(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОЙ ВЯЗКОСТИ ЖИДКИХ И ГЕЛЕОБРАЗНЫХ ПРОДУКТОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования процесса отверждения веществ | 1980 |
|
SU898296A1 |
| Устройство для измерения реологических характеристик жидких сред | 1980 |
|
SU868475A1 |
| Устройство для определенияфизиКО-МЕХАНичЕСКиХ ХАРАКТЕРиСТиКМАТЕРиАлОВ | 1979 |
|
SU819626A1 |
| Горизонтальный крутильный маятник для определения вязкости | 1979 |
|
SU785691A1 |
| Крутильный маятник | 1982 |
|
SU1151861A1 |
| Вискозиметр | 1976 |
|
SU594438A1 |
| Способ измерения вязкости | 1991 |
|
SU1778628A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКИХ И СЫПУЧИХ МАТЕРИАЛОВ | 2008 |
|
RU2387955C1 |
| Способ определения качества ферромагнитных материалов | 1979 |
|
SU855568A1 |
| Устройство для определения физико-механических характеристик материалов | 1981 |
|
SU994964A2 |
1
Изобретение относится к технике определения физико-механических характеристик жидких и гелеобразных продуктов по измерению параметров свободных колебаний (логарифмического декремента, частоты) комбинированной колебательной системы и может быть применено в химической, нефтехимической, автомобильной, машиностроительной и др. отраслях промышленности для научных исследований, лабораторного экспресс-контроля и в качестве поверочного средства при выпуске промышленных вискозиметров.
Известно устройство для измерения вязкостных и упругих характеристик жидких сред, содержащее упругий элемент, инерционную деталь, чувствительный элемент в виде тонкой пластинки, электромеханический и возбуждающий преобразователи, блок обработки информации.
Определение динамической вязкости и динамического модуля сдвига осуществляется путем измерения логарифмического декремента и частоты колебательной системы, которая при помощи возбуждающего преобразователя выводится из состояния равновесия, а затем совершает свободные кол бания, преобразуеь1ые электромеханическим преобразователем в электрические, обрабатываемые блоком обработки информации 1.
Недостатком устройства является недостаточно высокая точность измерений, связанная с возникновением в среде различного типа волн помимо сдвиговых.
10
Известно также устройство, предназначенное для определения динамической вязкости и модуля сдвига в жидких средах по измерению логарифмического декремента и частоты колебательной системы, совершающей крутильные колебания. Устройство содержит упругий элемент, инерционную деталь, чувствительный элемент
20 в виде тела вращения (диска, цилиндра, шара, конуса и т.д.), возбуждающий и электромеханический преобразователи, блок обработки информацииС. Устройство работает аналогично описанному выше.
В случае реализации крутильных колебаний тел вращения в контролируемой среде возникают только сдвиговые.волны, поэтому погрешность,
30 обусловленная возникновением в среде
волн помимо сдвиговых, в данном устройстве отсутствует 3.
Недостатком указанного устройства является резкое увеличение погрешности в случае измерений в гелеобразных продуктах, что связано с большими временами восстановления (релаксации) таких сред после погружения в них любого тела вращения.
Наиболее близким по технической сущности к предлагаемому является устройство для определения вязкости и упругости жидких и гелеобразных продуктов по измерению параметров колебаний (логарифмического декремента, частоты) колебательной системы, совершающей свободные крутильные колебания.
Устройство содержит упругий элемент (торсион), инерционный диск, чувствительный элемент, включающий подвижный и неподвижный цилиндры, электромеханический и возбуждающий преобразователи и блок обработки информации . Контролируемая среда при помощи специального дозатора закачивается в зазор между коаксиально расположенными цилиндрами 4.
