представляет собой результирующую последовательность импульсов напряжения секций обмотки якоря. Усредненную величину падения напряжения на активном сопротивлении секции обмотки-якоря алгебраически складывают с результирующей последовательностью и по полученным точкам проводят кривую распределения магнитного поЛя, позволяющую судить о величине IviarHHTHOft индукции воздушного зазора машины.
Однако известному способу присуща низкая точность определения кривой, магнитного поля, это происходит вследствие того, что кривая соответствует не мгновенному значению магнитной индукции в какой-либо определенной точке воздушного зазора мащины, а. ее среднему значению на расстоянии коллекторного деления, если в пазуякоря находится одна секция.
Целью настоящего изобретения явля ется повышение точности определения кривой магнитного поля.
Поставленная цель достигается тем что при определении кривой магнитного поля электрических машин постоянного тока способом, заключающимся в измерении непрерывных последовательностей импульсов напряжения, получении из них результирующей последовательности и алгебраическом суммировании р ней величины падения напряже ния на активном сопротивлении секции из каждой измеренной непрерывной последовательности выделяют поочередно импульс, соответствующий выбранной секции обмотки, якоря,- из отобранных импульсов получают результирующую последовательность и алгебраическое суммирование производят по величине падения напряжения на активном сопротивлении выбранной секции.
Заявляемый спо-соб реализуется устройством, содержащим индикатор и установленные в щеткодержателе на расстоянии шага обмотки якоря щетки, ширина каждой из которых меньше ашри ны межламельной изоляции, которое снабжено синхронизатором импульсов напряжения и включенным между индикатором и щетками электронным коммутатором. При этом выходы синхронизатоpa подсоединены к управляющим входам коммутатора и- индикатора.
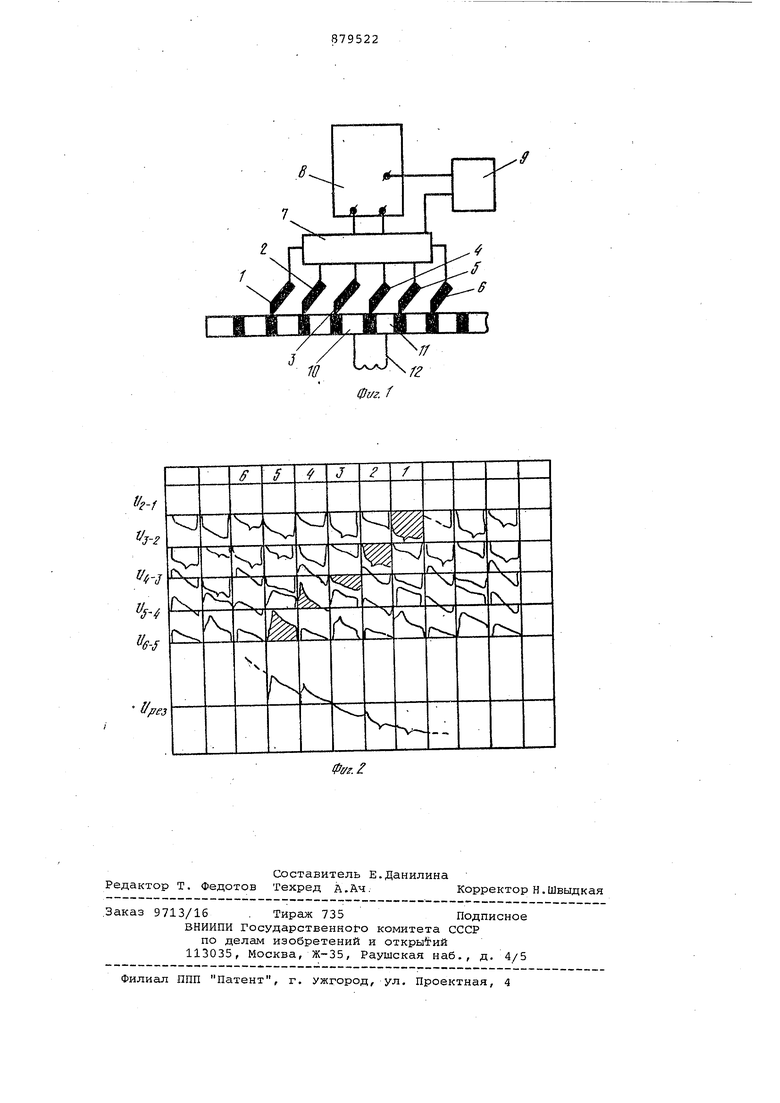
На фиг. 1 представлены общий вид устройства, установленного на коллекторе машины постоянного тока, и его структурная схема; на фиг. k; изображены временные диаграммы импульсов напряжения.
