(54) УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного измерения линейных перемещений | 1959 |
|
SU135788A1 |
| Устройство для дистанционного определения положения объекта | 1983 |
|
SU1211596A1 |
| Устройство для защитного отключения сети переменного тока при утечке тока на землю | 1989 |
|
SU1817179A1 |
| Регулятор напряжения с непрерывным регулированием | 1980 |
|
SU858204A1 |
| Указатель короткого замыкания | 1981 |
|
SU1054804A1 |
| Магнитомодуляционный линейный сельсин | 1975 |
|
SU598192A1 |
| Гибридный контактор переменного тока | 1981 |
|
SU1003169A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2000 |
|
RU2168842C1 |
| Указатель коротких замыканий | 1990 |
|
SU1780058A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ | 1968 |
|
SU213160A1 |
1
Изобретение относится к контрольно-измерительной технике и может быть использовано, в частности, для дистанционного нз.мерения линейных перемещений в установках, изолированных от внешней среды.
По основному авт. св. № 135788 известно устройство для дистанционного измерения линейных перемещений, содержащее трубу из немагнитного материала внутри которой установлен магнит, связываемый с контролируемым объектом в процессе измерения перемещений, снаружи трубы размещено несколько тороидальных сердечников, охватывающих трубу и несущих .на себе по две обмоткн. Тороидальные сердечники расположёны вдоль трубы на равных расстояниях один от другого. Пары обмоток, каждых двух тороидальных сердечников соединены в мостовые схемы, подключенные к однофазной сети питания переменного тока. Выходные диагонали мостовых схем подключены к сельсину-приемннку. При отсутствии постоянного подмагннчивающего поля магнита индуктивности всех плеч мосTOBbix схем одинаковы. При приближении к тороидальным сердечникам перемещающегося внутри трубы постоянного магннта -происходит разбаланс мостовых схем за счет нз2 .
менения индуктивных сопротивлений обмоток, включенных в них.
Параллельное соединение ряда мостовых схем при размещении тороидальных сердечников на равных расстояниях вдоль трубы позволяет получить многопериодные синусоидальные изменения выходных напряжений на всем контролируемом интервале перемещений. Наличие двух или трёх подобных групп тороидальных сердечников, соответственно смещенных одна относительно другой, дает двухфазную или трехфазную системы синусоидальных многопериодных
10 изменений напряжений, которьв подаются на сельсин-приемник, благодаря чему линейное перемещение постоянного магнита, связанного с контролируемым объектом, преобразуется в многооборотное вращение ро.- topa сельсина, выполняющего, по существу, функции точного указателя перемещеннй 1). Недостатком известногр устройства яв-. ляется возможность возникновения неопределенности в нзмереннях фактического положения контролируемого объекта при пропадании напряжения в сети питания, так
90 как устройство является многопериодным. В случае перемещения контролируемого объекта в обесточенном состоянии устройства.
после восстановления напряжения его пнтания становится неясным, в каком из пеpHOAOBf контролируемого интервала перемещений производится измерение перемешейий объекта.
Цель изобретения - повышение точности измерения линейных перемещений контролируемого объекта в случае пропадания напряжения в сети питания.
Поставленная цель достигается тем, что устройство для дистанцнонного измерения линейных перемещений снабжено вспомогательными последовательно соединенными обмотками, размещенными на (шп-1-1) тороидальных сердечниках, где m - число фаз на выходе устройства, п 0,1,2,3... - целые числа натурального ряда, герконами, размещенными в зоне действия этих обмоток на поверхности трубьь и последовательно соединенными аналоговым указателем перемещений, делителем напряжения и выпрямительным мостом, к входной диагонали которого подключены последовательно соединенные всмомогательные обмотки, одни контакты repkoHOB соединены между собой и подключеиы к одному из выводов цепи последовательно соединенных вспомогательных обмоток, а другие контакты герконов подключены через резисторы к точкам соединения вспомогательных обмоток дайной цепи. .
