Изобретение относится к грузоподъемным механизмам, а именно к канатоукладчикам лебедок. Известен канатоукладчик, преимущественно для укладки каната, составленного из двух разных по диаметру отрезков, содержащий двухскоростную коробку передач, связывающую барабан лебедки с ходовым винтом канатоукладчика и переключаемую на другой шаг наматывания под действием внешнего сигнала управления 1. J. Наиболее близким решением из известных является канатоукладчик, преимущественно для укладки каната, составленного из двух разных по диаметру отрезков, содержащий двухскоростную планетарную коробку передач, состоящую из находящихся межд собой в зацеплении солнечного коле са, связанного с ходовым винтом каретки канатоукладчика, сателлита, установленного на водиле,связанном с барабаном, коронного колеса, соединяемого с тормозом под действием внешнего сигнала управления при пер ходе на больший шаг наматывания ка ната, и механизма, блокирующего ука занные элементы передачи при переходе на меньший щаг наматывания 2 Недостатком указанных канатоукладчиков является то, что переключение коробки передач на другой шаг наматывания каната осуществляется от внещнего сигнала управления в первом канатоукладчике ,- по прохождению утолщенного участка каната, а во втором - от сигнала счетчика оборотов барабана. И тот и другой способ- неизбежно приводят к рассогласованию между положением уложенного при наматывания каната и положения каретки канатоукладчика. Появление рассогласования таким образом является следствием способа получения сигнала на переключение.