(54) ДАТЧИК УСКОРЕНИЯ Изобретение относится к измеритель ной технике, и в частности к устройствам для измерения ускорения при про ведении весовых измерений в аэродинамических трубах кратковременного действия. Известны датчики ускорения или акселерометры в виде упругого элемента с массой, причем упругий элемент имеет вид плоской балочки, по обе стороны которой наклеены тензорезисторные преобразователи l. Для достижения высоких собственных частот колебаний датчиков ускорения, т.е. быстродействия, их балочки делают достаточно жесткими, а массы небОЛЬШИ1 Ш. Недостатком таких датчиков ускорения с проволочными тензорезисторами является низкая чувствительность, так как для обеспечения собственной частоты датчиков ускорения порядка 1000 Гц и выше упругий элемент его выполняется таким жестким, что сигналы имеют величину порядка всего десятков микровольт. Применение полу проводниковых тензорезисторов могло бЫ обеспечить требуемую чувствительность, но они имеют большие температурные погрешности, .а ограниченные габариты балочки не позволяют осуществить эффективную термокомпенсацию. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является датчик ускорения, содержащий инерционную массу и дифференциальные магнитоанизотропные преобразователи с взаимоперекрещивающимися обмотками на общем магнитопроводе в виде пластин, жестко связанных одним концом с основанием f2. Вследствие того, что магнитоанизотропные преобразователи по чувствительности превосходят проволочные тензорезисторы, то такие датчики ускорения обладают весьма высокими уровнями выходных сигналов. Однако из-за больших габаритов они имеют относительно невысокие собственные частоты и не могут быть размещены внутри тонкой полой державки аэродинамических весов для труб кратковременного действия, которые они также не удовлетворяют по быстродействию. Цель изобретения - увеличение быстродействия и чувствительности датчика при уменьшении его габаритов.
Указанная цель достигается тем, что в известном датчике ускорения, содержащем инерционную массу и дифференциальные магнитоанизотропные преобразователи с взаилюперекрещивающимися обмотками на общем магнитопроводе в виде пластин, жестко связанньох одним концом с основанием, пластины расположены под углом друг к другу и выполнены за одно целое с инерционной массой, при этом центр тяжести инерционной массы лежит на середине линии пересечения пластин, а обмотки выполнены общими для обоих магнитоанизотропных преобразователей При дискретном расположении обмоток на магнитопроводе провода одной из обмоток при переходе с одной пластины на другую проходят в одноименные отверстия, провода другой обмотки в диагонально расположенные отверсти При выполнении обмоток многосекционными и расположении их непрерывно по длине пластин магнитопровода провода одной из обмоток при переходе с одной пластины на другую проходят в одноименные отверстия, провода другой обмотки при числе преобразователей более двух на каждой пластине, начиная со второго преобразователя , проходят в диагонально расположенные отверстия соседних преобразователей. Угол между пластинами лежит в диапазоне 8-15° .
