1
Изобретение относится к сельскому хозяйству, в частности к устройствам для стрижки овец.
Известно устройство для стрижки овец, включающее подвижные платформы с установленными на них держателями, на которых закреплены стригальные, машинки jjl .
Такое устройство сложно в эксплултации и не обеспечивает автоматиза,цию процесса стрижки овец.
Известно устройство для стрижки .овец, включающее подвижную платформу с установленным на ней держателем, 5 на котором закреплены стригальные машины, ножи которых связаны с механизмом привода 2 .
Это устройство не обеспечивает автоматизацию процесса стрижки овец. 20
Цель изобретения - автоматизация процесса стрижки овец.
Достигается это тем, что держатель выполнен в виде имеющей рычаги П-образной опоры,.поперечная часть кото- 25 рой установлена на шарнирах, а рычаги в свою очередь шарнирами связгиш со стригальными машинками и с поперечной частью П-образной опоры, при.чем каждый из упомянутых шарниров J30
выполнен в виде микродвигателя, электрически связанного, с программным узлом.
Программный узел содержитклапаны с соленоидами, блок пёмяти, опок управления и усиления, причем последний связан с блоком памяти и соленой- далуш клапанов.
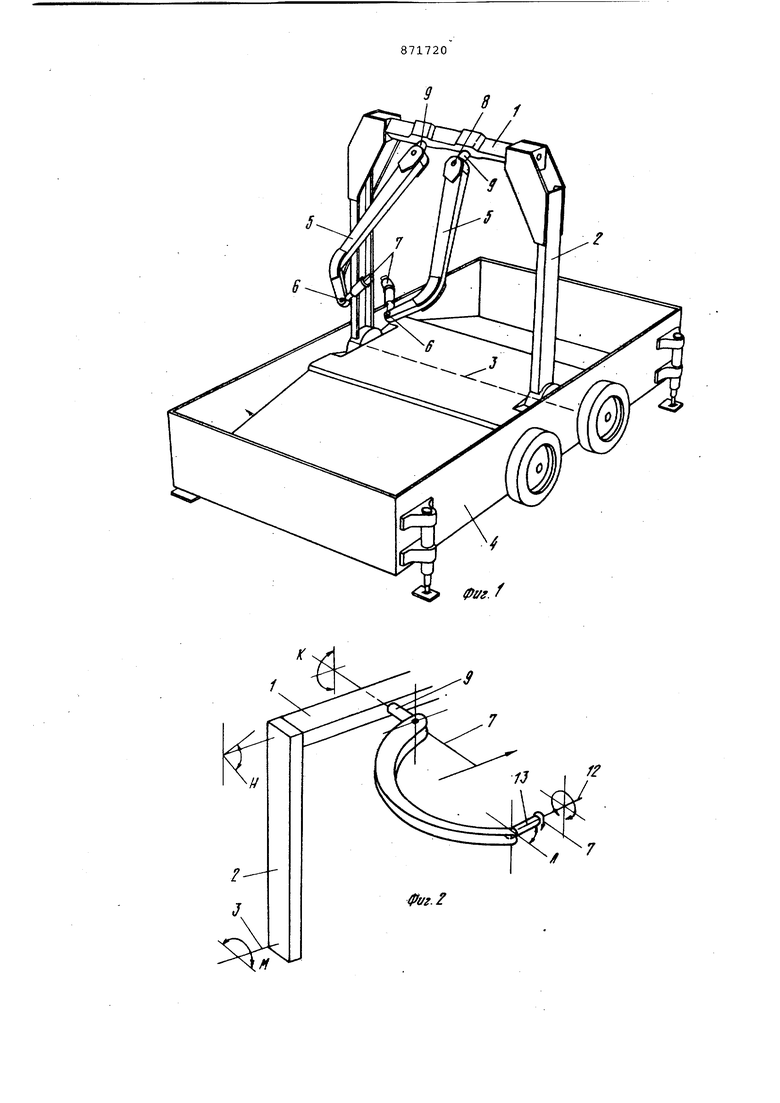
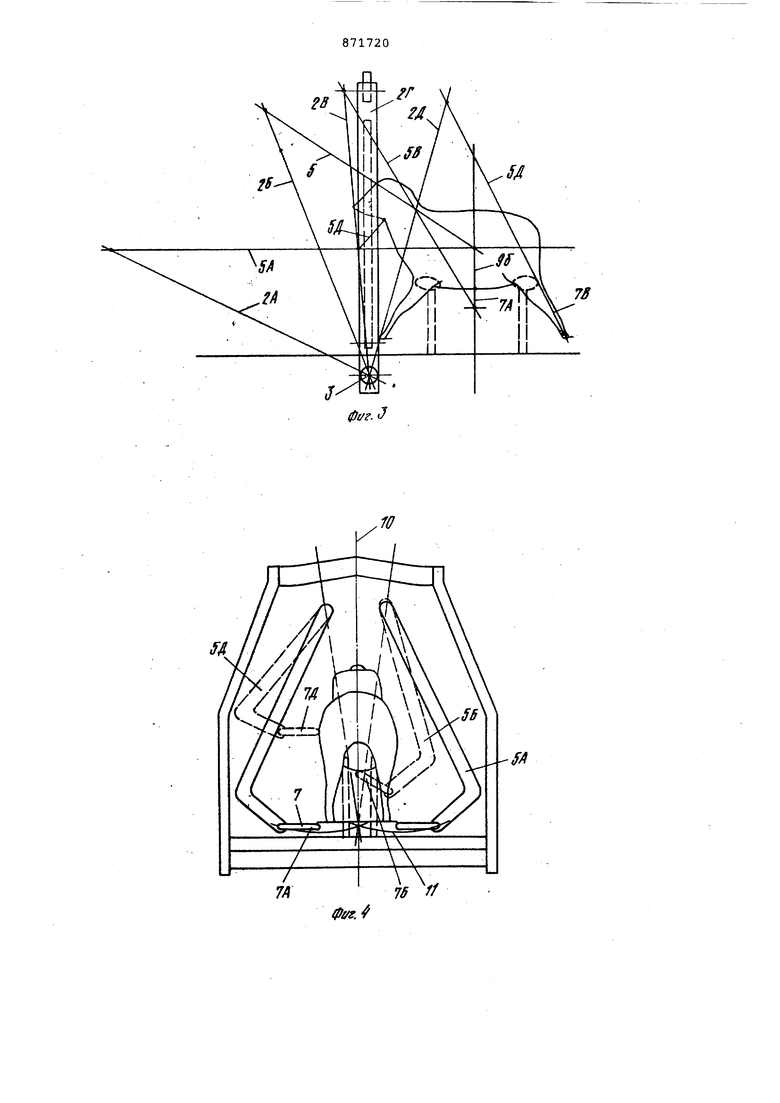
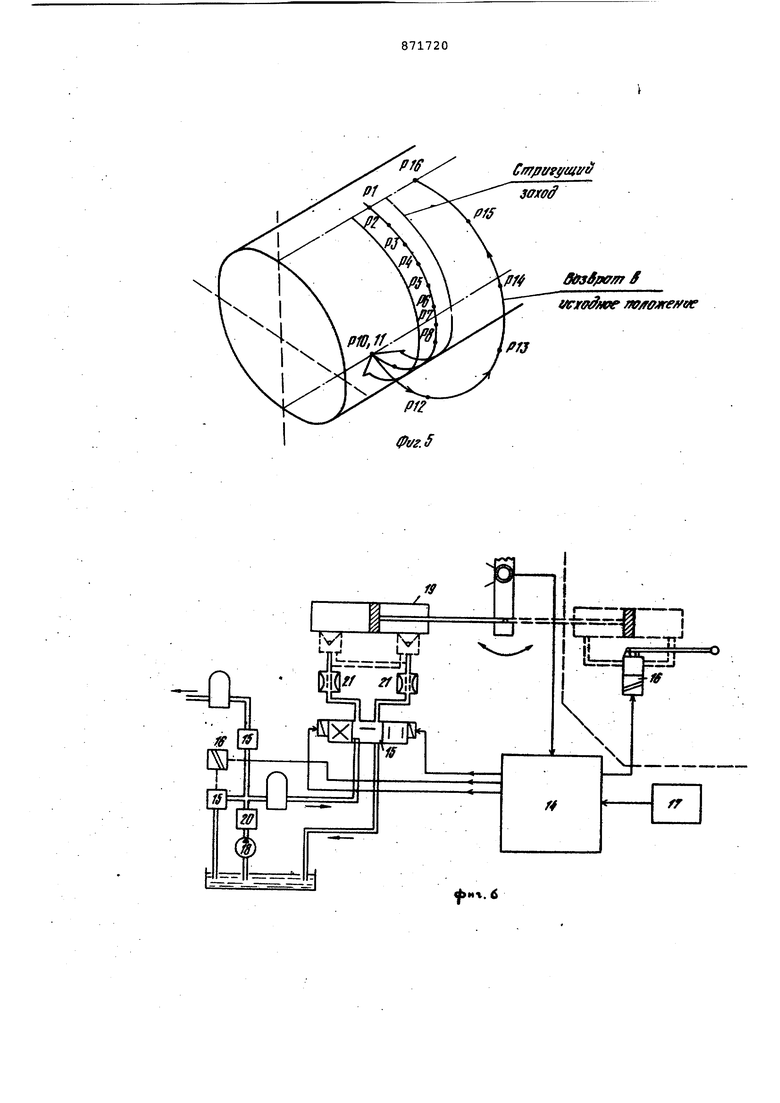
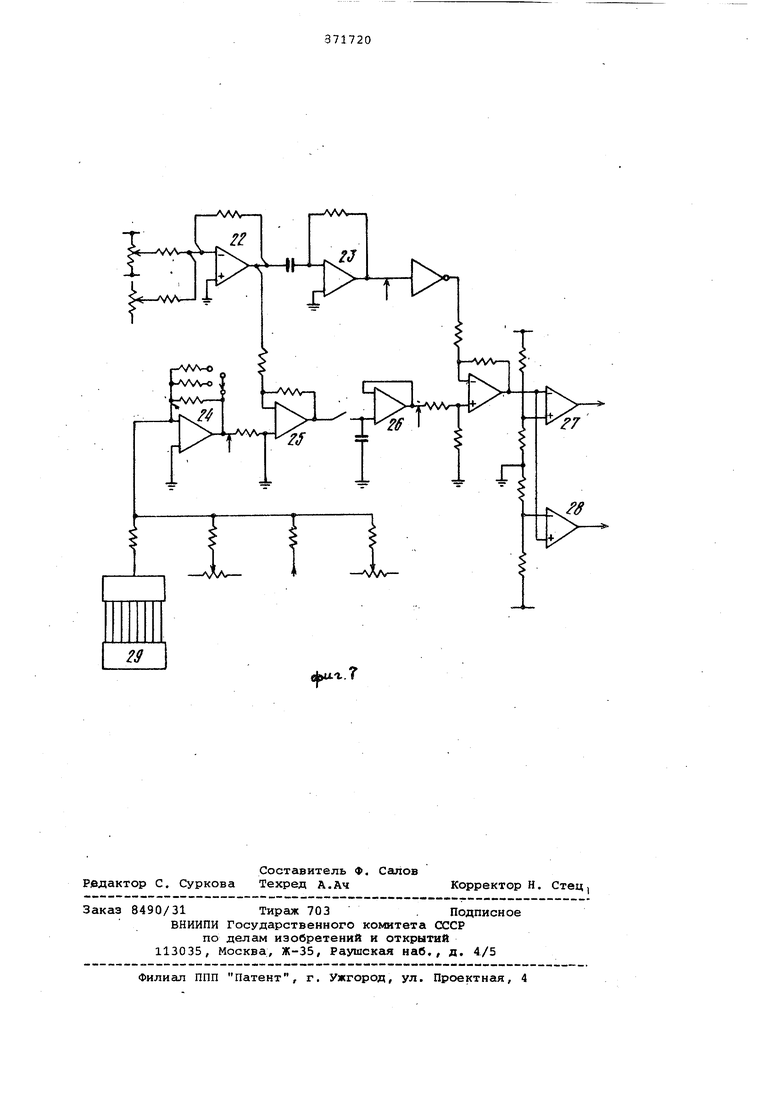
На фиг. 1 изображено устройство для стрижки овец, общий вид, на 1ФИ1. 2 - схема расположения осей устройства; на фиг. 3 - П-образная опора с рычагами во время стрижки овец, вид сбоку/ на фиг. 4 - то же, вид сзади, на фиг. 5 показана схема подготовительного и рабочего движений в процессе стрижки; на фиг. 6 - гидравлическая система управления устройства на фиг. 7 - электроннсш схема устройства.
Устройство для стрижки овец включает П-обраэную опору, состоящую из поперечной части 1, установленной на шарнирах стоек 2, которые шарнирно соединены с осью 3 подвижной платфорj«ii 4, рычагов 5, которые посредством шарниров б связаны со стригальными «ашинками 7 и с поперечной частью Й-образной опоры - при помощи шарниров 8 и 9, выполненных в виде налов, причем валы Сшарниры 9) расположены по отношению друг к другу под углом так, что их продолженньде оси пе ресекаются в той точке, гДе ось 10 симметрии