и является серьезным недостатком известных канатоукладчиков. Внесение рассогласования, накапливаясь, может привести к заклиниванию каната и аварийной остановки лебедки. Целью изобретенияявляется повышение надежности работы устройства. Для этого сателлит выполнен двухвенцовым, а механизм блокировки выполнен из дополнительного коронно- го колеса с торцовыми кулачками, находящегося в зацеплении с одним из венцов сате.плита, при этом основное юронное колесо также снабжено торцовыми кулачками с неравномерным шагом, обеспечивающим сцепление с кулачками дополнительного коронного колеса только в одном взаимном положении, и выполнено с возможностью осевого перемещения под действием внешнего сигнала управления и контакта при этом с тормозом.
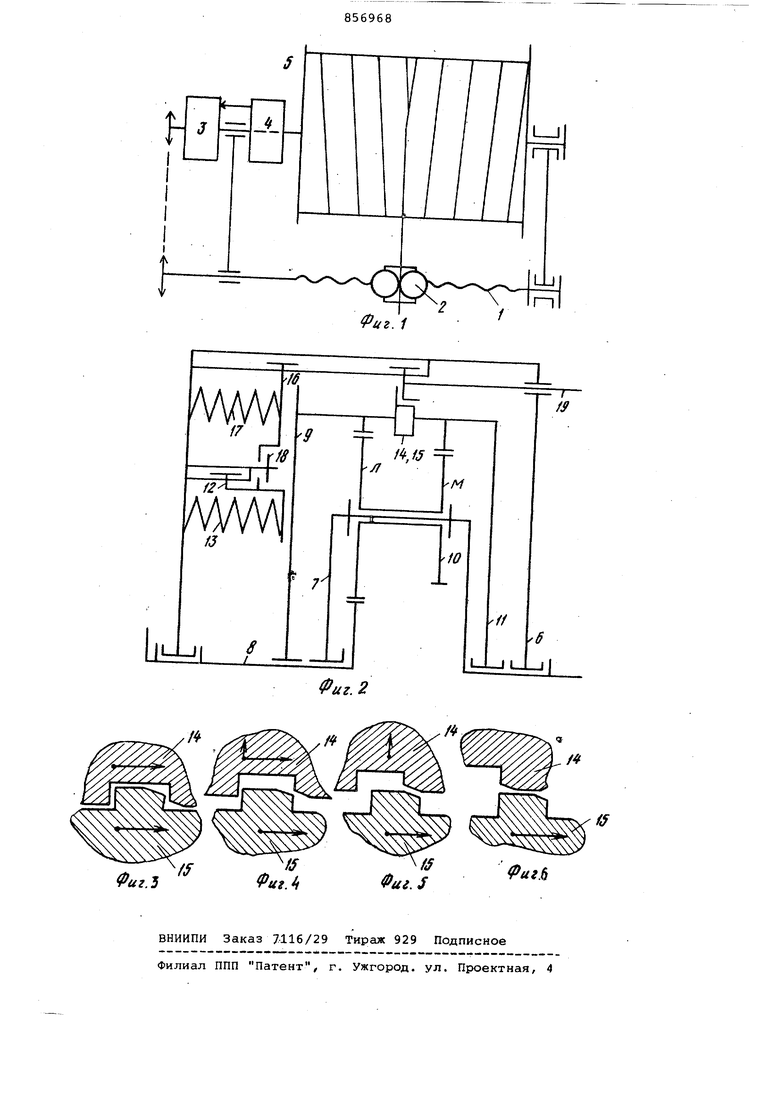
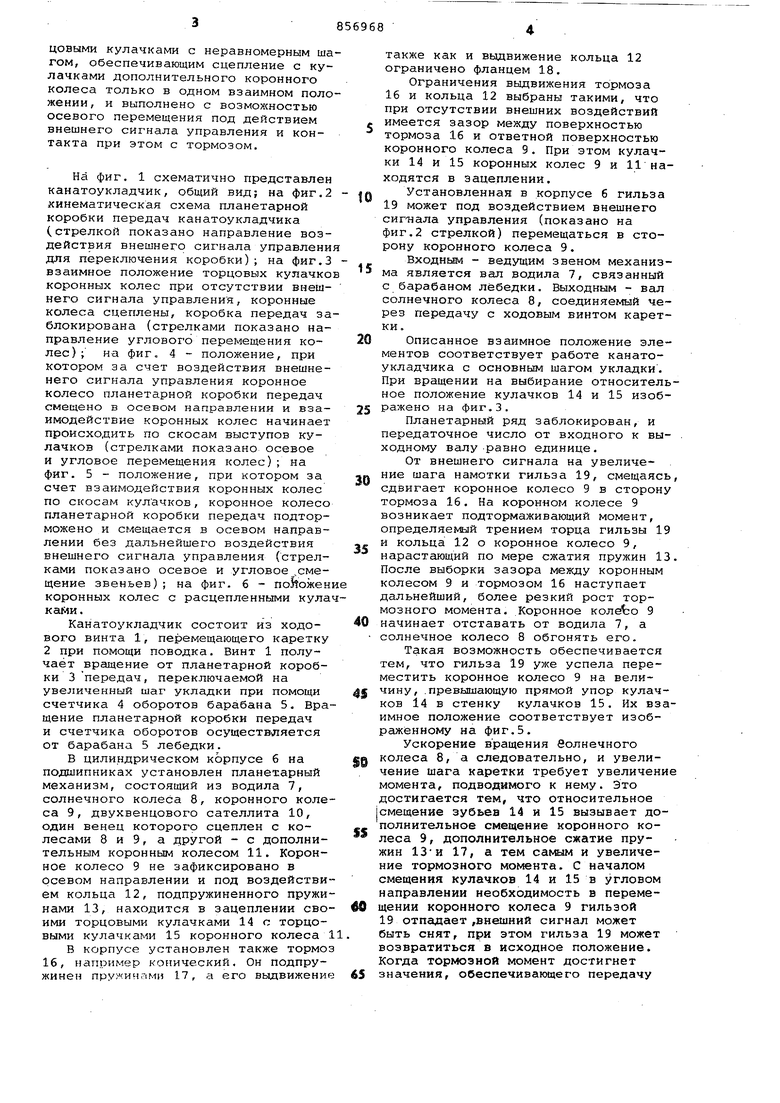
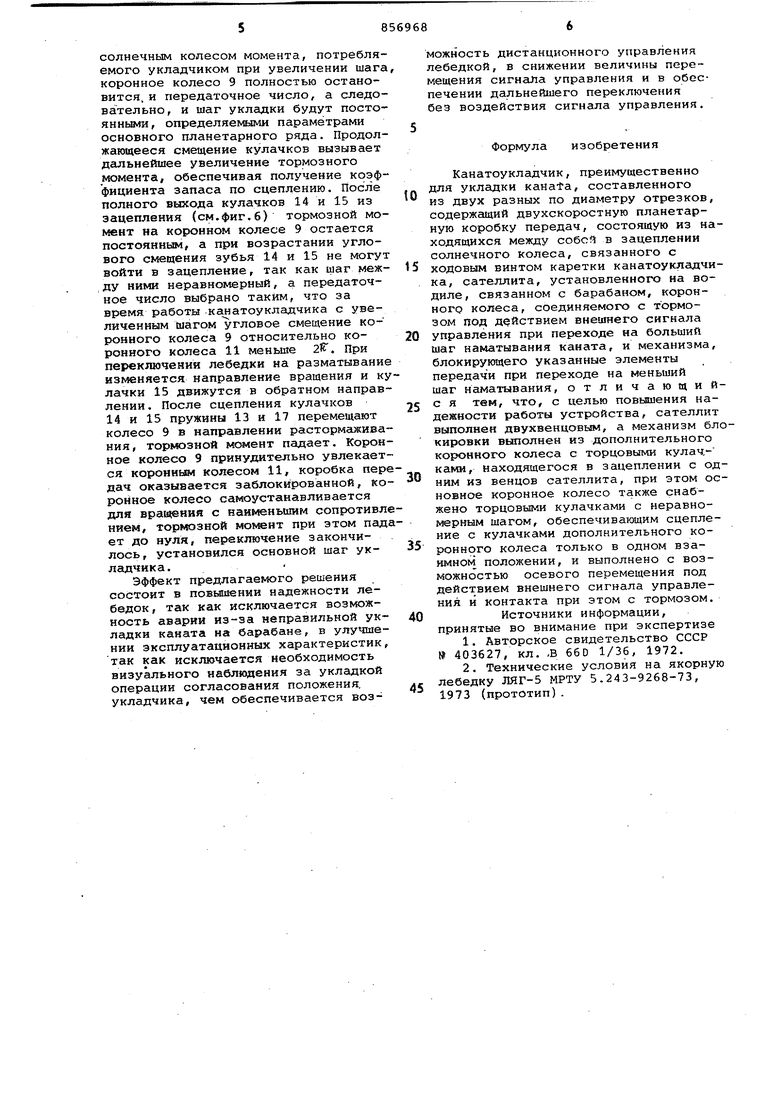
На фиг, 1 схематично представлен канатоукладчик, общий вид; на фиг,2 кинематическая схема планетарной коробки передач канатоукладчика (стрелкой показано направление воздействия внешнего сигнала управления для переключения коробки); на фиг,3 взаимное положение торцовых кулачков коронных колес при отсутствии внешнего сигнала управлений, коронные колеса сцеплены, коробка передач заблокирована (стрелками показано направление углового перемещения колес) ; на фиг. 4 - положение, при котором за счет воздействия внешненего сигнала управления коронное колесо планетарной коробки передач смещено в осевом направлении и взаимодействие коронных колес начинает происходить по скосам выступов кулачков (стрелками показано осевое и угловое перемещения колес); на фиг. 5 - положение, при котором за счет взаимодействия коронных колес по скосам кулачков, коронное колесо планетарной коробки передач подторможено и смещается в осевом направлении без дальнейшего воздействия внешнего сигнала управления (стрелками показано осевое и угловое ,смещение звеньев); на фиг. 6 - положени коронных колес с расцепленными кулачками,
