Изобретение относится к устройствам контроля состояния машин, аппаратов -и объектов и может быть исполь зовано в различных отраслях промыиленности для автоматизированных систем управления технологическими процессами, в состав которых входят сое редоточенные, распределенные и определенным образом включаемые объекты управления. Известно устройство для контроля и регистрации работы аппаратуры, содержащее блок вывода сигналов, обеспечивающий вывод подлежащих регистрации сигналов на пишущую машину; в блок вывода сигналов входят соеяинеиные последовательно приемни ки сигналов контроля, схемы И, схемы ИЛИ и блоки управления электромагни тамк пишущей машины, количество кото рых определяется числом подлежащих регистрации сигналов; в блок вывода сигналов входят такж« схема ИЛИ, вх ды которой подключены , к выходам приемников сигналов контроля, и схе ма ИЛИ, входы которой подключены к илводам схема И. Устройство содержит также формирователь импульсов, который вырабатывает сигнал, несущий информацию о времени. Подлежащие регистрации сигналы контроля объединены в группы. Для каждой группы сигналов контроля имеется соответствующий приемник; при изменении значе.ния какого-либо сигнала контроля, входящего в группу, соответствующий приемник сигналов контроля вырабатывает сигнал запуска, поступающий на схему И, в которую также заводятся импульсы с распределителя, обеспечивающие необходимую последовательность опроса сигнгшов контроля и группы, и разрешающий сигнал с третьей схемы ИЛИ 1. Недостатком данного устройства является необходимость дополнительного времени работы устройства из-за ложных срабатываний, вызываемых помехами в линии связи. Помехи в линии связи изменяют значение сигнала контроля, что приводит к срабатыванию приемника сигналов контроля; последний вырабатывает сигнал запуска, по которому устройство регистрирует сигналы контроля группы. Регистрация информации из-за ложных срабатываний повышает износ электроуправляемой пишущей маишны. Нг1иболее близким к предлагаемому по технической сущности является
устройство для контроля состояния оборудования, содержащее первый,лсточник напряжения, первый блок контактных датчиков, выход которого соединен с первым входом аналогового сумматора, первый коммутатор, преобразователь аналог - код и вычислительную машину. Работу каждой единицы контролируемого оборудования в группе характеризуют связанные
с ней контакты, включение которых обозначает, что данная единица работает, отключение - единица не работает. Напряжение источника поступает через контакты на вход аналогового сумматора. На выходе сумматора появляется сигнал, пропорциональный числу работающих единиц оборудования в группе. Этот сигнал через коммутатор, опрашивающий последовательно все группы контролируемого оборудования, подлежащие учету, поступает на преобразователь аналог - код.Полученный результат поступает в вычислительную машину 2.
Недостатком известного устройства является большое время работы вычислительной машины на прием информации от датчиков, так как информация передается в вычислительную машину и тогда, когда ни один из датчиков не изменил своего состояния.
Целью изобретения является повышение надежности устройства, а также сокращение времени, расходуемого вычислительной машиной на приеме информации от групп датчиков путем передачи информации лишь в том случае, когда произошло изменение состояния хотя бы одного из датчиков в любой из групп контролируемых параметров.
Поставленная цель достигается тем что в устройство для контроля состояния оборудования, содержащее первый источник напряжения, первый блок контактных датчиков, выход которого соединен с первым входом аналогового сумматора, первый коммутатор, преобразователь аналог - код и вычислительную машину, введены второй источник напряжения, блок ввода информации, переключатели, второй коммутатор, делитель напряжения, второй блок контактных датчиков, триггер управления и блок контроля контактных датчиков, первый вход которого соединен с первым выходом первого коммутатора , первый вход которого подключен к выходу блока контроля контактных датчиков, второй вход которого соединен с выходом аналогового сумматора, выходы первого источника напряжения подключены ко второму 1ВХОДУ аналогового сумматора и к третьему входу блока контроля контактных датчиков, выход второго блока контактных датчиков соединен со входом делителя напряжения , группа выходов которого
подключена к группе входов второго коммутатора, первый выход которого соединен с первым входом триггера управления, второй вход которого подключен к выходу делителя напряжения, выход триггера управления соединен с первым входом коммутатора, второй выход которого подключен ко второму входу первого коммутатора, второй выход которого соединен со вторым входом второго коммутатора, управляющий вход которого подключен к третьему выходу первого коммутатора, четвертый выход которого соединен со входами блоков коммутации объектов, выходы которых подключены к третьему входу первого коммутатора, четвертый и пятый входы котогого соединены с выходами второго источника напряжения,пятый и шестой выходы первого коммутатора подключен ко входам блока ввода информации,вых которого соединен спервым входом вычислительной машины, выход которой подключен к шестому входу первого коммутатора, седьмой выход которого соединен со вторым входом вычислительной машины, третий вход которой подключен к первому выходу преобразователя аналог - код, второй выход которого соединен с седьмым входом первого коммутатора, восьмой выход которого подключен ко входу преобразователя аналог - код.
