1
Изобретение относится к технике измерения неэлектрических величин и может быть использовано при построении телеметрических систем одновременного контроля силовых и температурных воздействий на исследуемый объект.
Известен пьезоэлектрический преобразователь, содержащий два пьезорезонатора,. укрепленных на торцевых выступах упругого кольца и подключенных к двум автогенераторам.Измеряемое усилие при-кладывается к кольцу. Закрепление резонаторов на кольце дифференциально по отношению к прилагаемому усилию .
Известное устройство в значительной мере устраняет температурную погрешность измерения, однако не позволяет проводить одновременные из Ьрения температуры и силовых усилий.
Наиболее близким по технической сущности и достигаемому результату к данному изобретению является пьезоэлектрический преобразователь,содержащий двухпараметровый частотный датчик, выходы которого соединены с входами первого и второго автогенераторов и два реверсивных счетчика f2.
Известное устройство позволяет производить одновременные измерения температурных и силовых воздействий на исследуемый объект, однако имеет недостаточную точность измерения,что объясняется следующими факторами.Девиация высоких частот генерации f и f во всем диапазоне изменения воздействующих на двухпараметровый частотный датчик параметров Р и Т достигает порядка 1% относительно частот генерации fj,,j и fQy при начальных условиях.
и
Частоты fj, к f в известном преобразователе преобразуются в коды, с которыми проводят дальнейшие вычислительные операции.
Полезная информация об измеряемых
20 параметрах находится следовательно в младших разрядах преобразователей частота-код, 99% преобразуемой информации не является полезной. Необходимая точность измерения может быть
25 достигнута при использовании высокоразрядных преобразователей частотакод, однако подобного рода усложнения приводят к уменьшению надежности схемной реализации, повышению числа
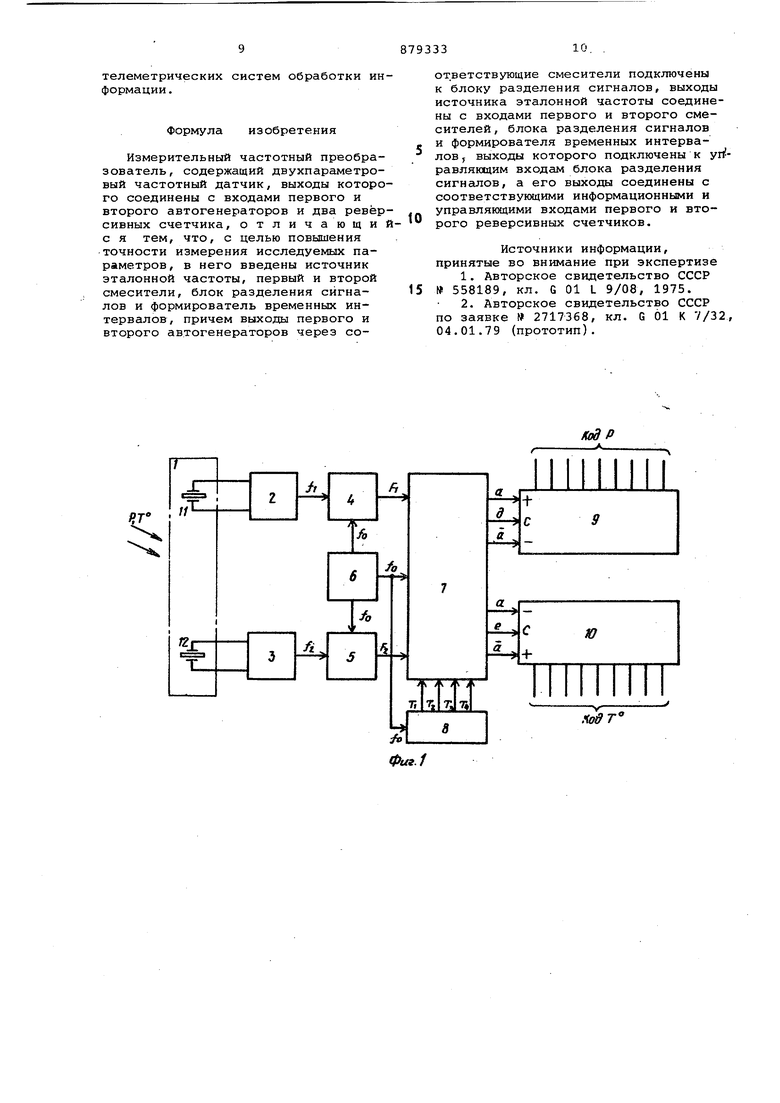
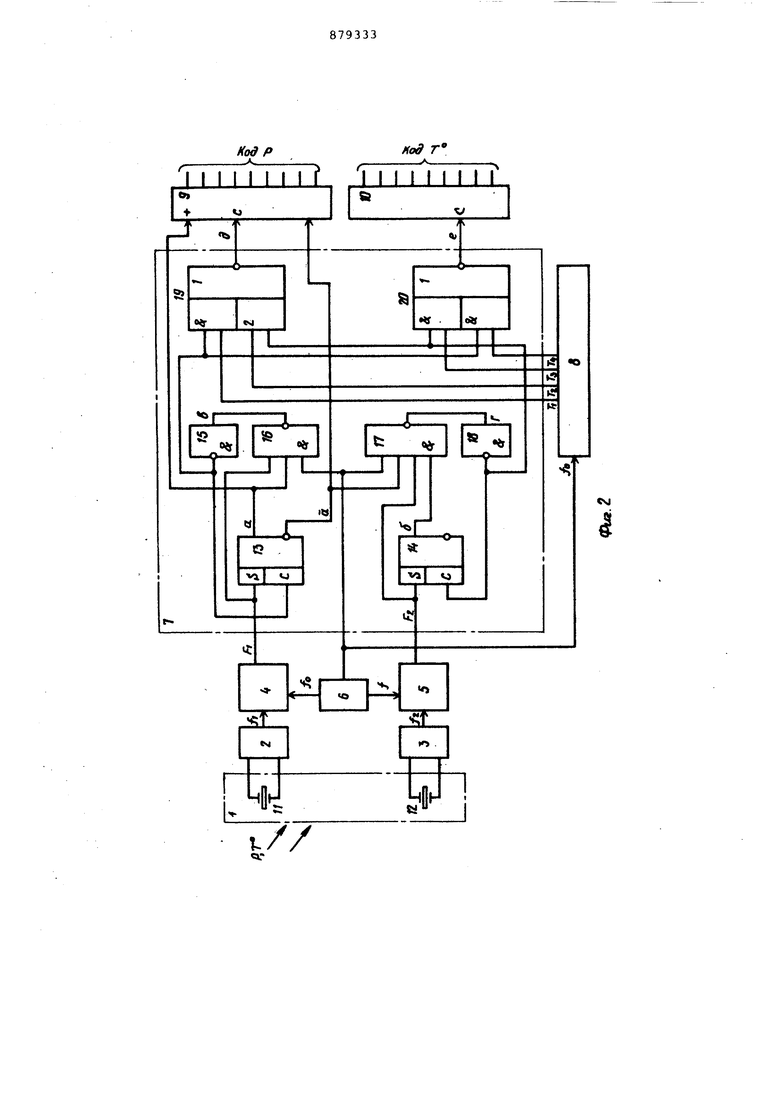
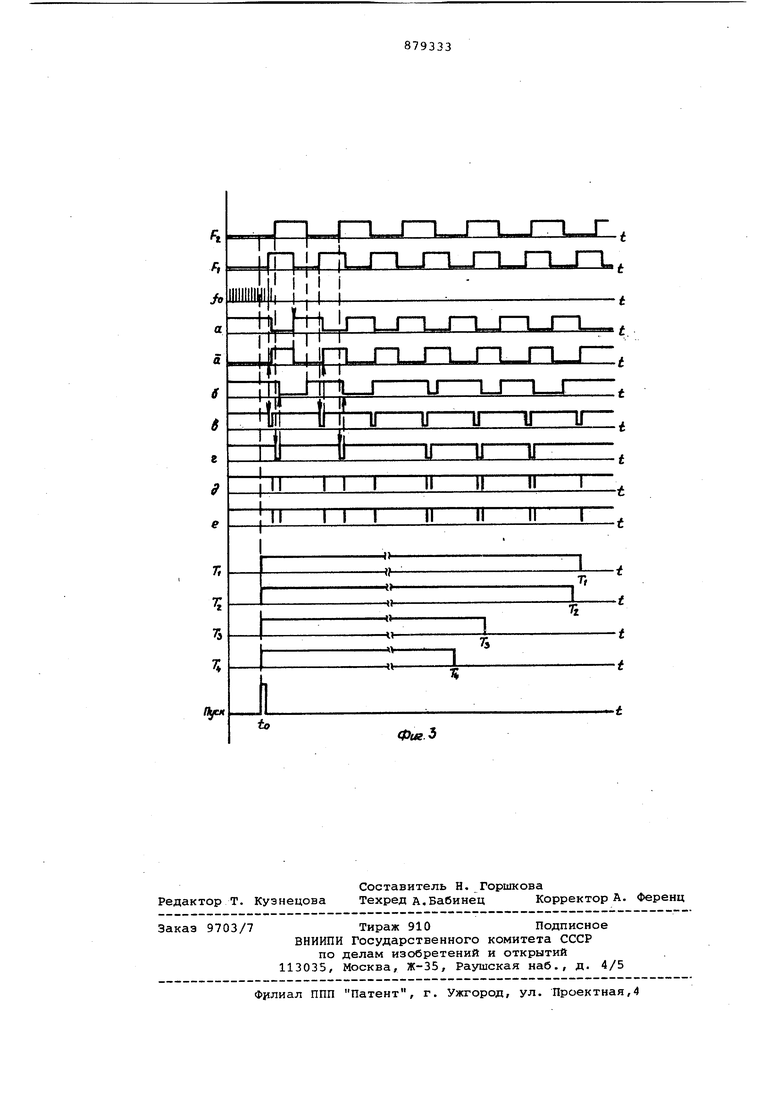
30 сбоев за одно измерение и, следовательно, к снижению точности определения исследуемых параметров f и Т Целью изобретения является повышение точности измерения исследуемых параметров. Цель, достигается тем, что в известный преобразователь,содержащий йвухпараметровый датчик, выходы которого соединены с входами первого и второго автогенераторов и два реверсивных счетчика, введены источник эталонной частоты, первый и второй смесители, блок разделения сигналов и формирователь временнЕлх интервалов , причем первого и второго автогенераторов через соответствую щие смесители подключены к блоку раз деления сигналов, выходы источника эталонной частоты соединены с входами первого и