Канатоукладчик состоит из ходового винта 1, перемещающего каретку 2 при помощи поводка, Винт 1 получает вращение от планетарной коробки 3 передач, переключаемой на увеличенный шаг укладки при помощи счетчика 4 оборотов барабана 5. Вращение планетарной коробки передач и счетчика оборотов осуществляется от барабана 5 лебедки.
В цилиндрическом корпусе 6 на подшипниках установлен планетарный механизм, состоящий из водила 7, солнечного колеса 8, коронного колеса 9, двухвенцового сателлита 10, один венец которого сцеплен с колесами 8 и 9, а другой - с дополнительным коронным колесом 11. Коронное колесо 9 не зафиксировано в осевом направлении и под воздействием кольца 12, подпружиненного пружинами 13, находится в зацеплении своими торцовыми кулачками 14 с торцовыми кулачками 15 коронного колеса 1
В корпусе установлен также тормоз 16, например конический. Он Подпружинен пружинами 17, а его выдвижение
также как и выдвижение кольца 12 ограничено фланцем 18.
Ограничения выдвижения тормоза 16 и кольца 12 выбраны такими, что при отсутствии внешних воздействий имеется зазор между поверхностью тормоза 16 и ответной поверхностью коронного колеса 9. При этом кулачки 14 и 15 коронных колес 9 и 11 находятся в зацеплении.
Установленная в корпусе 6 гильза 19 может под воздействием внешнего сигнала управления (показано на фиг.2 стрелкой) перемещаться в сторону коронного колеса 9.
Входным - ведущим звеном механизма является вал водила 7, связанный с барабаном лебедки. Выходным - вал солнечного колеса 8, соединяемый через передачу с ходовым винтом каретки.