этих валов пересекает окружность 11, прочерчиваемую концами рычагов 5. Шарниры устройства позвол ют располагать стригальные мгияинки 7 в любом требуемом положении относите но овцы. Все шарниры устройства выполнены в виде микродвигателей, причем стри-гальные машинки 7 могут перемещаться относительно оси 10 симметрии и поворачиваться вокруг своей продольной оси 12 f выполненно.й в виде кронштейна 13. Стригальные машинки 7 посредством шарниров б, 8, 9 и поперечной части 1 связаны с блоком 14 управления и усиления nporpaf.-iMHoro узла, содержащего клапаны 15 с соленоидами 16, носитель 17 программы, насос 18, при вод 19, фильтр 20 и гаситель 21. Блок 14 управления и усиления содержит усилители 22-26, элементы 27 и 28 сравнения, причем блок 14 управ ления и усиления связан с блоком 29 памяти. В процессе работы устройства стой ки 2 могут занимать различное положение, например в вертикальном положении - 2А-2Д, а рычаги 5 - в положе ниях 5А-5Д, стригальные же машинки 7 - Б положениях 7А-7Д. Любая точка на теле зафиксированной остригаемой овцы характеризуется углами М,Н,К,Л, Угол поворота кронштейна 13 вокруг своей продольной оси 12 характеризуе направление движения стригальной машинки 7, угол поворота рычага 5 на шарнире 8 определяет перемещение его относительно оси 10 симметрии. Углы каждой оси или координаты хранятся в блоке 29 памяти и определяют некоторое число точек на поверхности тел овцы в такой последовательности, при которой в процессе считывания их с памяти описывается последовательност стригущих и подготовительных движений. С каждым рабочим органом (стригальными машинками 7) связан управляющий им чувствительный датчик, обе печивающий перемещение его по телу овцы. Дпя перемещения стригальной машинки 7 от одной точки Р1 к другой Р2 каждая из осей (шарнир) должна двигаться с определенной скоростью, прод|ррциональной углу поворота этой С5СИ, чтобы обеспечить посредством со вокупности их движения перемещение стригальной машинки 7 к точке Р2. В данном устройстве для стрижки овец дан аналоговый способ управления скоростями каждой из осей между последовательными точками на поверх ности овцы. Поскольку все оси управ яются одинаковым образом-, описывается управление одной из них. Во время стрижки сигнал с выхода преобразователя