второго смесителей, блока разделения сигналов и формирователя временных интервалов,выход которого подключены к управляющим вх дам блока разделения сигналов, а его выходы соединены с соответствующими информационными и управляющими вход ми первого и второго реверсивных счетчиков. На фиг. 1 показана функциональная схема преобразователя для общего слу чая, когда коэффициенты термо- и силочувствительности кварцевых резонаторов положительны; на фиг..2 - функ циональная схема преобразователя с конкретным вьтолнением узла разделения сигналов для случая, когда один из коэффициентов силочувстзительност отрицателен; на фиг. 3 - диаграммы работы преобразователя, поясняющие принцип измерения параметров Р и Т Частотный измерительный преобразователь состоит из двухпараметрового частотного датчика. 1, первого 2 и второго 3 автогенераторов,подключенных к датчику 1, первого 4 и второго 5 смесителей одни из входов которых соединены с выходами соответствующих автогенераторов. Смесите ли 4 и 5 предназначены для выделения .сигналов частоты, при смешивании высокочастотных колебаний fj, и f, с колебаниями эталонной частоты f поступающими с выхода источника эта лоннор частоты 6 на входы смесителей ,4 и 5. Информационные входы блока 7 разделения сигналов подключены к вы ходам первого 4 и второго 5 смесителей и к входу источника эталонной частоты б, выход которого подключен к Biiko«y формирователя 8 временных интервалов. Блок 7 предназначен для разделения во времени импульсов час тот fj, 2./ ЧТО является необходимьлм при совмещении во времени операций суммирования и вычитания в реверсивных счетчиках, в качестве которых используются счетчики 9 и 1 на фиг.1 и в качестве счетчика 9 на фиг.2. При одновременном считывании импульсов частот 1;/ и Fj счетчиком 10 (фиг.2) блок 7 необходим для предотвращения сбоев и потери информации в момент совпадения во времени форнотов измеряемых импульсов. Выходы формирователя 8 подключены к управляющим входам блока 7. Формирователь временных интервалов 8 по сигналу Пуск из импульсов эталонной частоты f формирует одиночные импульсы длительностей Т. , Т , Т„ , TV . В течение длительностей этих импульсов подсчитываются импульсы частот F и Fj в соответствии с алгоритмом вычисления. Информационные входы С и управляющие входы плюс и минус счетчиков 9 и 10 подключены к соответствующим выходам блока 7 разделения сигналов. Счетчики 9 и 10 предназначены . для преобразования в коды информации о параметрах Р и т появляющейся в результате считывания импульсов частот 1 и Р„ согласно алгоритму вычисления. Чувствительными элементами двухпараметрового частотного датчика 1 является кварцевые резонаторы 11 и 12. Кроме того, на фиг. 2 показано выполнение блока 7 разделения сигналов в виде двух триггеров 13 и 14, инвертора 15, элемента 16, элемента 17, инвертора 18, элемента 19 и элемента 20. Блок 7 реализован для случая, когда fj, f и длительность импульсов эталонной частоты значительно меньше длительностей импульсов частот (фиг.