Описанное взаимное положение элементов соответствует работе канатоукладчика с основным шагом укладки. При вращении на выбирание относительное положение кулачков 14 и 15 изображено на фиг.З,
Планетарный ряд заблокирован, и передаточное число от входного к выходному Вс1лу-равно единице.
От внешнего сигнала на увеличение шага намотки гильза 19, смещаясь сдвигает коронное колесо 9 в сторону тормоза 16. На коронном колесе 9 возникает подтормаживающий момент, определяемой трением торца гильзы 19 и кольца 12 о коронное колесо 9, нарастающий по мере сжатия пружин 13 После выборки зазора между коронным колесом 9 и тормозом 16 наступает дальнейший, более резкий рост тормозного момента. Коронное колено 9 начинает отставать от водила 7, а солнечное колесо 8 обгонять его.
Такая возможность обеспечивается тем, что гильза 19 уже успела переместить коронное колесо 9 на величину, .превышающую прямой упор кулачков 14 в стенку кулачков 15, Их взаимное положение соответствует изображённому на фиг,5.
Ускорение вращения болнечного колеса 8, а следовательно, и увеличение шага каретки требует увеличени момента, подводимого к нему. Это достигается тем, что относительное смещение зубьев 14 и 15 вызывает дополнительное смещение коронного колеса 9, дополнительное сжатие пружин 13-и 17, а тем самым и увеличение тормозного момента. С началом смещения кулачков 14 и 15 в угловом направлении необходимость в перемещении коронного колеса 9 гильзой 19 отпадает ,внешний сигнал может быть снят, при этом гильза 19 может возвратиться в исходное положение. Когда тормозной момент достигнет значения, обеспечивающего передачу
солнечным колесом момента, потребляемого укладчиком при увеличении шага коронное колесо 9 полностью остановится, и передаточное число, а следовательно, и шаг укладки будут постоянными, определяемыми параметрами основного планетарного ряда. Продолжающееся смещение кулачков вызывает дальнейшее увеличение тормозного момента, обеспечивая получение коэффициента запаса по сцеплению. После полного выхода кулачков 14 и 15 из зацепления (см.фиг.6) тормозной момент на коронном колесе 9 остается постоянн1№1, а при возрастании углового смещения зубья 14 и 15 не могут войти в зацепление, так как шаг между ними неравномерный, а передаточное число выбрано таким, что за время работы канатоукладчика с увеличенным шагом 1;гловое смещение коровного колеса 9 относительно коронного колеса 11 меньше 2R, При переключении лебедки на разматывание изменяется направление вращения и кулачки 15 движутся в обратном направлении. После сцепления кулачков 14 и 15 пружины 13 и 17 перемещают колесо 9 в направлении растормаживания, тормозной момент падает. Коронное колесо 9 принудительно увлекается корониьвл колесом 11, коробка передач оказывается заблокированной, коронное колесо самоустанавливается для вращения с наименьшим сопротивлением, ториюзной момент при этом падает до нуля, переключение закончилось , установился основной шаг укладчика.
Эффект предлагаемого решения состоит в повышении надежности лебедок , так как исключается возможность аварии из-за неправильной укладки каната на барабане, в улучшении эксплуатационных характеристик, так как исключается необходимость визуального наблюдения за укладкой операции согласования положения, укладчика, чем обеспечивается возможность дистанционного управления лебедкой, в снижении величины перемещения сигнс1Ла управления и в обеспечении дальнейшего переключения без воздействия сигнала управления.
Формула изобретения
Канатоукладчик, преимущественно для укладки кана±а, составленного
o из двух разных по диаметру отрезков, содержащий двухскоростную планетарную коробку передач, состоящую из находящихся между собой в зацеплении солнечного колеса, связанного с
s ходовым винтом каретки канатоукладчика, сателлита, установленного на водиле, связанном с барабаном, коронного колеса, соединяемого с тормозом под д« йствием внешнего сигнала
0 управления при переходе на больший шаг наматывания каната, и механизма, блокирующего указанные элементы передачи при переходе на меньший шаг наматывания, отличающийс я тем, что, с целью повьшения на5дежности работы устройства, сателлит выполнен двухвенцовым, а механизм блокировки выполнен из дополнительного коронного колеса с торцовыми кулачками, находящегося в зацеплении с од0ним из венцов сателлита, при этом основное коронное колесо также снабжено торцовыми кулачками с неравномерным шагом, обеспечивающим сцепление с кулачками дополнительного ко5ронного колеса только в одном взаимном положении, и выполнено с возможностью осевого перемещения под действием внешнего сигнала управления и контакта при этом с тормозом.