углового смещения поступает на усилитель 22, дающий напряжение, пропорциональное истинному положению осиS Поскольку время между двумя последовательными положениями фиксировано равняется 0,2 с, скорость которой олжна достичь ось между точкой Р1, определяемой как истинное положение Ьс-и при помощи преобразователя углового смещения, и точкой Р2, положение которой определяется из блока 29 памяти, пропорциональна разности между истинным положением точки Р1 и требуемым положением точки Р2. Причем Р1 (истинное, положение оси может и не совпадать с Р1, определяемым блоком памяти, Дпя определения требуемого положения оси, хранящегося в блоке 29 памяти, 8-битовое слово преобразуется в электрическое напряжение и i подается на вход усилителя 24. Выходы усилителя 22 ( истинное положение) и усилителя 24 (требуемое положение) подаются на входы дифференциального усилителя 25. Координаты (требуемого положения 7 считываются из блока 29 память -:;х::ые 0,2 с. Когда требуемое положение считывается из памяти, выходное напряжение усилителя 25 пропорционально скорости, которую должна иметь ось, чтобы достичь этой точки через 0,2 с. В момент времени Т1 ось в точке Р1, или ее угловое смещения, Р1. В этот же момент Т1 считывается из блока 29 памяти точки Р2. В это время выход усилителя 22 пропорционален углу Р1 (истинное положение), выход усилителя 24 пропорционален углу Р2 (требуемое положени-е), а выход усилителя 25 Р2-Р1 пропорционален скорости, которую должна развивать ось, чтобыпопасть Р2 в момент Т2. Сразу же, как только из блока 29 памяти считано требуемое положение, выходное напряжение усилителя 25 фиксируется на этом уровне. Это напряжение /требуемая скорость/ служит входом для дифференциального усилителя 25. Выход усилителя 22 дифференцируется усилителем 23 так, что определяется истинная скорость, которая также служит входом для усилителя 26 , выходное напряжение которого положительно,- если истинная скорость меньше требуемой, и отрицательно в противном случае. Если эти скорости совпадают, выходное напряжение усилителя 26равно нулю. Выход усилителя 26 служит входом двух элементов 27 и 28 сравнения, устроенных так, что если истинная скорость меньше требуемой (выход усилителя 26 положителен), то элемент 27сравнения посылает