(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛ СЦЕПЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения сил сцепления | 1978 |
|
SU767625A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПЕРЕМЕННОГО ТОКА | 1966 |
|
SU222539A1 |
| Устройство для калибровки сейсмометрических каналов | 1977 |
|
SU693294A1 |
| БАРОМЕТРИЧЕСКИЙ ВЫСОТОМЕР | 2019 |
|
RU2725513C1 |
| Способ определения остаточных напряжений в образце методом непрерывного электрохимического травления и устройство для его осуществления | 1991 |
|
SU1810746A1 |
| Весы с электромагнитным уравновешиванием | 1978 |
|
SU687346A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКОГО СОПРОТИВЛЕНИЯ ЭЛЕКТРИЧЕСКИХ КОНТАКТОВ | 1973 |
|
SU370548A1 |
| ЕМКОСТНЫЙ ИЗМЕРИТЕЛЬ УРОВНЯ | 2001 |
|
RU2185605C1 |
| Устройство для измерения частотных характеристик диэлектрических свойств веществ | 1982 |
|
SU1051455A1 |
| ЕМКОСТНОЙ ИЗМЕРИТЕЛЬ УРОВНЯ ЖИДКОСТИ (ВАРИАНТЫ) | 2005 |
|
RU2300742C2 |
1
Изобретение относится к техничес- кой физике, точнее к устройствам для . измерения сил, и предназначено для исследования контактных взаимодействий конденсированных фаз.
Известно устройство для измерения сил, содержащее магнитоэлектрический преобразователь и снабженное опгтическим микроскопом для увеличения точности измерений путем учета реакции пружины преобразователя Ц.
Эти устройства имеют недостаточную точность и не позволяют автоматизировать измерения.
Наиболее близким по технической сущности к предлагаемому является устройство для измерения сил, содержащее электромеханический преобразователь магнитоэлектрической системы, соединенный с источником и измерителем тока, а также снабжено бесконтактным измерителем перемещения рамки преобразователя и системой управления, выполненной в виде двойного дифференциатора последовательно соединенного со ждущим мультивибратором, и реле с импульсным управлением, при зтом аыход измерителя перемещения связан со входом дифференциатора, выход мультивибратора соединен.
со входом запуска измерителя тока и через его переключатель режимов запуска - со входом реле, контакты которого включены параллельно преобразователю 2 .
Однако известное устройство сложно по конструкции, так как в нем отсутствует объективный контроль механических помех , необходимый при обра10ботке результатов-.
Цель, изобретения - упрощение конструкции и повышение достоверности измерения.
15
Указанная цель достигается тем, что устройство снабжено источником напряжения, цифровым вольтметром, измерителем напряжения и мостовой схемой, в плечо которой включен преобразова--
20 тель, в одну диагональ - источник.напряжения, а в другую дифференциатор, соединенный с измерителем напряжения, при этом выход мультивибратора подключен ко входу запуска цифрового вольт25метра и через его переключатель режимов запуска - к реле, при этом измерительный вход цифрового вольтметра подключен к источнику напряжения.
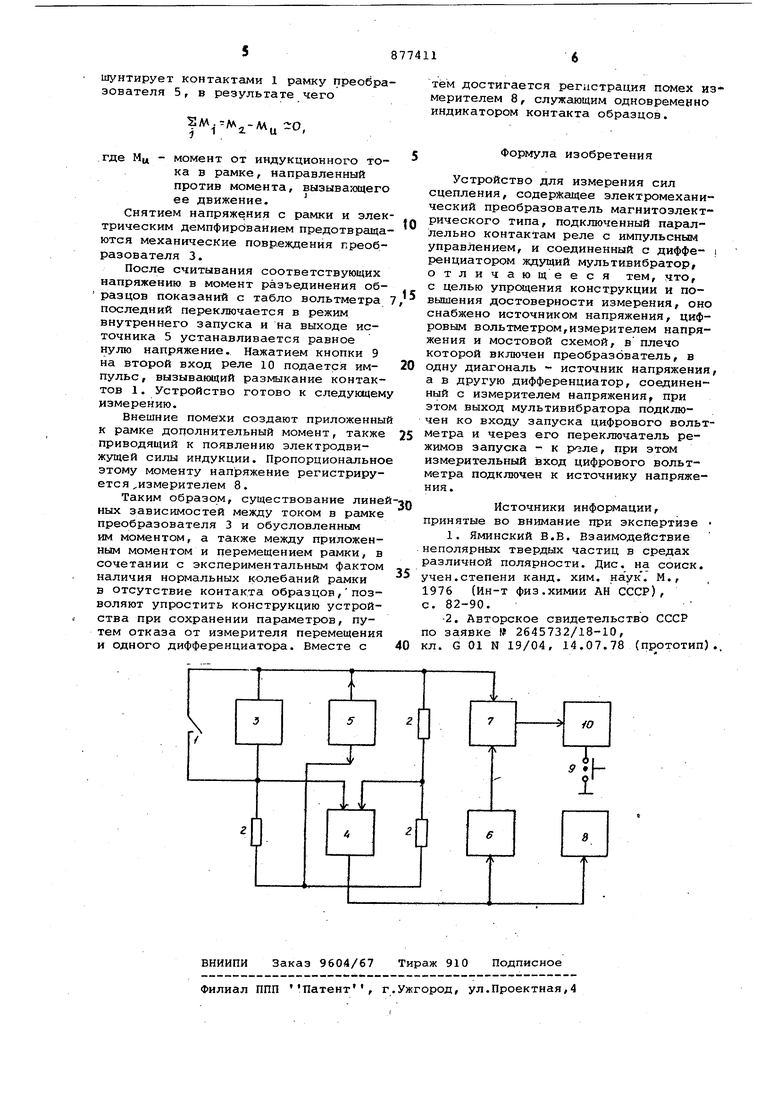
На чертеже схематически изображено