Аналоговый сумматор выполнен в виде делителя из последовательно включенных одинаковых по величине сопротивлений, каждое которых шунтировано контактным датчиком состояния одной единицы оборудования, и выходного сопротивления, включенного последовательно с делителем.
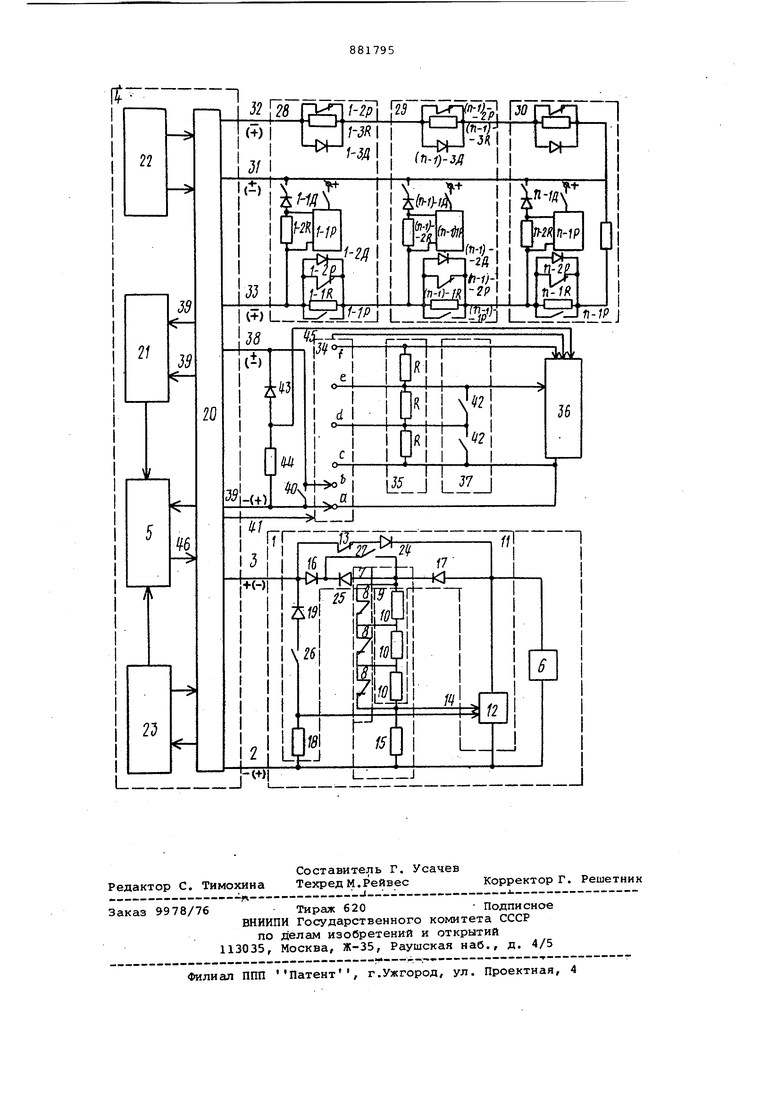
На чертеже приведена структурная схема предлагаемого устройства.
Система описывается на примере контроля работы одной группы сосредоточенных объектов контроля, одной группы включенных определенным обра зом объектов и группы распределенных объектов, состоящих из п объектов.
Устройство содерркит контролируемый пункт 1, первую линию связи 2, вторую линию связи 3, пункт 4 центролизованного контроля, вычислительную машину 5, первый источник 6 напряжения, первый блок 7 контактных датчиков, первые контактные датчики 8, аналоговый сумматор 9, резисторы 10, блок 11 контроля.контактных датчиков, триггеры 12, размыкающий контакт 13 триггера 12, входы 14 триггера 12, резистор 15, диоды 16 и 17, резистор 18, диод 19, коммутатор 20, блок 21 ввода информации , второй источник 22 напряжения, преобразователь 23 аналог - код, диоды 24, 25 замыкающие контакты 26, 27 триггера 12, блоки 28-30 коммутации объектов, третью четвертую и
пятую линии связи 31 - 33,второй коммутатор 34, делитель 35, триггер управления 36, второй блок 37 контактных датчиков, шестую и седьмую линию связи 38, 39, замыкающий контакт 40 триггера управления 36, вход управления 41 второго коммутатора 34 вторые контактные датчики 42, диод 43, резистор 44, выход 45 второго коммутатора 34, выход 46 вычислительной машины 5.