ускоряющий сигнал. Если справедливо обратное Свыход усилителя 26 отрицателен), то эл мент 28 сравнения посьалает тормозящий сигнал. Если истинное и требуем значения скорости совпадают, то оба блока сравнения отключаются и ось в щается свободно. Входные нули блоко сравнения несколько сдвинуты относи тельно нулевого напряжения ( ±1 бкт) что обеспечивает метровый диапазон, предотвращающий колебания в системе Для остановки оси в конце стрижки последним двум точкам захода при сваиваются одинаковые координаты, так что скорость падает до нуля. Если требуется остановить маши ну во время выполнения программы, последний набор координат можно непрерывно повторять, сведя таким образом скорость всех осей к нулю. Вариации боковых размеров у овец могут быть автоматически скомпенсированы при помощи сервоконтроля рыча гов 5 и датчиков стриг альных машинок 7. Для учета вариаций продольных раз меров необходимо вводить масштабные коэффициенты для, по крайней мере, двух элементов - оси 3 и оси попереч ной части 1. Эти коэффициенты можно ввести в цепь обратной связи в у,силитель 24 для изменения усиления, чт приводит к изменению диапазона требу NBJX угловых положений. По входам установка нуля производится регулировка центрального п ложения, относительно которого произ водится поворот осей. Иногда необходим переход от обрат ной связи по скорости к обратной свя зи по положению, если ось находится под ручным управлением. Это выполняется путем подачи выхода усилителя 25 непосредственно на элементы 27 и 28 сравнения и отсоединения выхода усилителя 26. Элементы 27 и 28 сравнения после этого сравнивают требуемое и истинное положение и реагируют соответственно. Устройство действует по принципу Хранения памяти профиля в блоке 29 памяти. Нужное направление стригальной машинки 7 устанавливается при помощи комбинированного движения осей (фиг. 2). В устройстве запрограммировано дв жение оси 3, поперечной части 1, шар ниров 6, 8, 9 и кронштейнов 13. Отводящее {туда и обратно) движение .