30 предлагаемое устройство. Устройство содержит контакты I реле, компоненты 2 моста, электромеханический преобразователь 3, дифференциатор 4, источник 5 напряжения, ждущий мультивибратор б, .цифровой йольтметр 7, измеритель 8 напряжения, кнои ку 9 и реле 10 с импульсным управлением. Устройство состоит из включенного в плечо уравновешенного моста с компо нентами 2, электромеханического преобразователя 3 магнитоэлектрической системы, внизу подвижной рамки кото-, рого укреплен образец. Второй образец установлен на микроманипуляторе около перво ; о. В диагонали моста включены источник 5 напряжения с цифровым вольтметром 7 и дифференциатор 4, сое диненный с измерителем напряжения (ос циллографом) 8 и ждущим мультивибратором б, выход которого через переклю чатель режимов запуска вольтметра 7 соединен с первым входом реле 10 с импульснымуправлением. Со вторым вхо дом реле 10 соединена кнопка 9, а кон такты 1 реле 10 включены параллельно преобразователю 3. Устройство работает следующим обра ,зом. Электрический ток источника 5 проходит через рамку преобразователя 3, создавая приложенный к ней момент, величина которого пропорциональна силе тока 3 где и - напряжение источника 5, измеряемое вольметром 7 в режиме .с внутренним запуском, R - сопротивление резистора 2, включенного последовательно с преобразователем 3 в плечо моста; Rp- сопротивление рамки преобразо вателя 3. Указанный момент уравновешивается моментами взаимодействия образцов и реакции пружины преобразователя 3. Последний обусловлен конечным расстоянием X между образцами в исходном положении. Под действием тока в рамке соединенный с ней образец сначала перемещается на это расстояние, деформируя пружину, а затем поджимается ко второму образцу. Сила поджима Fp определяется из условия равенства нулю суммы моментов, приложенных к рамке преобразователя 3, по формуле п- а момент, обусловленный действием тока; момент реакции пружины; - расстояние от оси вращеияя рамки до точки касания образцов , причем W,-i,(U)u; .скЖ, где k , kj - экспериментально определенные коэффициенты,констан ты. В отсутствие контакта между образцами рамка преобразователя 3 совершает нормальные колебания, в результате чего в диагонали моста выделяется напряжение, пропорциональное электродвижущей силе индукции преобразователя 3, которая, в свою очередь, пропорциональна dx/dt (t-время). Это напряжение дифференцируется по времени дифференциатором 4, затем измеряется измерителем 8 и поступает на вход ждущего мультивибратора б. С учетом сказанного, величину М определяют по формуле .Ui, где и2 напряжение, измеренное вольтметром 7 во время уменьшения показаний измерителя 8 до нуля. После измерения силы поджима, вольтметр 7 переключается в режим с внешним запуском, напряжение источни-. ка 5 уменьшается но нуля и затем меняет знак. Сила разъединения образцов FP определяется по формуле 1 где М - момент, обусловленный действием тока. Таким образом, для определения Fp нужно измерить или напряжение источника 5 во время разъединения образцов. Управление движения рамки имеет вид где: М- - моменты, приложенные к рамке; l - момент инерции рамки. До разъединения образцов а1У1, и. соответственно d x/dt 0,а во время разъединения +М j и рамка движется с ускорением.Пропорциональное напряжение запускает мультивибратор б,выходной импульс с нормированными параметрами запускает вольтметр 7 и через его переключательрежимов, запуска поступает на первый вход реле 10.Оно с задержкой на время измерения напряжения вольтметром 7