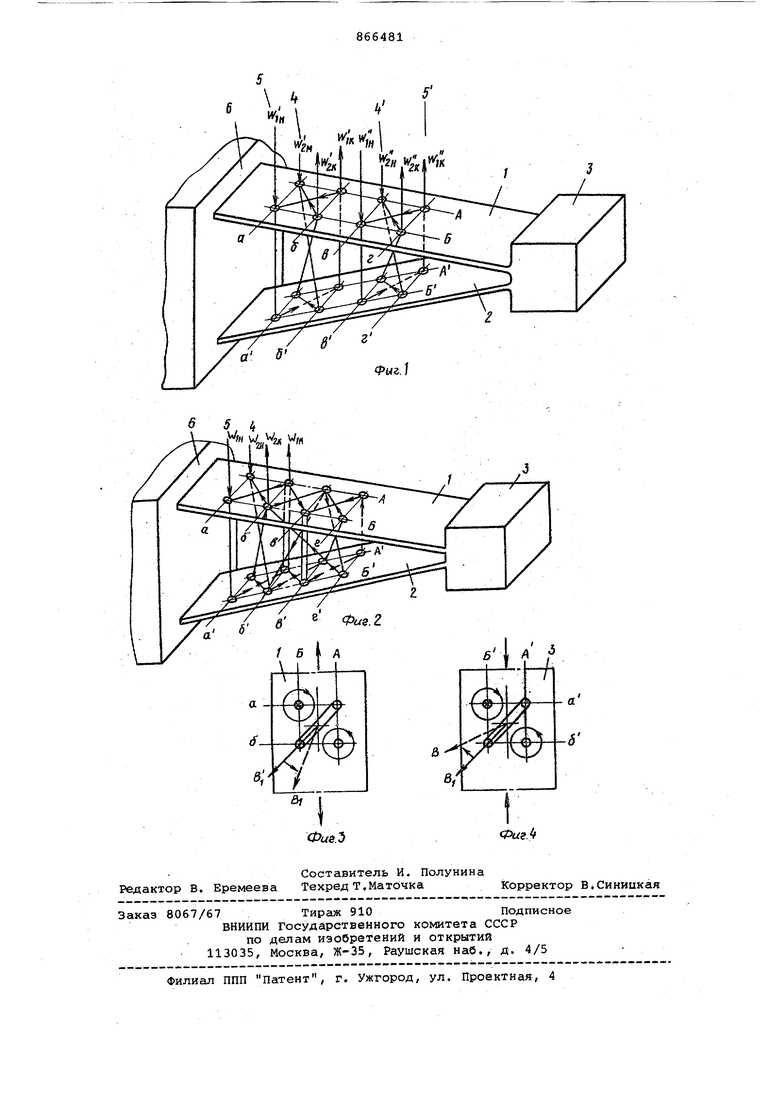
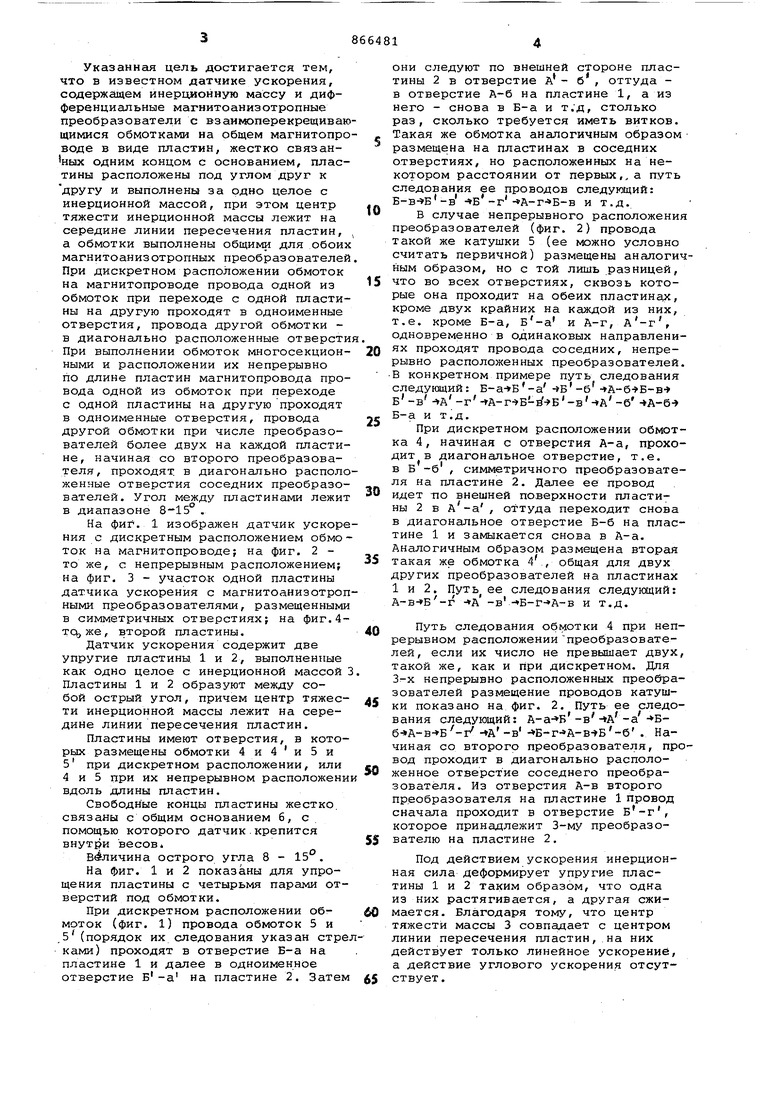
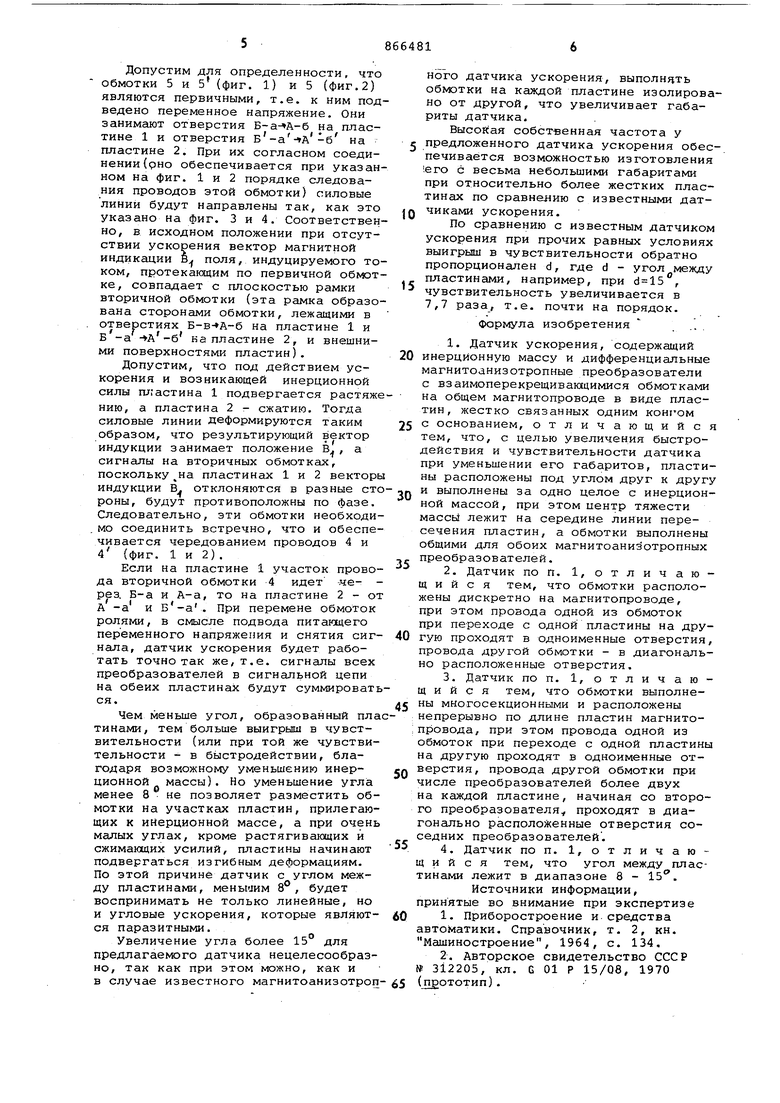
На фиг , 1 изображен датчик ускорения с дискретным расположением обмоток на магнитопроводе; на фиг. 2 то же, с непрерывным расположением; на фиг. 3 - участок одной пластины датчика ускорения с магнитоанизотропными преобразователями, размещенными в симметричных отверстиях; на фиг.4Tq, же, второй пластины.
