(54) УСТРОЙСТВО ДЛЯ ИНДУКЦИОННОГО КАРОТАЖА
1
Изобретение относится к промыслово-геофизической технике и может быть использовано-в устройствах, используемых для исследования электрических характеристик горных пород, пересеченных скважиной, а также для исследования разрезов нефтяных, газовых гидрогеологических и других скважин, бурящихся с целью разведки и добычи полезных ископаемых.
Известно устройство для индукционного каротажа скважин, содержащее зонд с генераторной и приемной катушкс1ми, генератор переменного тока, подключенный к генераторной катушке, измерительный преобразователь, подключенный к приемным катушкам, блок компенсации нулевого уровня сигнала зонда и регистратор .
В указанном устройстве повышение точности измерения достигается за счет компенсации нулевого уровня индукционного зонда. Однако компенсация нулевого уровня индуктивного зонда в широксм диапазоне температур не сохраняется, что ограничивает точность измерения в области высоких значений удельных сопротивлений и сужает динамический диапазон йзме.оения удельных сопротивлений пород. СКВАЖИН
Точность измерения ограничивается также неконтролируемым изменением параметров градуировочной характеристики измерительного канала под воздействием внешних факторов (например, температуры).
Наиболее близким к предлагаемому является устройство для индукционного каротажа скважин, содержаш е ин10дукционный зонд с генераторными и приемными катушками, генератор переменного тока, подключенный к генераторным катушкам, измерительный преобразователь , подключенный к измерительным катушкам, вычислительный блок, блок коммутации, блок введения эталонного сигнала с катушкой,расположен ной в зонде, подключенный к блоку коммутации. Блок введения эта20лонного сигнала выполнен в виде переключателя, изменяющего число витков в одной из измерительных катушек зонда, и переключателя, изменяющего фазу опорного напряжения фазового
25 селектора, входящего в сл-;тав измерительного npeo6pa30BaTejji, на 90 . Точность измерения повьаиашся за счет учета амплитудной и изовой нестабильности измерительно) канала
30 .путем проведения измерений, необходимых для определения поправочных коэффициентов и последующего введения их в результат измерений 2. Однако в данном устройстве не уменьшается погрешность, обусловленная нестабильностью активной компоненты нулевого уровня индукционного зонда, имеющей фазу полезного сигнала, но не связанной с проводимостью пород. Нестабильность активной компоненты нулевого уровня вызывается изменением, характеристик (в основном электропроводности) материалов катушек, экранов, проводов,металлических деталей под действием внешних факторов, главным образом температуры. Кроме того, контролируется только коэффициент передачи измерительного преобразователя, а дрейф 1;уля измерительного преобразователя не учитывается.
Цель изобретения - повышениеточности измерения.
Поставленная цель достигается .тем, что в устройство для индукционного каротажа, содержащее индукционный зонд с генераторными и приемными катушками, генератор переменного тока, подключенный к генераторным катушкам, измерительный преобразователь, подключенный к измерительным катушкам, вычислительный блок, блок коммутации, блок введения эталонного сигнала, подключенный к блоку коммутации, введены блок изменения нулевого уровня сигнала индукционного зонда и блок введения нуль-сигнала, причем входы блока изм,енения нулевого уровня Сигнала подключены к выходам блока коммутации, блок введения нуль-сигнала подключен параллельно входу измерительного преобразователя и соединен входом с выходом блока коммутации, вычислительный бло выполнен с двумя входами, первый из которых подключен к выходу измерителного преобразователя, а второй - к выходу блока коммутации.
Блок изменения нулевого уровня вполнен в виде разме14енных в индукционном зонде двух катушек, выводы которых замкнуты через управляемые ключи, управляющие входы которых являются входами блока изменения ну левого уровня.
Блок введения нуль-сигнала выполнен 5 виде управляемого ключа, включенного параллельно входу измерительного преобразователя, а управляющий вход ключа является входом блока введения нуль-сигнала.
Блок введенуя эталонного сигнала выполнен в виде катушки, размещенной на зонде, выводы которой замкну через последовательно включенные эталонный резистор и управляемый ключ, управляняций вход которого является входом блока введения эталонного сигнала.
