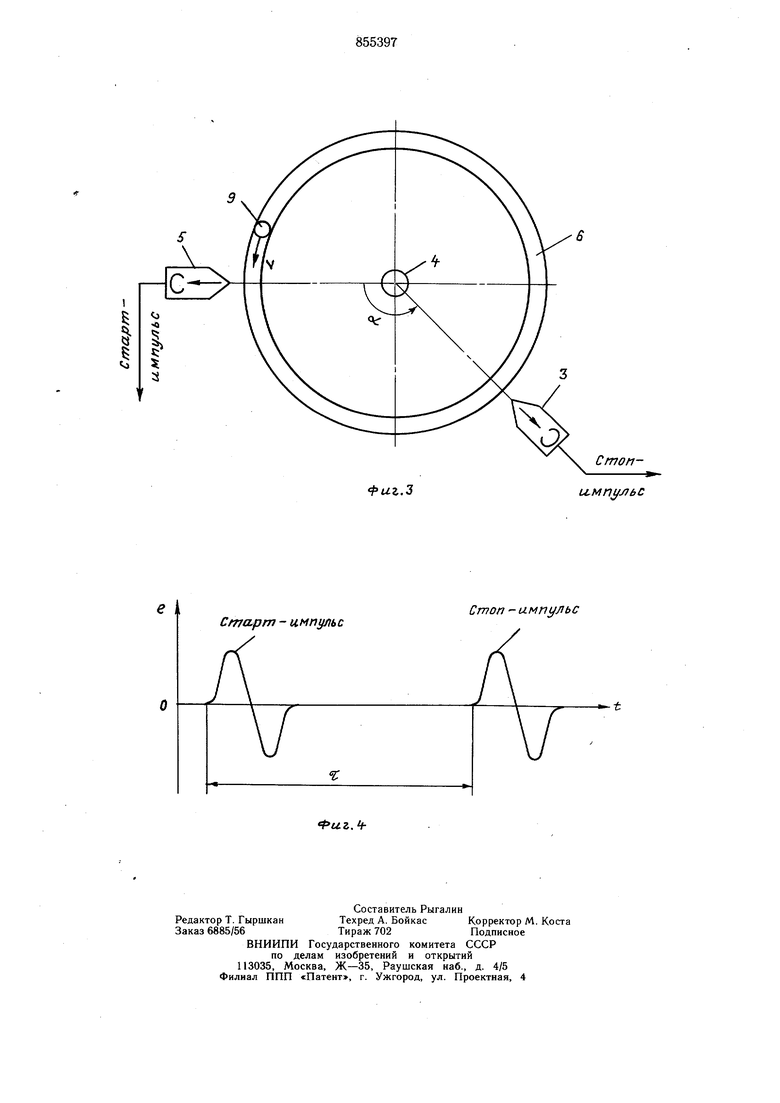
В преобразователе домен 9 обратной намагниченности записывается подачей краткоВременного импульса к обмотке магнитной головки 5, создающего магнитное поле, действующее в направлении и имеющее компоненту в направлении движения домена (на фиг. 3 указано Стрелкой). Домен 9 при перемещении проходит мимо рабочих зазоров считывающих магнитных головок 5 и 3, на клеммах последних возникают импульсы электрического напряжения (фиг. 4). При этом неподвижная магнитная головка 5 выдает старт-импульс, подвижная магнитная головка 3 - стопимпульс. Временной интервал Т между старт- и стоп-импульсами определяют угол положения подвижной головки 3, а значит и вала 4. Временной интервал Т определяется формулойт Я ,- У - 7гГ где - -угол поворота вала в радианах; R - средний радиус носителя-информации; V - линейная скорость перемещения домена по носителю; f - частота управляющего импульсного поля; S - шаг смещения домена за один управляющий импульс. Максимальное значение S составляет около 10 мкм/имп и зависит от амплитудных значений полей , Н и Hj,. Как видно из соотношения, регулировкой частоты управляющих импульсов управляют скоростью V перемещающегося домена, тем самым управляют чувствительностью преобразователя. Это расширяет функциональные возможности преобразователя и позволяет избежать применения промежуточных масщтабных преобразователей для согласования выходного сигнала преобразователя с последующими устройствами переработки информации о положении контролируемого вала. Экономический эффект от использования предлагаемого технического рещения обусловлен его техническими преимуществами. Формула изобретения Преобразователь угла поворота вала во временной интервал, содержащий носитель
информации, выполненный в виде кольца, считывающие магнитные головки, одна из которых неподвижна, друная связана с валом, и генератор импульсов, отличающийся тем, что, с целью повышения точности преобразователя, в нем носитель информации выполнен в виде магнитомягкой пленки, размещенной между двумя магнитотвердыми пленками на цилиндрической поверхности проводящего кольца, торцы которого подключены к генератору импульсов.
Источники информации, принятые во внимание при экспертизе
2,Авторское свидетельство СССР
№ 385305, кл. G 08 С 9/04, 1970 (прототип) .
If
ОЛИ
е
Старт - импульс
t
Стоп -импульс
Риг. f