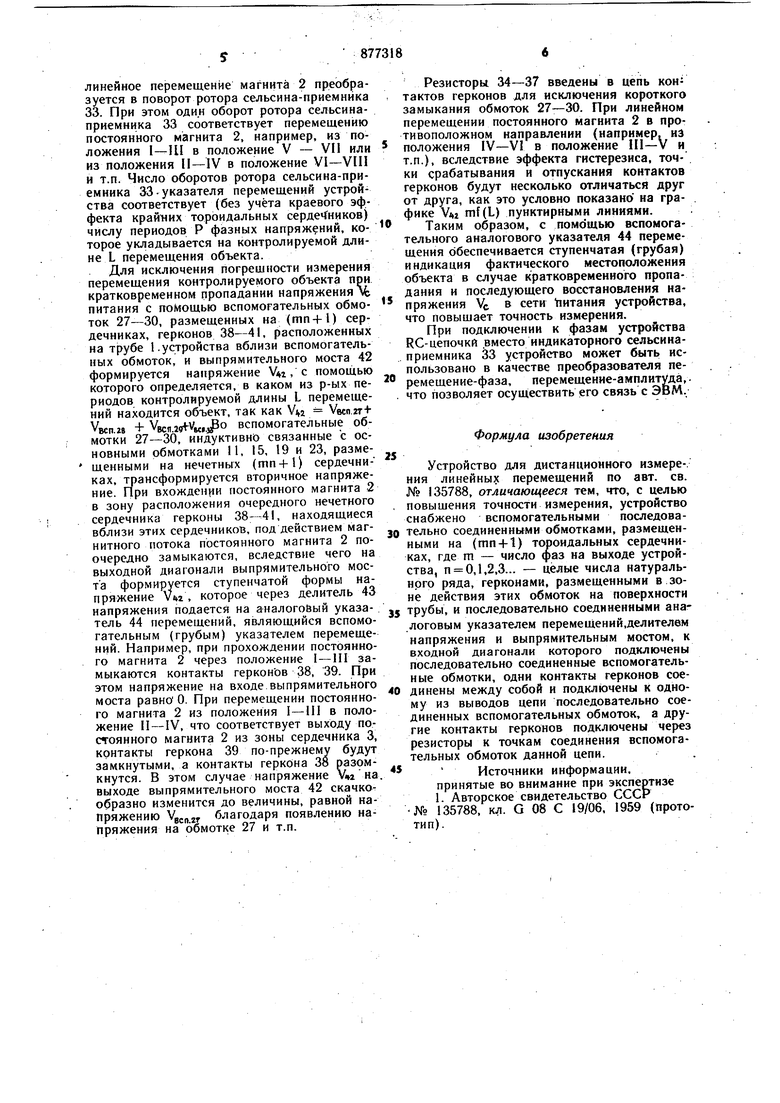
На фиг. I изображено предлагаемое устройство. Двухфазный вариант; на фиг. 2 - устройство, общий вид; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - зависимости фазных напряжений на основиом выходе устройства и на выходе выпрямительного моста .в функции перемещения постоянного магнита.
Устройство содержит трубу 1 из немагнитно стали, внутри которой находится постоянный магнит 2, жестко связываемый в процессе измерений с объектом, перемещение которого контролируется.
На трубе I на равныхрасстояниях один от другого расположено К тороидальных сердечников с двумя обмотками на каждом из них. Для измерения перемещения объекта на длине 1(без учета краевого эффекта) общее число К сердечннкоув должно быть равно К 2тр, где р - Целое число периодов фазных напряжений на основном выходе устройства, укладывающихся на длине L, а m - число фазных напряжений на оснрвHQM выходе устройства. На тороидальных сердечннках (К В), охватывающих трубу, размещено по две обмотки 11 -12, 13- 14 15-16, 17-18, 19-20, 21-22, 23-24 и 25-26. Кроме того, на нечетных тороидальных сердечниках 3, 5, 7 и 9 т.е. на сердечниках, где п - целые числа натурального ряда, размещены вспомогательные обмотки 27, 28, 29 и 30, соединенные между собой в последовательную цепь.
Обмотки II -12, 15-16 и т.д. Нечетных (тпЧ-1) тороидальных сердечников 3 и 5, 7 и 9) и соответствующие обмотки четных (mn-f2) сердечников (4 и 6, 8. и 10) соединены в мостовые схемы, запнтываемые от Vc переменного тока. Выходные диаго-нали мостовых схем, содержащих обмотки, размещенные на нечетных (тп+1) сердечниках, соединены параллельно и образуют первую фазу устройства. Выходные диагонали мостовых схем, содержащих обмотки, размещенные на четных (mn-f 2) сердечниках, также соединены параллельно и образуют вторую фазу устройства. В трехфазном варианте устройства первую фазу образуют обмотки, размещенные на шп + 1) сердечниках, вторую фазу - обмотки на (1лп-ь2) сердечниках, третью фазу - обмотки на (тп + 3) сердечниках. К фазам устройства подключены вторичные обмотки 31 и 32 сельсина-приемника 33, выполняющего функции основного (точного) указателя перемещений устройства.