З). Измерительный частотный преобразователь работает следукяцим образом. Используемые в качестве чувствительных элементов кварцевые резонаторы LC-срезов имеют линейные зависимости частот резонансов от температурных и силовых воздействий. При этом можно записать , F/V1 F-J. текущие частоты датчиков, полученные в результате гетеродинирования высокочастотных колебаний и f.; 02,04 начальные частоты генерации при начальных значениях воздействующих параметров Р и f; ,, 0(22. коэффициенты термочувствительности , Гц/град; P-n,C(2.-i коэффициенты силочув 5 ствительности, Гц/Hj Р, ti - приращения измеряемых параметров. Систему уравнений (1) пр зуем к виду лР,са,,,дТ° , ..лЛ после чего запишем обратное зование. Ого- .г 1 Л - TO - Vvf Л- дискриминант уравне гч- о Коэффициенты термо- и сил тельности, деленные на дискр имеют размерность соответств Н/Гц и град/Гц, что дает воз перейти от системы уравнений следующей системе уравнений P-T,. .-V. где Т , Тд,, Т , Т - времена ния соответствующих частот; Т- д , т Sia2. Д Система уравнений (4) записана д измеряемых параметров и текущих ча тот датчика с учетом того, что Р-РО + РЛ , Т° Т°-«-ДТ, 2-Р2о Д.Рй Фиг,1 иллюстрирует практическую реализацию алгоритма вычисления,за ложенного в формуле (4), автогенера торы. 2 и 3 работают на частотах и fj, задаваемых кварцевыми резонато рами 11 и 12. Сигналы с частотами и f подаются в смесители 4 и 5, где смешиваются с эталонной частотой fjj , поступающей с выхода источника эталонной частоты 6. Разностные частоты двух колебаний 1 () и fJz. ° ( подают ся в блок 7 разделения сигналов. Непосредственно перед началом из мерений по известным коэффициентам термо- и силочувствительности рассчитываются времена Т, ; в соответствии с системой уравнеНИИ (3) и (4). Формирователь временных интервалов настраивается на формирование расчитанных временных интервалов по сигналу Пуск. В течение времени Т импульсы частоты f подаются на реверсивного счетчика 9, где считываются на суммирование. В течение времени То импульсы частоты f подаются на счетчик -9, где считываются на вычитание. Аналогичным образом происходит- считывание импульсов частот Fj| и Р согласно второму уравнению системы уравнений (4). Результат, записанный в реверсивных счетчиках 9 и 10 (фиг.1) представляет собой,в частности, двоичный код параметров Р и Т. Причем в соответствие с алгоритмом вычисления (4) приращение на единицу младшего разряда в двоичном коде соответствует приращению температуры и силы на 1 град и 1Н. Следовательно погрешность измерения температуры составляет 1 град., погрешность измерения еилы составляет 1 Н. Для уменьшения погрешности измерения температуры -в п раз, силы в m раз, необходимо ув.