(5.4) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЬЕКТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное устройство для вибрационных испытаний конструкции | 1989 |
|
SU1682847A1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
| Устройство для подавления помех | 1978 |
|
SU809045A1 |
| Анализатор частотных характеристик | 1977 |
|
SU702352A1 |
| Адаптивный вычислитель частотных характеристик систем автоматического управления | 1980 |
|
SU1072004A1 |
| Анализатор частотных характеристик | 1979 |
|
SU800965A1 |
| Дифференциальная система идентификации | 1973 |
|
SU728113A1 |
| Устройство для определения коэффи-циЕНТОВ гАРМОНичЕСКОй лиНЕАРи-зАции | 1979 |
|
SU796791A1 |
| Устройство для определения амплитуднофазовых характеристик | 1977 |
|
SU664157A1 |
| Квазиуравновешенный мост для раздельного измерения одного из параметров нерезонансных трехэлементных двухполюсников | 1981 |
|
SU978054A1 |
1
Изобретение относится к технической кибернетике и может быть npHheeHeно в автоматизированных системах обработки результатов эксперимента для идентификации параметров динамических объектов.
Известны устройства для определения параметров объектов, содержсцдее генератор тестовых сигналов, суммирующие элементы, блоки сравнения Ш и Г2.
Недостатком этих устройств для определения параметров объектов является их низкая помехоустойчивость и точность.
Нгшболсэ близким по технической сущности к предлагаемому является устройство, содержащее усилители с подстраиваемыми коэффициентами по Числу определяемых параметров,подключенные своими параметрическими входами к выходу блока настройки параметров, а выходами - ко входам суммирующего блока,выход которого подключён ко входу первого блока сравнения,который своим выходом подключен ко входу блока настройки параметров ПЗ.
Недостатком известного устройства является.наличие дифференциальных устройств, что приводит к снижению
точности получаемых оценок параметров объекта при измерении выходных сигналов объекта с помехами, а .также к снижению помехозащищенности устройства.
Цель изобретения,- повышение точности оценок определяе шк параметров объекта и повышение помехозащищенности работы устройства.
10
Поставленная цель достигается тем, что в устройство введены генератор синусоидальных- и генератор косинусоидёшьных колебаний переменной частоты, синхронизатор, два коммутатора,
15 блоки умножения, интеграторы, множительно-интегрируккций блок, вход и выходы объекта соединены со входами усилителей с подстраиваемыми коэффициентами через последовательно соеди20ненные .блоки умножения и интеграторы, вход синхронизатора подключен ко входу объектна, а выход подключен ij: генеpaToipaM Синусоидальных и косйнусоидальных колебаний, причем входы генераторов подключены ко вхо25дам блоков умножения, входы первого коммутатора соединены ««входами интеграторов, а его вькод подключен ко входу второго блока сравнения,входы второго коммутатора подключены к
ыходам объекта, а его выход подклюен через соответствующий блок умноения и последовательно соединенные ножительно-интегрирующий блок К9 ходу второго блока сравнения, выход оторого подключен ко входу первого блока сравнения.
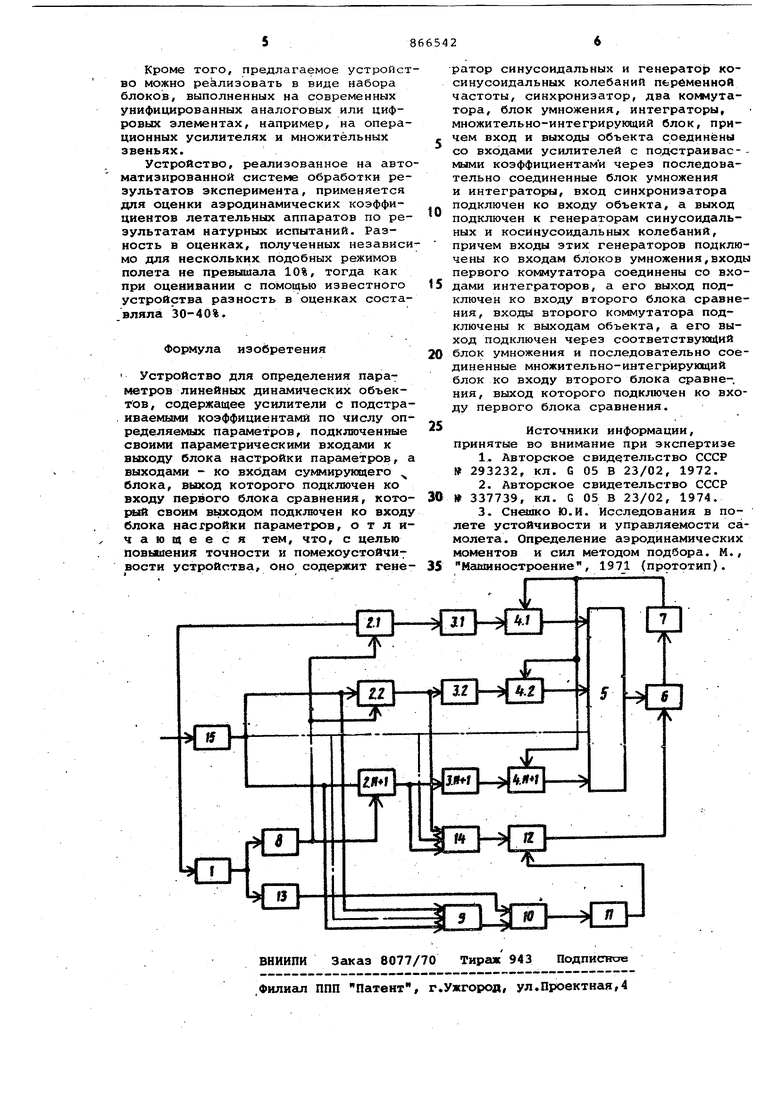
На чертеже представлена блок-схема предлагаемого устройства.