Недостатками известного устройства являются зависимость погрешност измерений :от точности дозирования, а также малая экспрессность измерений, связанная с применением специаль,ного дозирующего устройства, требующего промывки и перезарядки, и с необходимостью разборки, сборки и юстировки колебательной системы после каждого заполнения чувствительного элемента. Кроме того, частая сборка, разборка и юстировка колебательной системы увеличивают величир{у субъективной ошибки при измерениях.
Цель изобретения - повышение точности и экспрессности измерений.
Поставленная цель достигается тем, что в устройстве для определения динамической вязкости жидких и гелеобразных продуктов, содержащем колебательную систему, состоящую из соединенных друг с другом упругого элемента, инерционного диска и чувствительного элемента, включающего подвижную и неподвижную детали, подвижная деталь чувствительного элемента выполнена в виде двойного цилиндра, погружаемая часть которого выполнена полой и жестко соединенной с непогружаемой его частью полосками являющимися продолжением погружаемой части.
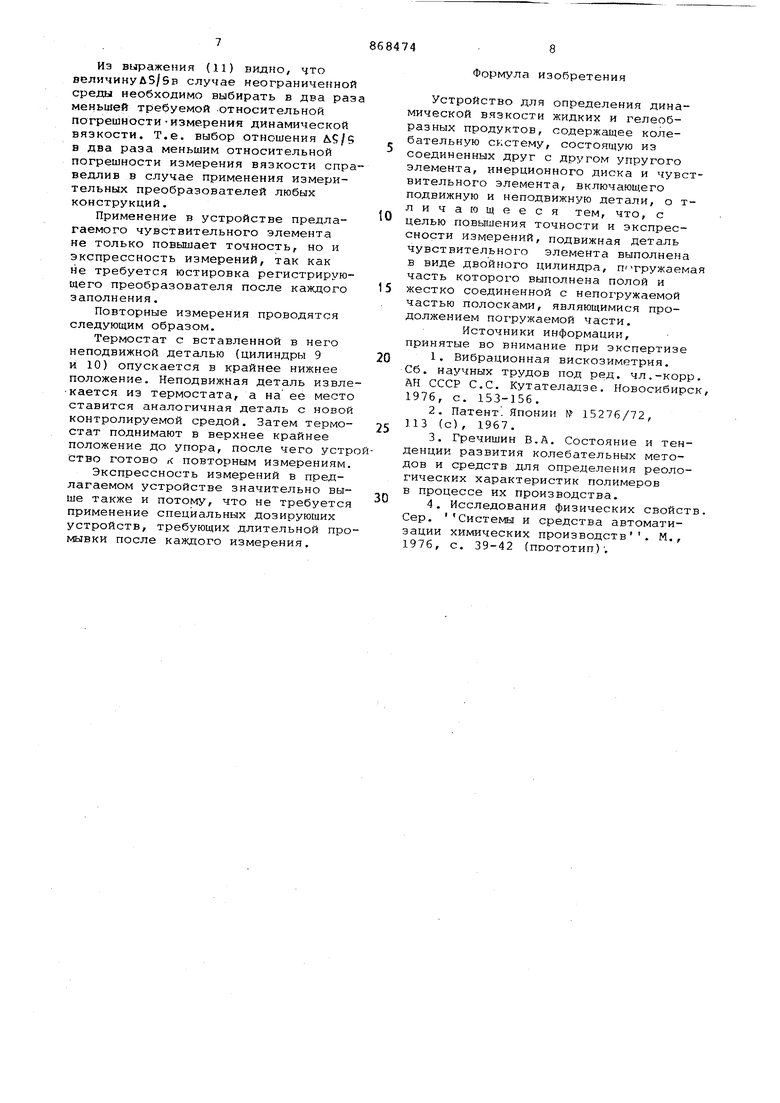
На фиг. 1 упрощенно изображена конструкция измерительного преобразователя устройства; на фиг. 2 схема чувствительного элемента.