еличить времена измерения соответственно L и в m раз, Тд и L в п раз. Устанавливая кварцевые резонаторы 11 и 12 по отношению к воздействукадей силе.таким образом, чтобы коэффициент силочувствительности имели противоположные знаки, а именно а О, а О и учитывая последние допущения в системе уравнений (4), получим Р т F/ - TaFi Л -t т X. л. , v Из соотношений (3) видно, что дискриминант уравнения максимален в случае, когда один из коэффициентов силочувствительности отрицателен. В свою очередь увеличение дискриминанта приводит к уменьшению времен , Т , Tj , Tjj. Таким образом повышается быстродействие измерения параметров Р и т Фиг.2 иллюстрирует реализацию алгоритма вычисления, заложенного в формуле (5). Отличие двух преобразователей состоит в использовании в первом (фиг.1) двух реверсивных счетчиков, а во втором (фиг. 2) одного ре:версивного счетчика 9 и одного счет-чика 10. Процесс вычисления поясняется эпюрами фиг.З и сводится к следующему. В исходном состоянии, после включения напряжения питания, неинвертирующие выходы триггеров 13 и 14 находятся в состоянии логической единицы (фиг. За,б). Генератор опорной частоты 6 генерирует импульсы с частотой f , поступающие на элемент 17 и на вход формирователя 8 временных интервалов. В исходном состоянии выходы формирователя 8 находятся в состоянии логического нуля (фиг.З Т Til Тз, Т) при этом элементы-ключи 19 и 20 закрыты для прохождения информационных импульсов с выходов интервалов 15 и 18. Реверсивный счет чик 9 и счетчик 10 обнулены и готовы к считыванию информации с выходо блока 7. В соответствии с алгоритмом вычитания (5) на суммирование в реверсив ный счетчик 9 в процессе измерения поступают импульсы частоты F в тече ние времени Tj , а на вычитание - импульсы частоты F в течение времени Tj. Счетчик 10 в течение времени Т считывает импульсы частоты F , в течение времени импульсы частоты F Отсчет временных интервалов J , . Тз Тф начинается после подачи внешней команды Пуск, по которой на S входы триггеров 13 и 14 начинают поступать импульсы частот Fj и f соответственно. По первому импульсу частоты , с выхода генератора опорной частоты 6 формирователь 8 начинает формировать импульсы положи тельной полярности Т ; Т ; Т, Передними фронтами этих импульсов открываются элементы 19 и 20 для прохождения информации с выходов инверторов 15 и 18 на входы счетчиков 9 и 10. Элемент 16 открыт триггером 13, элемент 17 закрыт триггером 13. Следовательно, с появлением на S входах триггеров 13 и 14 двух положительных импульсов частот Fj и F на выходе д узла 7 