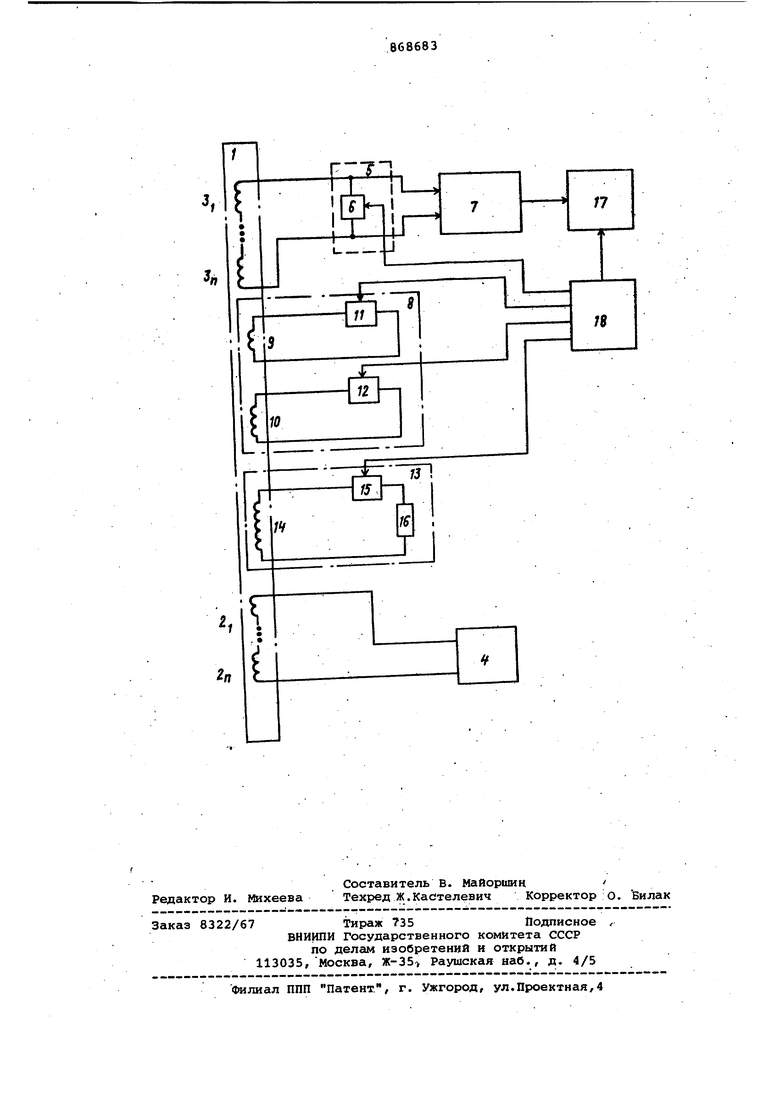
Кроме того, все проводящие детали зонда выполнены из одного материала., На чертеже приведена функциональная схема устройства.
Устройство включает индукционный зонд 1, содержащий генераторные катушки и измерительные катушки генератор 4 переменного тока, блок 5 введения нуль-сигнала,выполненный в виде управляемого ключа 6, измерительный преобразователь 7,блок 8 изменения нулевого уровня,состоя.щий из катушек 9 и 10 и управляемых ключей 11 и 12, блок 13 введения эталонного сигнала, состоящий из катушки 14, управляемого ключа 15 и эталонного резистора 16, вычислительный блок 17 и блок 18 коммутации. Генераторные катушки подключены к выходу генератора 4 переменного тока. Измерительные катушки соединены с управляемыми входами
ключа 6 блока 5 введения нуль-сигнала и со входом измерительного преобразователя 7. йлход измерительного преобразователя 7 соединен с первым входом вычислительного блока 17,
второй вход которого соединен с блоком 18 коммутации.
Концы каждой из катушек 9 и 10 соединены меящу собой чер соответствующие управляемые ключи 11 и 12, управляющие входы которых являются входами блока 8 изменения нулевого уровня и соединены с выходами блока 18 коммутации. Выводы катушки 14 блока 13 введения эталонного сигнала соединены между собой через управляемый ключ 15 и эталонный резистор 16. Управлякнций вход ключа 15 является входом блока введения эталон-. ного сигнала и соединен с выходом блока 18 коммутации.