Датчик ускорения содержит две упругие пластины 1 и 2, выполненные как одно целое с инерционной массой 3 Пластины 1 и 2 образуют между собой острый угол, причем центр тяжести инерционной массы лежит на середине линии пересечения пластин.
Пластины имеют отверстия, в которых размещены обмотки 4 и 4 и 5 и 5 при дискретном расположении, или 4 и 5 при их непрерывном расположени вдоль длины пластин.
Свободные концы пластины жестко, связаны с общим основанием 6, с помощью которого датчик крепится внутри весов.
Величина острого угла 8 - 15.
На фиг. 1 и 2 показаны для упрощения пластины с четырьмя парами отверстий под обмотки.
При дискретном расположении обмоток (фиг. 1) провода обмоток 5 и 5(порядок их следования указан стреками) проходят в отверстие Б-а на пластине 1 и далее в одноименное отверстие Б-а на пластине 2. Затем
они следуют по внешней стороне пластины 2 в отверстие А - б , оттуда в отверстие А-б на пластине 1, а из него - снова в Б-а и т.д, столько раз, сколько требуется иметь витков. Такая же обмотка аналогичным образом размещена на пластинах в соседних отверстиях, но расположенных на некотором расстоянии от первых,, а путь следования ее проводов следукяций: - Б -г-«А-г- Б-в и т.д.
В случае непрерывного расположения преобразователей (фиг. 2) провода такой же катушки 5 (ее можно условно считать первичной) размещены аналогичным образом, но с той лишь разницей, что во всех отверстиях, сквозь которые она проходит на обеих пластинах, кроме двух крайних на каждой из них, т.е. кроме Б-а, в-а и А-г, А-Г, одновременно в одинаковых направлениях проходят провода соседних, непрерывно расположенных преобразователей В конкретном примере путь следования следующий: Б-а- Б-а - Б-б Б-в - А-г- А-г Б-Е - Б-в- А-б +А-6- Б-а и т.д.
При дискретном расположении обмотка 4, начиная с отверстия А-а, проходит в диагональное отверстие, т.е. в Б -б , симметричного преобразователя на пластине 2. Далее ее провод идет -по внешней поверхности пластины 2 в А
оттуда переходит снова
в диагональное отверстие Б-б на пластине 1 и замыкается снова в А-а. Аналогичным образом размещена вторая такая же обмотка 4 , общая для двух других преобразователей на пластинах 1 и 2. следования следукадий: -в и т.д.
Путь следования обмотки 4 при непрерывном расположении преобразователей, если их число не превышает двух такой же, как и при дискретном. Для 3-х непрерывно расположенных преобразователей размещение проводов катушки показано на фиг. 2. Путь ее следования следующий: А-а- Б-в- А-а Бб- А-в- Б -г - Б-г- А-В Б-б . Начиная со второго преобразователя, провод проходит в диагонально расположенное отверстие соседнего преобразователя. Из отверстия А-в второго преобразователя на пластине 1 провод сначала проходит в отверстие Б-г, которое принадлежит 3-му преобразователю на пластине 2.
Под действием ускорения инерционная сила деформирует упругие пластины 1 и 2 таким образом, что одна из них растягивается, а другая сжимается. Благодаря тому, что центр тяжести массы 3 совпадает с центром линии пересечения пластин, на них действует только линейное ускорение, а действие углового ускорения отсутствует.
Допустим для определенности, что обмотки 5 и 5 (фиг. 1) и 5 (фиг.2) являются первичными, т.е. к ним подведено переменное напряжение. Они занимают отверстия на пластине 1 и отверстия Б-а- А-б на пластине 2. При их согласном соединении (рно обеспечивается при указанном на фиг. 1 и 2 порядке следования проводов этой обмотки) силовые линии будут направлены так, как это указано на фиг. 3 и 4. Соответственно, в исходном положении при отсутствии ускорения вектор магнитной индикации в поля, индуцируемого током, протекающим по первичной обмотке, совпадает с плоскостью рамки вторичной обмотки (эта рамка образована сторонами обмотки, лежащими в отверстиях на пластине 1 и Б -а - А-б ка пластине 2, и внешнии поверхностями пластин).