Измерительный преобразователь соде1р5кит упрут ий элемент 1 в виде трубочного торсиона, верхним концом закрепленного в неподвижной опоре 2, а нижним - в подвижной опоре 3 инерционного диска 4. К нижней плоскост инерционного диска прикреплен стержень 5, ось которого находится на одной оси с упругим элементом 1. Чувствительный элемент преобразователя содержи л подвижную деталь в виде полого тонкостенного цилиндра б радиуса R.J, жестко соединенного с непогружаемой его частью 7 двумя полосками 8, являющимися продолжением тела полого цилиндра 6, и неподвижную деталь в виде полого тора образованного коаксиально расположенными цилиндрами 9 и 10 с внешним радиусом RY и внутренним R.-Измеряемая среда деформируется в зазора R2 - R и Rj - Н, т.е. между коаксиально расположенными цилиндрами 9 и 10. Стенка полого тора является верхней стенкой жидкостного термостата (не показан). Термостат перемещается в вертикальном направлении и фиксируется упором (не показан) , ЧТО позволяет глубину погружения цилиндра 6 выдерживать постоянной.
Внешний цилиндр 9 неподвижной детали снабжен фланцем 11, верхняя плоскость которого соответствует уровню заполняемой жидкости (высота h) .
Устройство работает следующим образом.
Неподвижная деталь, состоящая из цилиндров 9 и 10, опускается в кранее нижнее положение, после чего в полость между указанными цилиндрами помещается контролируемая среда с уровнем заполнения, несколько превышающим уровень, соответствующий верней плоскости фланца 11. Далее при помощи специального скребка, плоскость которого накладывают на кольцевую плоскость фланца 11, удаляют избыток среды, чтобы ее уровень совпадал с кольцевой плоскостью этого фланца. Подвижная деталь поднимается до фиксации упором. При этом полый цилиндр б полностью погружается в контролируемую среду, а полоски 8 погружаются на половину своей длины. После снятия, дополнительного крутящего момента, задаваемого на короткое время при помощи возбуждающего преобразователя (не показан), колебательная система упругий элемент 1 - инерционный диск 4 - полый цилиндр б совершает свободные колебания, которые при помощи электромеханического преобразователя (не показан) преобразуются в электрические колебания, параметры которых, (логарифмический декремент и частота) измеряются блоком обработки информации (не показан).
Ввиду того, что при каждом измерении строго постоянный уровень заполнения зазора между цилиндрами 9 и 10 выдержать трудно, общая боковая поверхность полосок 8 выбирается значительно меньшей, общей боко вой поверхности погружаемого цилин ра 6. Поэтому погрешность измерен т тем меньше, чем меньше отношение максимальной разности площади погр жения полосок к общей погружаемой площади при любых количествах погр жения. Величину указанного соотношения определяют следующим образом. Значение динамической вязкости для чувствительного элемента (фиг. определяется выражением J.2V.I 1 где A- логарифмический .декремент колебательной системы; I - момент инерции колебатель ной системы; Т|, - период колебаний колебател ной системы с измеряемой средой; b - форм-фактор. Логарифмируя (1), имеем en i--e,v 24tnx+e,n -tvibtvi.ci) Определяем относительную погрешность измерения динамической, вязкости:«..-IfMYI -/ /. Для определения (ц необходимо оценить каждое слагаемое правой час ти выражения (3). ВеличинадХ Хопределяется погреш.ностью измерения логарифмического декремента электронной схемой и мож быть учтена. Погрешность Л|/1 мала по величине и может быть устранена введением поправок. Максимальное значение погрешност измерения периода колебаний временными электронными измерителям временных интервалов составляет 0,03% и также может быть учтена. Для оценки величиныьЫЪ необходим определить выражение для форм-факто чувствительного элемента данного устройства. Как известно, при деформировании жидкой среды в узком зазоре между коаксиальными цилиндрами форм-фактор определяется выражением
WT
где Ь - длина цилиндров;
Rgj - радиус внутреннего цилиндра;
Rgц - радиус внешнего цилиндра. Так как в предлагаемом устройстве жидкость деформируется между двумя
-2ецЛ t2eMnivtn)V-2En1t-2eM6-tni,
.