стригальных машинок 7 и рычаг 5 управляются датчиками действующей на них силы, чувствительныкм к небольшим изменениям контура овцы, изменениям ее профиля по ширине, сопротивлению резанию. При небольших изменениях контура овцы и при сопротивлении резанию отводящий механизм стригальной машинки обеспечивает моментальную реакцию для следования за контуром или быстрого отвода стригальной машинки, чтобы предотвратить травмирование животного или поломку стригальной машинки. В случае изменения профиля овцы по ширине рычаг 5 передвигается с мень.шей скоростью в соответствии с шириной профиля овцы. Профиль овцы с точки зрения программы рассматривается как совокупность координат на простой сетке. Эти -координаты или точки хранятся в памяти программы, откуда считываются последовательно по времени для всех осей сразу, и определяют последовательность стригущих и подготовительных движений. Стрижка производится в 48 заходов, каждый из которых представлен 16-ю точками, каждая иэ которых соответствует 8-ми битовому слову в блоке 29 памяти программы. К кгокдому управляемому элементу устройства - оси 3, поперечной части 1, шарнирам 6, 8, 9 и кронштейну 13 - присоединен преобразователь (потенциометр), указывающий положение этого элемента или скорость его перемещения в любой момент времени. Эта информация сравнивается с хранящейся в памяти, чтобы получить пропорциональный ошибке сигнал, поступающий на управляющий элемент в приводной системе, соответствующей оси элемента в форму положительного или отрицательного импульса, с частотой, необходимой для достижения нужной величины скорости этого элемента. Когда различные управляемые элементы приближаются к концу захода, информация, поступающая на каждый управляющий элемент, приводит к снижению скорости, достигающей нуля в конце захода, перед тем как обеспечить максимальные скорости и ускорения для возвращения стригальной машинки в исходное положение для следующего захода. Для учета различий в размерах овец информация из памяти тюсле цифроаналового преобразования масштабируется для некоторых из осей, в соответствии с размерами обстригаемойовцы. Приводная система устройства гидравлическая, за исключением электрического привода стригальной машинки, В гидравлической системе упрашления (фиг. 6) управляющим элементом служит трехсекционный быстродействующий соленоидный гидравлический клапан 15, на который подаются импульсы с блока 14 управления и усиления, вызывающие возбуждение клапана и обесечивающие передачу давления в нужном., направлении при помощи соответствующего