Допустим, что под действием ускорения и возникающей инерционной силы шгастина 1 подвергается растяжению, а пластина 2 - сжатию. Тогда силовые линии деформируются таким образом, что результирующий вектор индукции занимает положение В, а сигналы на вторичных обмотках, поскольку ,на пластинах 1 и 2 векторы индукции В. отклоняются в разные стороны, будут противоположны по фазе. Следовательно, эти обмотки необходиМО соединить встречно, что и обеспечивается чередованием проводов 4 и 4 (фиг. 1 и 2).
Если на пластине 1 участок провода вторичной обмотки 4 идет «е- рез, Б-а и А-а, то на пластине 2 - от А-а и в-а. При перемене обмоток ролями, в смысле подвода питающего переменного напряжения и снятия сигнала, датчик ускорения будет работать точно так же, т.е. сигналы всех преобразователей в сигнальной цепи на обеих пластинах будут суммироваться.
Чем меньше угол, образованный пласинами, тем больше выигрыш в чувстительности (или при той же чувствиельности - в быстродействии, благодаря возможному уменьшению инерионной массы). Но уменьшение угла енее В не позволяет разместить оботки на участках пластин, прилегаюих к инерционной массе, а при очень алых углах, кроме растягивающих и сжимающих усилий, пластины начинают подвергаться изгибным деформациям. По этой причине датчик с углом межу пластинами, меньшим В, будет воспринимать не только линейные, но и угловые ускорения, которые являются паразитными.
Увеличение угла более 15 для предлагаемого датчика нецелесообразно, так как при этом можно, как и в случае известного магнитоанизотропного датчика ускорения, выполнять обмотки на каждой пластине изолировано от другой, что увеличивает габариты датчика.
Высойая собственная частота у предложенного датчика ускорения обеспечивается возможностью изготовления 1его с весьма небольшими габаритами при относительно более жестких пластинах по сравнелию с известными датчиками ускорения.
0
По сравнению с известным датчиком ускорения при прочих равных условиях выигрыш в чувствительности обратно пропорционален d, где d - угол между пластинами, например, при ,
5 чувствительность увеличивается в 7,7 раза, т.е. почти на порядок.
Формула изобретения ...
1.Датчик ускорения, содержащий
0 инерционную массу и дифференциальные магнитоанизотропные преобразователи с взаимоперекрещивающимися обмотками на общем магнитопроводе в виде пластин, жестко связанных одним конгом
с основанием, отличающийся
5 тем, что, с целью увеличения быстродействия и чувствительности датчика при уменьшении его габаритов, пластины расположены под углом друг к другу и выполнены за одно целое с инерцион0ной массой, при этом центр тяжести массы лежит на середине линии пересечения пластин, а обмотки выполнены общими для обоих магнитоанизотропных преобразователей.
5
2.Датчик по п. 1, отличающийся тем, что обмотки расположены дискретно на магнитопроводе, при этом провода одной из обмоток при переходе с одной пластины на дру0гую проходят в одноименные отверстия, провода другой обмотки - в диагонально расположенные отверстия.
3.Датчик по п. 1, отличающийся тем, что обмотки выполнены многосекционными и расположены
5 непрерывно по длине пластин магнитопровода, при этом провода одной из обмоток при переходе с одной пластины на другую проходят в одноименные отверстия, провода другой обмотки при
0 числе преобразователей более двух
на каждой пластине, начиная со второго преобразователя проходят в диагонально расположенные отверстия соседних преобразователей .
5
4.Датчик по п. 1, отличающий с я тем, что угол между пластинами лежит в диапазоне 8 - 15.
Источники информации, принятые во внимание при экспертизе
1.Приборостроение и средства
0 автоматики. Справочник, т. 2, кн. Машиностроение, 1964, с. 134.