Устройство содержит синхронизатор 1, блоки умножения 2.1-2, N+1, интеграторы 3., N+1, усилители с подстрг1иваемыми коэффициентами 4.1-4. N+1,суммирующий блок 5, первый блок 6 сравнения, блок 7 настройки параметров , генератор 8 синусоидальных колебаний, первый коммутатор 9, блок 10 уменьшения, множительно-интегрирующий блок 11, второй блок 12 сравнения, генератор 13 косинусоидальных колебаний, второй коммутатор 14 и объект 15.
Устройство работает следующим образом.
Синхронизатор 1 осуществляет запуск генераторов синхронно с подачей на вход объекта тестового сигнала, в блоке 2.1 умножения происходит умножение входного сигнала на сигнал с выхода генератора 8 синусоидальных колебаний. Полученный сигнал интегрируется интегратором 3.1 в пределах от О до ССгде t - момент окончания переходных процессов) и поступает на вход усилителя 4.1. Аналогично через другие каналы проходят сигналы с выходов объекта. Сигналы с выходов усилителей 4.1-4. N+1 суммируются в суммирующем устройстве 5 и поступают на вход первого блока б сравнения.Сиг нал с одного из выходов объекта через первый коммутатор 9 ноступает на вход блока 10 умножения, где умножается на сигнал с выхода генератора косинусоидальных колебаний. Полученный сигнал умножается на текущее значение частоты колебаний генераторов в множительно-интегрирующем блоке 11 и во втором блоке 12 сравнения вычитается из сигнала с выхода блока умножения. Причем второй коммутатор 14 подключает в момент времени Т , соответствующий моменту окончания переходных процессов в объекте, ко второму блоку 12 сравнения выход блока умножения,-который своим вход м через первый коммутатор 9 подключен к блоку 10 умножения.
Выходной сигнал схемы вычитания сравнивается в первом блок б сравнения с выходным сигналом суммирующего устройства 5, В первом блоке б сравнения формируется сигнал рассогласования поступающих на его входы сигналов, на основании которого в ; блоке настройки параметров вырабатываются сигналы настройки коэффициентов усиления усилителей 4.1-4.N+1.Изменяя частоту колебаний Генераторов в пределах той частоты полосы пропускания объекта, где спектр помехи не перекрывается спектрами полезных сигналов, устройство обеспечивает помехоустойчивую работу устройства. В отличие от известного предлагаемЬе устройство использует для настройки параметров преобразованные в частотную область входной и выходные сигналы. После окончания процесса настройки N+1 параметров первый коммутатор 9 подключает свой выход к другому выходу объекта и, соответственно, переключает свой выход второй коммутатор 14, и осуществляется процесс настройки очередных N+1 параметров и т.д. Таким образом, последовательно по N+1 определяются все Nx{N+l) параметров.
В качестве рассмотрим процесс определения параметров линейного объекта, описываемого системой, состоящей из двух линейных дифференциальных уравнений первого порядка
..
(1) a iiiVia u
и у« - выходные сигналы
где
v(t);
объекта, у f, X - входной сигнал
объекта, X f;i(t);
определяемые параметры.
Умножим одно из уравнений (1),например , первое на f ( sinuui, прсцантёгрируем почленно в пределах от 6 до If , где О - момент подачи входного тестового сигнала, t - Moмент окончания переходных процессов в движении объекта под действием
входног о сигнала и получим
Т 7
X,(r)sinu;t-UJi costytelt c b s-i iiu at -Г о о
a-J
+Д
(2) о 6
(Аналогичное выражение может быть получено для второго уравнения систе-мы (1). В общем виде формула, ислоль зуемая для определения параметров имеет вид
- Т Ы
.lt) Ь: c(coidi Ila/j V.e nuJiolt го. i
, bjWuJi6K, («)
где j 1-N,
N - число измеряемых выходов . объекта.
Изменяя U в уравнении (3) в пределах полосы пропускания объекта, где отношение помеха/полезный сигнсш нулю, получим помехозсицищенное устройство, применяя которое удается избежать дифференцирования в явном виде измеренных выходных сигналов объекта, что в свою очередь также повышает помехозащищенность устройства