появится логический нул на время, равное длительности импуль са частоты ff,, поступающего на элементы 16 и 17. В это время выход е, узла 7 остается в состоянии логической единицы. Тем caMfcjM обеспечивается приоритет операции суммирования перед операцией вычитания в реверсивном счетчике 9, поскольку выходы ,д и , эле ментов 19 и 20 подключены непосредственно ко входам счетчиков 9 и 10. На фиг. 3 условно принято, что пе реброс триггеров в обратное состояни и считывание импульсов счетчиками 9 и 10 происходит по отрицательным фронтам импульсов. Пусть на первый триггер 13 посту пает положительный импульс частоты Р , чем на второй триггер 14 поступает импульс частоты F (фиг.ЗХ Т2 - первые импульсы) . Элемент 16 от крых для инвертирования импульсов с выхода генератора 6. На выходе л узла 1 появляется импульс (фиг.Зд) длительностью равной длительности им пульса частоты fj, , Импульс (фиг.Зд первый импульс) записывается на суммирование в счетчиках 9 и 10. Импульс (Зв) инвертируется инвертором 15. Отрицательным фронтом этого импульса триггер 13 перебрасывается счетному входу в противоположное состояние. На неинвертирующем выходе триггера 13 появляется логический нуль. Элемент 16 закрывается.Элемент 17 открывается по входу, связанному с инвертирующим вв кодом триггера 13 При наличии на S входе триггера 14 положительного импульса частоты F2 на выходе элемента 17 г появляется импульс длительностью равной длительности импульса частоты fj, (фиг.Зг - первый импульс). Этот импульс через инвертор 18 и элементы 20 и 19 поступает на счетный вход счетчика 9, где записывается на вычитание и на счетный вход счетчика 10, где суммируется с первым пришедшим импульсом. На фиг. Зд,е показаны импульсные последовательности, записываемые счетчиками 9 и 10. Аналогичным образом разделяются сигналы с частотами и F.2. в случаях, когда импульс частоты F2. поступает на S вход триггера 14 раньше, чем на S вход триггера 13 поступает импульс частоты F . Однако во всех случаях импульс частоты f , соответствующий импульсу частоты F на выходах д и е, появляется раньше импульса частоты fj, , соответствующего импульсу частоты Fj. (фиг.3в,г). Таким образом измерительный частотный преобразователь основан на гетеродинировании высоких частот f и f2 генерации автогенераторов с последующим вычислением параметров Р и Т° путем подсчета импульсов частот ff и fjj, за определенные интервалы времени Т , 1, Т, Т . Путем гетеродинирования можно достичь полезной девиации частоты порядка 100%, однако практически достаточно преобразовать спектр сигнала до полезной девиации порядка 50% относительно начальных частот FQ и FOZ Подобного рода перенос спектра в сторону более низких частот позволяет значительно уменьшить число разрядов счетчиков 