Принцип рароты устройства заключается в том, что процесс измерения
разбивается во времени на цикла, в каждом из которых выполняется несколько тактов измерений, причем,время .цикла выбирается таким, чтобы величину измеряемой удельной электропроводности в течение времени цикла можно было считать постоянной с заданной степенью точнсюти. В первых двух тактах производится измерение исследуемой удельной электропроводности при двух значениях нулевого уровня индукционного зонда, а в двух последующих находится сумма исследуемой удельной электропроводности с эталонным сигналом, эквивалентным эталонной удельной электропроводности, и нуль-сигналом.
По показаниям, полученным в-каждом такте, рассчитывается значение измеряемой величины.
Пусть градуировочная характеристика измерительного канала линейна и ( имеет вид
Msa(, И) где N - показания на выходе измери тельного канала; а - коэффициент передачи измерительного канала; йу - значение измеряемой удельной электропроводности; Ь - нулевой уровень измеритель ного преобразователя; Л - нулевой уровень индукционного зонда. В первом такте измерения блок 18 коммутации открывает ключ 11 блока изменения нулевого уровня, а ключи 12 и 15 остаются закрытыми. При этом замкнутой накоротко оказываетс катушка 9 блока 8 изменения нулевог уровня. Такому состоянию на выходе измерительного кангша в непроводяще среде соответствует нулевой уровень Переменное напряжение, равное сумме измеряемого сигнала и нулевог уровня, подается на вход измеритель ного преобразователя 7, где формируется результат первого такта изме рения N sd6 -Hj+u i (1) Этот результат поступает в вычислительный блок 17 и фиксируется в его памяти. Во втором такте измерения блок 1 коммутации открывает ключ 12 блока 8 изменения Нулевого уровня, а ключи 6, 11 и 15 находятся в закрытом состоянии. При этом катушка 10 оказывается замкнутой накоротко. Такому состоянию на выходе измерительно го канала в непроводящей среде соот ветствует нулевой уровень Причем параметры катушки 9 и 10 -выбран так, что выполняется условие / W где Е и ЕО, значения активных компонент первого и второго нулевых уровней соответствен но; значения реактивных компонент первого и второго нулевых уров ней соответственно. Переменное напряжение, равное сум ме измеряемого сигнала и второго нулевого уровня, поступает на вход измерительного преобразователя 7, и в памяти вычислительного блока 17
фиксируется результат второго такта измерения.
N,,.& (Д) В третьем такте измерения блок 18коммутации открывает ключи 12 и 15, а ключи 6 и 11 остаются закрытыми.При этом катушка 14 згиль кается на эталонный резистор 16 и в измерительных катушках наводится сигнал, эквивгшентньШ эталонной удельной электропроводности бэт Переменное напряжение, равное сумме измеряемого и эталонного сигнёшов с вторым нулевым уровнем, поступает на вход измерительного преобразователя 7, и в вычислительном блоке 17 запоминается результат третьего такта измерения (,т)Ъ+л, (У) В четвертом такте измерения блок 18 коммутации открывает ключ 6 блока 5 введения нуль-сигнала, и вход измерительного преобразователя 7 Зс1мыкается накоротко. При этом на выходе измерительного канала получается ре-, |зультат, соответствующий нулевому значению сигнала на выходе. Результат четвертого такта измерения NA - Ь (6) запоминается вычислительным блоком 17. Таким образом, в результате че- . тырех тактов измерения в вычислительном блоке 17 имеются четыре результата, связанные с измеряемой вели- о чиной следупо м образом: М а6х-«- - Ан i М,ей,4Ьч/«. (Ц4б„)+Ъ4уу. . Эти выражения представляют собой систему четырех уравнений с четырьмя неизвестными 5х , а Ь, Д. Эта система решается в вычислительном блоке 17 относительно по алгоритму . M( / а 1 -иij- Полученное значение 0х с выхода ычислительного блока 17 поступает а выходной зажим. Как следует из выражения (8), реультат измерения удельной электророводности не зависит от нулевых ровней индукционного зонда и измеительного преобразователя, а также оэффициента передачи. Точность измеения определяется стабильностью талонной удельной электропроводности стабильности отношения
Стабильность эталонной электропроводности зависит от стабильности эталонного резистора 16 и может быть сделана достаточно высокой. Стабильность величины /а определяется стабильностью отношения геометрических размеров. Так как все детали индукционного .зонда расположены на едином стержне, имеющем по всей длине-одинаковый температурный коэффициент линейного расширения, то все геометрические размеры при нагревании зонда изменяются пропорционально, поэтому стабильность величины гораадо выше стабильности нулевых уровней д и л..