привода. В нейтргшьном положении входные отверстия клапана закрыты, но выходные от крыты, допуская свободный переток, ;позволяяприводу свободно передвигаться вместе с осью. Для обеспечения стабильности работы каждрго из управляемых элементов (оси 3, поп речной ч-асти 1, шарниров б, 8, 9 и кронштейнов 13) требуется демпфирова ние, частично получаемое за счет использования последовательно установленных между приводом и клапаном гасителей 21 . Между насосом 18 и управляемыми элементами (осями, шарнирами, кроншт нами), установлены аккумуляторы, обес печивающие давление и изоляцию между ними во время пульсации приводов. Один насос мощностью 2,2 кВт, работающий при 450 фунтах на квадратный дюйм (31,6 кгс/см Л обеспечивает всю гидравлическую систему. Для уменьшения нагрузки насоса между пиками при стрижке используется разгрузочный клапан. Ось 3 приводится в движение при помощи двух линейных приводов, для остальных управляемых элементов используются вращательные приводы, но можно применять и линейные . Можно использовать гидравлический насос как постоянного, так и переменного объема. Кроштейны 13, ус тановленные на концах рычагов 5, поддерживают электрические стригальные машинки 7, Имеются датчик давления, который в случае, когда сопротивление передвижению вперед превышает заданную величину, включает соленоидный клапан в кронштейне 13. Этот клапан, в свою очередь, включает линейный привод кронштейна, что приводит к быстрому отводу стригальной машинки от овцы и вызывает более медленный отвод рычага 5. в этом устройстве может быть использован датчик на основе воздушной струи, направляемой на кожу овцы через трубки, причем изь нение давления, вызываемое изменением расстояния от гребня стригальной машинки (ее ножей до кожи, используется для управления соленоидным клапаном и положением привода. Кроме того, могут быть использованы и другие датчики, например на основе измерения поля, возникающего в результате пропускания через кожу и тело овцы тока высокой частоты. Может быть использована настройка изолированной катушки, нарушающая ся , если катушка располагается вбли зи поверхности или объекта. Кроме того, для этого могут быть использова ны емкостные датчики, применяемые для точного управления рабочим орга - ном. Для