9 и 10 и оперировать непосредственно с частотным сигналом, а не с его кодом, как это делается в известном преобразователе. Следовательно, устранением промежуточного частота-код преобразования и значительным уменьшением числа разрядов счетчиков путем генеродинирования высоких частот колебаний f и f g. повышается точность измерения параметров Р и Т . Отсутствие в предлагаемом преобразователе таких сложных узлов, как вычислительного устройства, реализующего функцию перемножения вектора сигнала исследуемых параметров на обратную матрицу коэффициентов (5) и запоминающего устройства, в котором хранится обратная матрица коэффициентов (5), значительно упрощает предлагаег.1ый преобразователь по сравнению с известными решениями и дает возможность использовать его при построении автономных телеметрических систем обработки ин формации. Формула изобретения Измерительный частотный преобразователь, содержащий двухпараметровый частотный датчик, выходы которо го соединены с входами первого и второго автогенераторов и два ревер сивных счетчика, отличающи с я тем, что, с целью повышения точности измерения исследуемых параметров, в него введены источник эталонной частоты, первый и второй смесители, блок разделения сигналов и формирователь временных интервалов, причем выходы первого и второго автогенераторов через соот.ветствующие смесители подключены к блоку разделения сигналов, выходы источника эталонной частоты соединены с входами первого и второго смесителей, блока разделения сигналов и формирователя временных интервалов , выходы которого подключены к управляющим входам блока разделения сигналов, а его выходы соединены с соответствующими информационными и управляющими входами первого и второго реверсивных счетчиков. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 558189, кл. G 01 L 9/08, 1975. 2.Авторское свидетельство СССР по заявке 2717368, кл. G 01 К 7/32, 04.01.79 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительный частотный преобразователь | 1982 |
|
SU1068739A2 |
| Частотный измерительный преобразователь | 1981 |
|
SU972263A1 |
| Двухпараметровый частотный измерительный преобразователь | 1980 |
|
SU900126A1 |
| Частотный измерительный преобразователь | 1982 |
|
SU1080034A2 |
| Дифференциальный струнный акселерометр | 1986 |
|
SU1385080A1 |
| Измерительный частотно-импульсный преобразователь | 1985 |
|
SU1302149A1 |
| Цифровое устройство для обработки информации частотных датчиков | 1984 |
|
SU1239622A1 |
| Устройство для измерения температуры и давления | 1984 |
|
SU1204969A1 |
| Частотный измерительный преобразователь | 1983 |
|
SU1103091A1 |
| Цифровое устройство для обработкииНфОРМАции дВуХпАРАМЕТРОВыХ чАСТОТНыХдАТчиКОВ | 1979 |
|
SU851279A1 |
Р,Г
Ч
Код Р /.
Код Г