Предлагаемое устройство для индукционного каротажа скважин обеспечивает повышение точности измерения высоких значений удельных сопротивлений за счет снижения погрешностей, обусловленных нестабильностью нулевого уровня индукционного зонда и дрейфом нуля измерительного преобразователя ; получение при обработке результатов измерений непосредственно значения исследуемой удельной электропроводности. Вследствие того, что результат измерения не зависит.от коэффициента передачи и дрейфа нуля измерительного преобразователя, измерительные преобразователи могут быть выполнены по самым простым, а следовательно, надежным схемам.
Формула изобретения
Устройство для индукционного каротажа скважин, содержащее индукционный зонд с генераторными и приемными катушками, генератор переменного тока, подключенный к гене,раторным катушкам, измерительный преобразователь, подключенный к измерительным катушкам, вычислительный блок, блок коммутации, блок введения эталонного сигнала,подключенный к первому выходу блока коммутацйГй , отличающееся тем, чтоt с целью повышения точности измерения, в него введены блок изменения нулевого уровня сигнала индукционного зонда и блок введения нулье сигнала, причем входы блока изменения нулевого уровня сигнала подключены к второму и третьему выходам блока коммутации, блок введения нульсигнала подключен параллельно входу
измерительного, преобразователя и соединен входом с четвертым выходом блока коммутации, вычислительный блок выполнен с двумя входами, первый из которых подключен к выходу измерительного преобразователя, а вто-
5 рой - к пятому выходу блока коммутации .
2. Устройство по П.1, от л ичающ.ееся тем, что блок изменения нулевого уровня выполнен в
0 виде размещенных в индукционном зонде двух катушек, выводы которых замкнуты через управляоиые ключи, управляющие входы которых явл$аотся входами блока изменения нулевого уровня.
5 3. Устройство по пл. 1 и 2, о тли чающееся тем, что блок введения нуль-сигнала вьшолнен в виде управляемого ключа, управляющий вход которого является входом блока введения нуль-сигнала.
4. Устройство по пп, 1-3, отличающееся тем, что блок введения эталонного сигнала выполнен в виде к.тушкв, расположенной на зонде, выводы которой замкнуты через последовательно вклкучевные эталонный резистор и управляемый ключ, управляющий вход которого является входом блока введения эталонного сигнала. Источники информации,
0 принятые во внимание пря экспертизе
1.Авторское свидетельство СССР № 371546, КЛ. G 01 V 3/18, 1Э70.
2.Авторское свидетельство СССР № 284194, кл. G 01 V 3/18,. 1968 (прототип).
-HSVl
5I
n
18
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для каротажа скважин | 1980 |
|
SU934417A1 |
| Способ измерения при индукционном каротаже | 1979 |
|
SU911419A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ ЗОНДИРОВАНИЙ | 2009 |
|
RU2400780C1 |
| Устройство для каротажного электромагнитного зондирования | 1981 |
|
SU1004940A1 |
| Устройство для бокового индукционного зондирования | 1980 |
|
SU930193A1 |
| ПРИБОР ДЛЯ ИНДУКЦИОННОГО КАРОТАЖА СКВАЖИН | 1966 |
|
SU187170A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КАРОТАЖА СКВАЖИН | 1994 |
|
RU2063053C1 |
| Устройство для индукционного каротажа скважин | 1977 |
|
SU646297A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КАРОТАЖА СКВАЖИН | 2004 |
|
RU2292064C2 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНОГО ЭЛЕКТРОМАГНИТНОГО ЗОНДИРОВАНИЯ (ВАРИАНТЫ) | 2014 |
|
RU2570118C1 |
Ll
w
1
гп
Jj
I