основного управления используется вычислительная машина с введенными в нее угловыми координатами, определяющими избранные положения на поверхности тела овцы. Повороты и наклоны кронштейнов, располагающих стригальные машинки под нужным углом для стрижки, осуществляют при помощи вращательного привода и запрограммированных пововотов осей и шарниров. Предлагаемое устройство для стрижки овец требует только лишь установки в него овцы. Процесс стрижки овцы осуществляется без вмешательства в него человека, который проверяет только правильность установки овцы. Формула изобретения 1.Устройство для стрижки овец, включаюидае подвижную платформу с установленным на ней держателем,, на котором закреплены стригальные машинки ,, ножи которых связаны с механизмом привода, отличающееся тем, что, с целого автоматизации процесса стрижки овец,., держатель выполнен в виде имеющей рычаги П-образной опоры, поперечная часть которой установлена на шарнирах, а рычаги в свою очередь шарнирами связаны со стригальными машинками и с поперечной частью П-образной опоры, при- чем каждый из упомянутых, шарниров выполнен в виде микродвигателя, электрически связанного с программным узлом. 2.Устройство по п. 1, отличающееся тем, что программный узел содержит клапаны с соленоидами, блок памяти, блок управления и усиления, причем последний связан с блоком памяти и соленоидами клапанов. Приоритет по пунктам: 19.12.75- по п. i; 01.04.76- по п. 1. Источники информации, принятые во внимание при экспертизе 1.Патент Австралии № 212327, кл. 37.6, 1958. 2.Патент Австралии № 411485, кл. 37,6, 1965 (ПРОТОТИП).
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для стрижки овец | 1989 |
|
SU1752298A1 |
| УСТАНОВКА ДЛЯ СТРИЖКИ ОВЕЦ | 1991 |
|
RU2032329C1 |
| СПОСОБ СТРИЖКИ ОВЦЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2027356C1 |
| ТРЕНАЖЕР | 2008 |
|
RU2369911C1 |
| МОБИЛЬНЫЙ АГРЕГАТ ДЛЯ СТРИЖКИ ОВЕЦ | 2001 |
|
RU2195817C2 |
| УСТРОЙСТВО ДЛЯ СТРИЖКИ ЖИВОТНЫХ | 2007 |
|
RU2354538C2 |
| Машинка для стрижки овец | 1986 |
|
SU1320058A2 |
| Машинка для стрижки овец | 1982 |
|
SU1088929A1 |
| Машинка для стрижки овец | 1975 |
|
SU667115A3 |
| Устройство для стрижки овец | 1976 |
|
SU626737A1 |
$А
Cfffflt/fff ff
3ffX0ff
SflffffT «rwKSwr m /rffjfre/ifeH
«Ьиг. б
С