Устройство для реализации заявляемого способа (фиг. i) содержит щетки 1-6, образующие пять пар -соседних ще ток, закрепленные в общем щеткодержателе (на чертеже не показан) так,что при установке на коллектор машины между ними обеспечивается расстояние равное шагу обмотки якоря испытуемой
электрической машины постоянного тока. Ширина каждой из щеток меньше ширины межламельной изоляции. Каждая пара щеток подключена через электронный коммутатор 7 к входу индикатора
8напряжения, в качестве которого может быть использован электронный осциллограф. Индикатор 8 предназначе для измерения непрерывных последовательностей импульсов напряжения и получения из них результирующей последоватёльности. Принцип работы коммутатора 7 аналогичен принципу работы обычного шагового искателя, предназначенного для переключения электроцепей, но обеспечивает большее быстродействие.
Устройство также содержит синхронизатор 9 импульсов, соединенный с управляющими входами индикатора 8 напряжения и электронного коммутатора 7 и предназначенный для синхронизации их работы.
Для иллюстрации работы заявляемого устройства на фиг. 1 изображены коллекторные пластины 10, 11 и соединенная с ними своими концами секция 12 обмотки якоря.
. Способ реализуется устройством следующим образом.
Устанавливают щеткодержатель со щетками 1-6 на коллектор испытуемой машины постоянного тока.
Приводят во вращение якорь обычным путем, например, подачей напряжения на коллектор.
Для определения картины магнитного поля этой машины на участке окружности якоря, соответствующем участку коллектора между щетками 1-6 настраивают синхронизатор импульсов на одну из секций обмоток якоря, концы которой соединены с коллекторными пластинами 10, 11 указанного участка. Например, настраивают синхронизатор 9импульсов на секцию 12 с тем, чтобы использовать ее импульс напряжения для снятия кривой магнитного .
При вращении якоря коллекторные пластины 10-11, с которыми соединена секция 12 обмотки якоря, подходят к ще-ткам 1, 2. В этот момент синх гонизатор 9 импульсов посылает на электронный коммутатор- 7 электрический сигнал разрешения для прохождения к входу индикатора 8 импульса напряжения с щеток 1, 2, снятого ими с секции 12. При прохождении коллекторных пластин 10, 11 под щетками 1, -2 на индикатор 8 напряжения поступает один импульс напряжения секции 12.
При подходе коллекторных пластин 10, 11 к щеткам 2, 3 синхронизатор
9имп льсов подает на электронный коммутатор 7 сигнал разрешения для прохождения к входу индикатора 8 импульса напряжения с щеток 2,3. Аналогичные операции осуществляются при прохождении коллекторных пластин 10, 11 под щетками 3, 4, 4, 5 и 5, 6. Таким cipasoM, на экране индикатора 8 получают результирующую посл довательность импульсов напряжения UpsJ соответствующую выбранной секции 12 и состоящую из последовательности импульсов напряжения 2-т ъ-4- (, снятых соответственно с щеток 1-2, 2-3, 3-4, 4-5, 5-6 и показанных штриховкой на фиг. 2. Когда к щеткам заявляемо го устройства подходят все прочие секции обмотки якоря, импульсы напр жения от них не проходят через элек ронный коммутатор 7 на вход индикат ра 8 напряжения, т.к. синхронизатор 9 импульсов не.дает сигналов разрешения на их прохождение. Эти, не пр шедшие через электронный коммутатор 7, импульсы напряжения от других се ций обмотки якоря показаны -без штри ховки на фиг. 2. Для получения устойчивого изобра жения результирующей последовательности импульсов напряжения выбранно секции 12 на экране индикатора 8 напряжения синхронизатор 9 импульсов дает один сигнал разрешения на запуск развертки индикатора за один оборот якоря машины. Далее производят операцию алгебра ического суммирования Up93 и величины падения напряжения на активном сопротивлении секции 12. Лля этого результирующую последовательность импульсов напряжения смещают относительно нулевой линии на экране индикатора 8 на величину падения напряжения на активном сопротивлении секции 12. Полученная кривая дает достоверную картину магнитного поля машины постоянного тока на определенном . участке ее воздушного зазора, соответствующем определенной секции обмотки якоря. Для определения кривой магнитного поля на другом участке, соответствующем другой секции, синхронизатор 9 настраиваю на эту . , и все операции повторяют вышеописанным способом. Кривая магнитного поля позволяет определить условия коммутации мсшшны постоянного тока, т.к. по виду и характеру этой кривой можно судить о необходимости сдвига щеток машины в одну или другую сторону. Поскольку заявляемый способ основан на измерении не усредненных значений, а мгновенных значений импульсов напряжения, он обладает высокой точностью определения кривой и может быть использован при настройке коммутации машин. Формула изобретения 1.Способ определения кривой магнитного поля электрических машин постоянного тока, заключающийся в измерении непрерывных последовательностей импульсов напряжения, получении из них результирующей последовательности и алгебраическом суммировании с ней величины падения напряжения на активном сонротивлении секции, отличающийся тем, что, с целью повышения точности определения кривой магнитного поля, из каждой измеренной непрерывной последовательности выделяют .поочередно импульс, соответствующий выбранной секции обмотки якоря, из отобранных импульсов получают результирующую последовательность импульсов и алгебраическое суммирование производят по величине дадения напряжения на активном сопротивлении выбранной секции. 2.Устройство для осуществления способа по п. 1, содержащее индикатор и установленные в- щеткодержателе на расстоянии обмотки якоря щетки, ширина каждой из которых меньше ширины межламельной изоляции, отличающееся тем, что оно снабжено синхронизатором импульсов напряжения и включенным между индикатором и щетками электронным коммутатором, при этом выходы синхронизатора подсоединены к управляющим входам коммутатора и индикатора. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 233948, кл. GOIR 33/10, 1967. 2. Заявка Японии № 52-13283, л. Н 02 Р 7/00, 1971 (прототип).