Выводы каждой из вспомогательных обмоток 27-30 через резисторы 34-37 подключены к контактам герконов 38--4I, расположенных на трубе 1 в зонах (mn + 1) сердечников как при двухфазном, так и при трехфазном варианте выполнения ycтpoйctва. Для обеспечения нормального режима работы герконов они располагаются на трубе 1 вблизи вспомогательных обмоток 27-30 (mn-f I) сердечников. Плоскости контактов герконов должны быть расположены в плоскости, касательной к трубе.
Другие контакты герконов 38-41 соединены между собой и с выпрямительным мостом 42, к которому подключен также один из выводов вспомогательной обмотки 27. Выход выпрямительного моста 42 соединен с делителем 43 напряжения, к которому подключен вспомогательный аналоговый указатель 44 перемещений выполняющий функции грубого указателя. Обмотка 45 возбуждения сельсина-приемника 33 так же, как и основные обмотки сердечников, запитывается от сети УС, переменного тока.
Устройство работает следующим образом.
При отсутствии постоянного подмагни:чивающего поля магнита 2 индуктивные сопротивления обмоток 11 - 12, 13-14, 15-16, 17-18, 19-20, 21-22, 23-24, 25-26 в
1Глечах мостовых схем одинаковы. Перемещение внутри трубы I, а следовательно, и внутри восьми тороидальных сердечников 3-9 и 16 постоянного магнита 2 вызывает (за счет изменения индуктивных сопротивлений обмоток тороидальных сердечников)
разбалансирование мостовых схем и появление на их выходных диагоналях двухфазного , и Уфа или (трехфазного) выходного напряжения, которое в функции линейного перемещения на длине постоянного магнита 2 изменяется по амплитуде и фазе
по закону, близкому к синусоидальному. Вы.бором оптимальной длины постоянного магнита 2 достигаетсямаксимальное приближение к синусоидальному закону изменения фазных выходных напряжений в функции линейного перемещения магнита. Полученные с мостовых схем фазные выходные напряжения поступают на обмотки 31 и 32 синхронизации ротора сельсина-приемника 33, являющегося основным (точным) указателем перемещений, с помощью которого
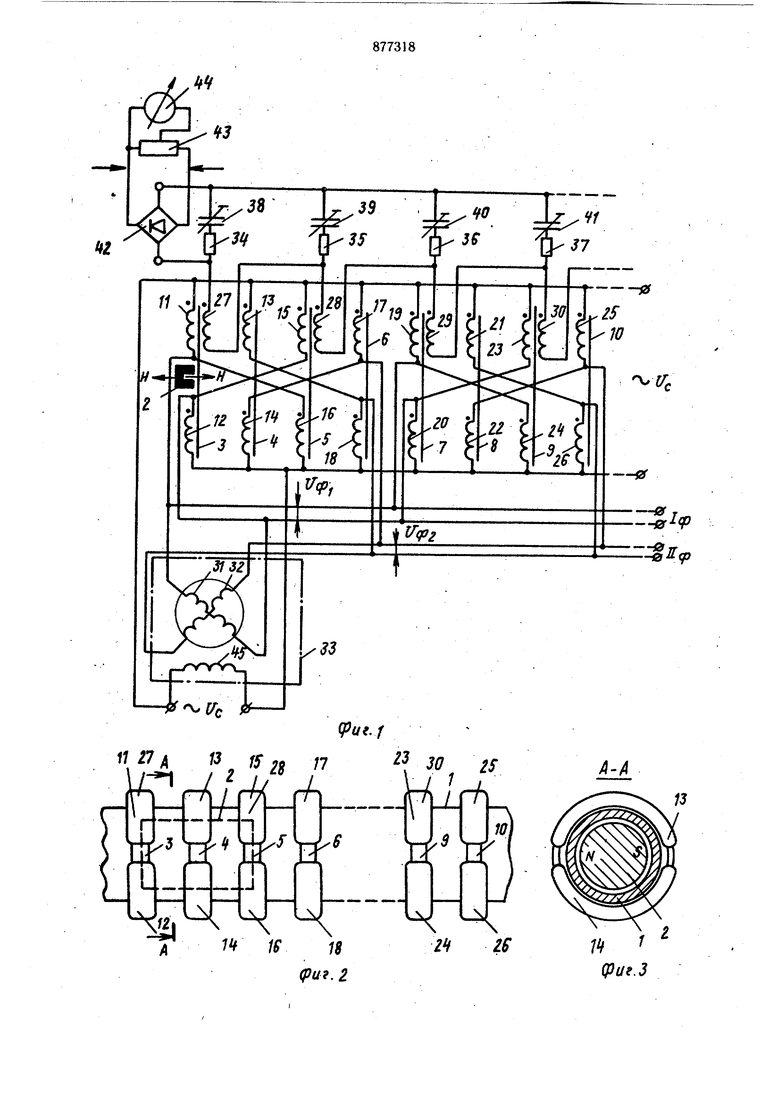
линейное перемещение магнита 2 преобразуется в поворот ротора сельсина приемника 33. При этом один оборот ротора сельсинаприемника 33 соответствует перемещению постоянного магнита 2, например, из положения 1-111 в положение V - VII или из положения II-IV в положение VI-VIIl и т.п. Число оборотов ротора сельсина-приемника 33-указателя перемещений устройства соответствует (без учёта краевого эффекта крайних тороидальных сердеТников) числу периодов Р фазных напряжений, которое укладывается на контролируемой длине L перемещения объекта.