2.Авторское свидетельство СССР № 312205, кл. G 01 Р 15/08, 1970 (щототип).
5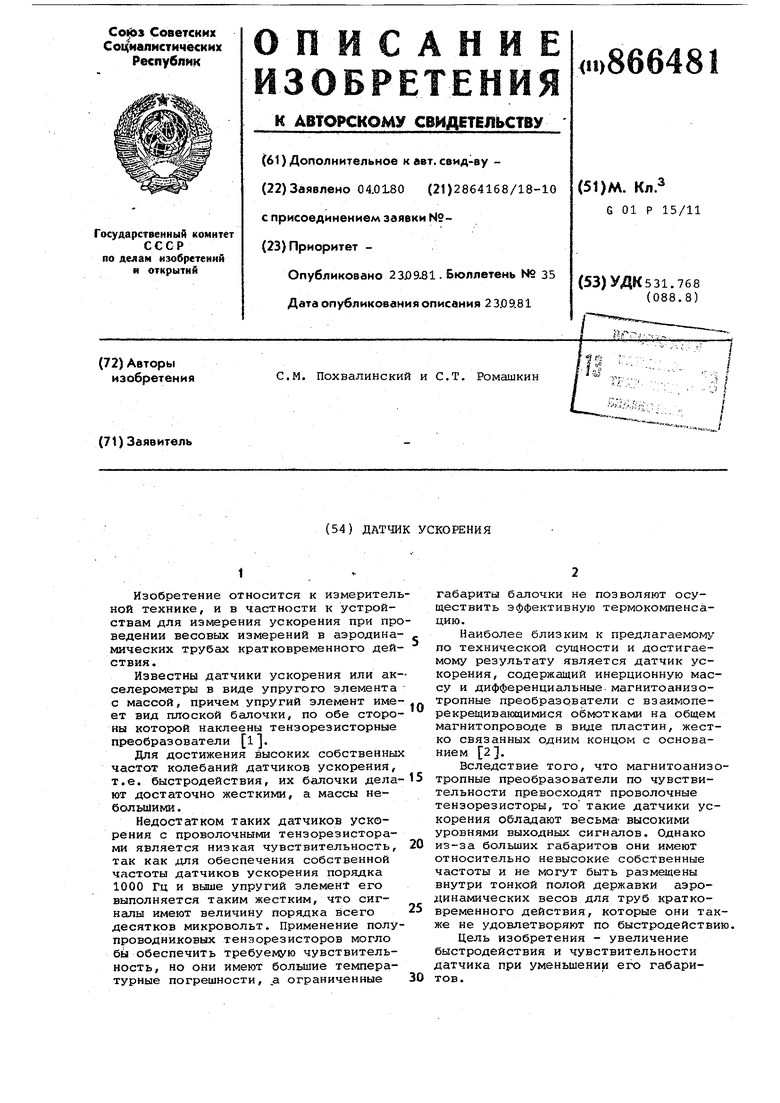
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоанизотропный преобразователь | 1982 |
|
SU1091034A1 |
| Магнитоупругий преобразователь ускорений | 1981 |
|
SU987532A1 |
| Датчик изменений линейных ускорений | 1990 |
|
SU1777091A1 |
| МАГНИТОУПРУГИЙ МАГНИТОИЗОТРОПНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2345336C1 |
| Преобразователь ускорений | 1981 |
|
SU1078337A1 |
| ДАТЧИК УСКОРЕНИЯ | 1971 |
|
SU312205A1 |
| Магнитоанизотропный датчик силы | 1973 |
|
SU491845A1 |
| Устройство для измерения угловых ускорений | 1961 |
|
SU150310A1 |
| Датчик угловых ускорений | 1991 |
|
SU1793384A1 |
| Способ компенсации начального напряженияМАгНиТОАНизОТРОпНыХ дАТчиКОВ иуСТРОйСТВО для ОСущЕСТВлЕНия СпОСОбА | 1978 |
|
SU800722A1 |