10
/ В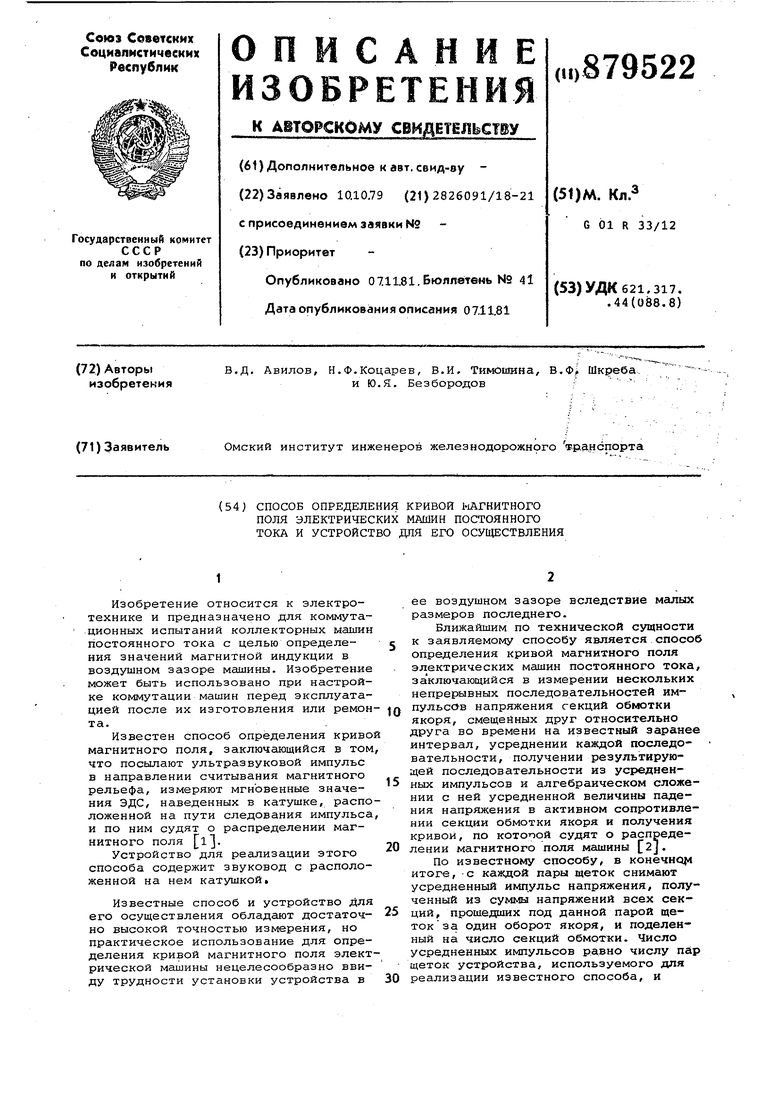
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения мгновенных значений токов в коммутируемой секции коллекторной электрической машины и устройство для его осуществления | 1976 |
|
SU591987A1 |
| Устройство для анализа коммутации коллекторных электрических машин постоянного тока | 1973 |
|
SU501449A1 |
| ЯВНОПОЛЮСНЫЙ КОЛЛЕКТОРНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2010 |
|
RU2414796C1 |
| КОЛЛЕКТОРНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ С ПОЛЮСНЫМ ЯКОРЕМ | 2009 |
|
RU2390087C1 |
| Машина постоянного тока | 1990 |
|
SU1725324A1 |
| КОЛЛЕКТОР ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2006 |
|
RU2319267C1 |
| КОЛЛЕКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЯКОРЕМ | 2009 |
|
RU2390088C1 |
| ЯВНОПОЛЮСНАЯ КОЛЛЕКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414797C1 |
| СПОСОБ ПРОВЕРКИ ЯКОРЕЙ КОЛЛЕКТОРНЫХ ЭЛЕКТРИЧЕСКИХ МАШИН | 1964 |
|
SU162226A1 |
| КОЛЛЕКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА ПОСТОЯННОГО ТОКА С ПОЛЮСНЫМ ЯКОРЕМ | 2009 |
|
RU2385525C1 |