Для исключения погрещности измерения перемещения контролируемого объекта при кратковременном пропадании напряжения vfe питания с помощью вспомогательных обмоток 27-30, размещенных на (тп+1) сердечниках, герконов 38-41, расположенных на трубе 1. устройства вблизи вспомогательных обмоток, и выпрямительного моста 42 формируется напряжение , с помощью которого определяется, в каком из р-ых периодов контролируемой длины L перемещений находится объект, так как Vecn2T+ VBCP-ZB + Vecn.igVVjti.o вспомогательные обмотки 27-30, индуктивно связанные с основными обмотками 11, 15, 19 и 23, размещенными на нечетных (mn+l) сердечниках, трансформируется вторичное напряжение. При вхождении постоянного магнита 2 в зону расположения очередного нечетного сердечника герконы 38--41, находящиеся вблизи этих сердечников, под действием магнитного потока постоянного магнита 2 поочередно замыкаются, вследствие чего на выходной диагонали выпрямительного моста формируется ступенчатой формы напряжение VM , которое через делитель 43 напряжения подается на аналогойый указатель 44 перемещений, являющийся вспомогательным (грубым) указателем перемещений. Например, при прохождении постоянного магнита 2 через положение I-111 замыкаются контакты герконов 38, 39. При этом напряжение на входе выпрямительного моста равно 0. При перемещении постоянного магнита 2 из положения I-111 в положение II-IV, что соответствует выходу постоянного магнита 2 из зоны сердечника 3, контакты геркона 39 по-прежнему будут замкнутыми, а контакты геркйна 38 разомкнутся. В этом случае напряжение V« на. выходе выпрямительного моста 42 скачкообразно изменится до величины, равной напряжению , благодаря появлению напряжения на обмотке 27 и т.п.
Резисторы 34-37 введены в цепь кон тактов герконов для исключения короткого замыкания обмоток 27-30. При линейном перемещении постоянного магнита 2 в противоположном направлении (например, из
положения IV-VI в положение 1П-V и т.п.), вследствие эффекта гистерезиса, точки срабатывания и отпускания контактов герконов будут несколько отличаться друг от друга, как это условно показано на графике Viti mf(L) пунктирными линиями.
Таким образом, с помощью вспомогательного аналогового указателя 44 перемещения обеспечивается ступенчатая (грубая) индикация фактического местоположения объекта в случае кратковремениого пропадания и последующего восстановления напряжения Vc в сети 1итання устройства, что повышает точность измерения.
При подключении к фазам устройства RC-цепочкй вместо индикаторного сельсииаприемника 33 устройство может быть использовано в качестве преобразователя перемещение-фаза, перемещение-амплитуда,. . что позволяет осуществить его связь с ЭВМ.
Формула изобретения
Устройство для дистанционного измере-. ния линейных перемещений по авт. св. № 135788, отличающееся тем, что, с целью повышения точности измерения, устройство снабжено вспомогательными последовательно соединенными обмотками, размещенными на (тп-ь1) тороидальных сердечниках, где ш - число фаз на выходе устройтва, п 0,1,2,3... - целые числа натурального ряда, герконами, размещенными в зоне действия этих обмоток на поверхности
рубы, и последовательно соединенными аналоговым указателем перемец1ений,делителвм напряжения и выпрямительным мостом, к входной диагонали которого подключены последовательно соединенные вспомогательные обмотки, одни контакты герконов соединены между собой и подклкзчены к одному из выводов цепи последовательно соединенных вспомогательных обмоток, а другие контакты герконов подключены через резисторы к точкам соединения вспомогательных обмоток данной цепи.
Источники информации,
принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 135788, кл. G 08 С 19/06, 1959 (прототип).
- vfTe ff11 17 A 13 ff2S (- I //
-Л
T
A-/(
w
U
tcnlA
Il Л
VBcn
L
(Put.f