Погрешности ,
дп
также
w могут Сыть учтены,
т.е. cf.., (,,) где ЛА/А- учтенная погрешность. цилиндрами радиусами R и R,, то форм-фактор определяется выражением - . R R- R, После преобразований имеем ( RV-HV Величина 4lLRj в выражении (6) определяет общую боковую поверхность погружаемого цилиндра 6 (при условии предельно тонкой стенки), т.е. S «. 4 . Примем ,r)--b, (1J Тогда АЬ-А5. J. 1 Продифференцировав выражение (7) и подставив туда величины радиусов цилиндров, учитывая допуски при их изготовлении, определяют Л.Ъ|Ъ. Эта величина составляет 0,05% и также может быть учтена. ПогрешностьЛ5/5не что иное, как отношение разности площади погружения полосок к общей погружаемой площади, если между цилиндрами залита измеряемая среда. Тогда относительная погрешность измерения вязкости определяется 1только изменением площади погружения цилиндра 6, зависящим от изменения уровня жидкости, т.е. rf,,-f,0) , где л А/А-учтенная погрешность. ,Из выражения (9) видно, что елательно выбирать настолько миниальным, насколько это позволяет ехническое выполнение подвижной етали, но во всех случаях выирают не более требуемой величины тносительной погрешности измерения инамической вязкости. В случае погружения цилиндра 6 в неорганичесую среду динамическая вязкость пределяется выражением A- KHo-V/ I / - U f , -ici.ea.2 Находим относительную погрешность змерения вязкости , логарифмируя ыражение (10): Из выражения (11) видно, го величинуд5/9в случае неограниченной среды необходимо выбирать в два раз меньшей требуемой относительной погрешности-измерения динамической вязкости. Т.е. выбор отношения в два раза меньшим относительной погрешности измерения вязкости спра ведлив в случае применения измерительных преобразователей любых конструкций. Применение в устройстве предлагаемого чувствительного элемента не только повышает точность, но и экспрессность измерений, так как не требуется юстировка регистрирующего преобразователя после каждого заполнения. Повторные измерения проводятся следующим образом. Термостат с вставленной в него неподвижной деталью (цилиндры 9 и 10) опускается в крайнее нижнее положение. Неподвижная деталь извле кается из термостата, а на ее мест ставится аналогичная деталь с новой контролируемой средой. Затем термостат поднимают в верхнее крайнее положение до упора, после чего устр ство готово к повторным измерениям Экспрессность измерений в предлагаемом устройстве значительно вы ше также и потому, что не требуетс применение специальных дозирующих устройств, требующих длительной пр мывки после каждого измерения. Формула изобретения Устройство для определения динамической вязкости жидких и гелеобразных продуктов, содержащее колебательную систему, состоящую из соединенных друг с другом упругого элемента, инерционного диска и чувствительного элемента, включающего подвижную и неподвижную детали, о тличающееся тем, что, с целью повышения точности и экспрессности измерений, подвижная деталь чувствительного элемента выполнена в виде двойного цилиндра, пгружаемая часть которого выполнена полой и жестко соединенной с непогружаемой частью полосками, являющимися продолжением погружаемой части. Источники информации, принятые во внимание при экспертизе 1.Вибрационная вискозиметрия. Сб. научных трудов под ред. чл.-корр. АН СССР С.С. Кутателадзе. Новосибирск, 1976, с. 153-156. 2.Патент. Японии № 15276/72, 113 (с), 1967. 3.Гречишин В.А. Состояние и тенденции развития колебательных методов и средств для определения реологических характеристик полимеров в процессе их производства. 4.Исследования физических свойств. Сер. Системы и средства автоматизации химических производств . М., 1976, с. 39-42 (ПРОТОТИП,);
в
w//.