0
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 403627, кл. -В 66D 1/36, 1972.
2.Технические условия на якорную лебедку ЛЯГ-5 МРТУ 5.243-9268-73,
5 1973 (прототип).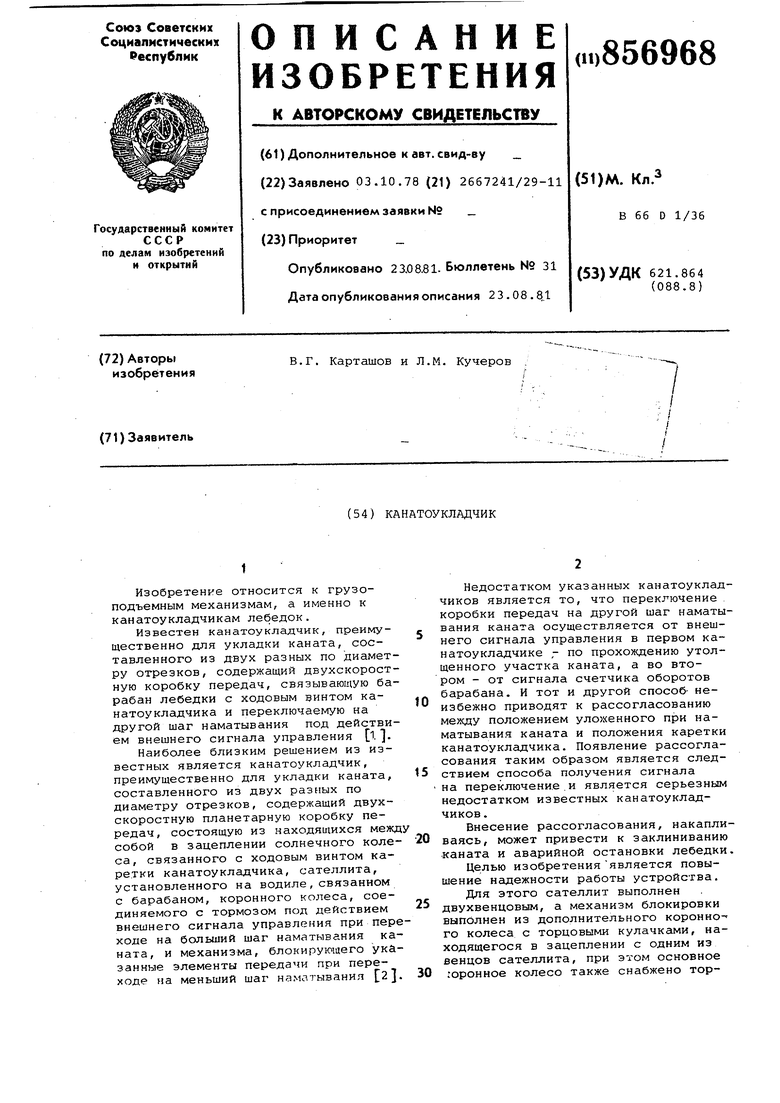
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВАЯ ЛЕБЕДКА | 1994 |
|
RU2081053C1 |
| ГРУЗОВАЯ ЛЕБЕДКА | 1996 |
|
RU2096309C1 |
| ЛЕБЕДКА С ПРИВОДОМ ОТ РАЗДАТОЧНОЙ КОРОБКИ ТРАНСПОРТНОГО СРЕДСТВА ТИП КАМЛЮКА | 1997 |
|
RU2179948C2 |
| Планетарная коробка передач | 2017 |
|
RU2646982C1 |
| МОДУЛЬНАЯ ПЛАНЕТАРНАЯ КОРОБКА ПЕРЕДАЧ | 2005 |
|
RU2298713C1 |
| ТЯГОВАЯ ЛЕБЕДКА | 2002 |
|
RU2225350C2 |
| ГИДРОМОТОР-КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2038226C1 |
| МОДУЛЬНАЯ АВТОМАТИЧЕСКАЯ СТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ КОРОБКА ПЕРЕДАЧ | 2012 |
|
RU2514381C1 |
| ЛЕБЕДКА | 2001 |
|
RU2192385C1 |
| МЕХАНИЗМ ПОВОРОТА | 1994 |
|
RU2083474C1 |