Устройство при контроле определенным образом включаемых объектов, работает следующим образом.
В исходном состоянии (ждущем режиме работы, при котором не происходит переключения первых контактных датчиков 8 состояния оборудования) первый коммутатор 20 находится в первом положении, при котором выход контролируемого пункта 1 соединен с первой и второй линией связи 2, 3 и через первый коммутатор 20 - со входом блока 21 ввода информации на пункте 4 централизованного контроля рассредоточенных контролируемых пунктов 1. Триггер 12 контроля переключения контактных датчиков В находится в первом состоянии, при котором его размыкающий контакт 13 замкнут, шунтируя диоды 17 и 16. Напряжение первого источника 6 напряжения приложено к резисторам 10 делителя и резистору 15 аналогового сумматора 9, а также через замкнутый контакт - к первой и второ линии связи 2, 3, Блок 21 ввода информации контролирует наличие напряжения в линиях связи 2 , 3 и срабатывает при исчезновении в ней напряжения.
При изменении состояния какой-либо единицы оборудования (одной или нескольких) замыкается (размлкается) один или несколько контактных датчиков 8 состояния оборудования, шунтируя (рааиунтируя) соответствующее сопротивление резистора 10 делителя, в результате чего изменяется его общее сопротивление.. Выходное напряжение аналогового сумматора 9 изменяется скачком. Импульс напряжения на резисторе 15 - выходной сигнал ансшогового сумматора 9 - поступает на первый импульсный вход 14 триггера 12 блока 11 контроля контактных датчиков 8 и переводит его во второе состояние. При переходе триггера 12 во второе состояние разуыкается его выходной контакт 13, шунтирующий диоды 16 и 17. Напряжение в линиях связи 2,3 благодаря диоду 16, включенному вхггречно первому источнику напряжения 6, исчезает и блок 21 ввода информации вырабатывает сигнал включения вычислительной машины 5. По этому сигналу вычислительная машина 5 переводит первый коммутатор 20 во второе положение.
в котором он подсоединяет к линиям связи 2, 3 преобразователь 23 аналогкод. Полярность в линиях связи 2,3 изменяется первым коммутатором 20 с прямой на обратную. Преобразователь 23 ансшог - код определяет и вводит в вычислительную машину 5 общее сопротивление НоЛщ в следующей цепи: провод первой линии связи 2 резистор 18 - диод 19 (включенный в прямом направлении) привод второй линии связи 3, которое равно
+ R
R
АС
la
где Rjit - сопротивление линий связи; Rtg - сопротивление резистора 18
По величин-е сопротивления Roum вычислительная машина 5, рассчитывает (по формуле Rflc Ro64.( - R ) и запоминает для дальнейших расчетов сопротивления Rлc .
Затем вычислительная машина 5 переводит первый коммутатор 20 в третье положение, при котором полярност в линиях связи 2, 3 изменяется с обратной на прямую.Преобразователь 23 аналог - код определяет общее сопротивление Roduji в следующей цепи: провод второй линии связи 3 - диод 16 , включенный в прямом направлении аналоговый сумматор 9-провод первой линии связи 2. Общее сопротивление , измеренное преобразователем 23 аналог - код равно
Rcp6m2-
+ mR + R
Rn
IS
где RI...-Rn
сопротивление одного резистора 10 делителя m - количество работающих единиц оборудования и, соответственно, число незашунтированных резисторов 10;
R, - известный резистор 15.
Величина сопротивления делителя рассчитывается с учетом измеренной в предыдущей операции величины сопротивления Rj,(, линии связи 2, 3, что позволяет исключить погрешность, вносимую двухпроводной линией связи 2,3 из-за изменения ее сопротивления во времени в результате влияния внешних факторов.
Сопротивление делителя равно
Ro6rti- Кяс - Ri5
По ведичине сопротивления делителя вычислительная машина 5 определяет количество работающих аппаратов по формуле о о о
Rotiui - Клс - K|S
m ц
Новое суммарное количество работающих единиц оборудования запоминается и выводится на индикаторы (на чертеже не показаны).
Затем вычислительная машина 5 переводит первый коммутатор 20 в четвертое положение, при котором второй источник напряжения 22 соединяет ся линиями связи 2, 3с контролируемым пунктом 1. Полярность в линиях связи 2, 3 при этом режиме работы переключается первым коммутатором 20 на обратную. При этом начинает проте кать ток по следующей цепи: плюс второго источниканапряжения 22 провод первой линии связи 2 - резистор 18 - диод 19 - привод второй линии связи 3 - минус второго источника напряжения 22, Импульс падения напряжения на резисторе 18, достаточ ный для переключения триггера 12, поступает на второй импульсный вход 14 триггера 12 блока 11 контроля кон тактных датчиков и переводит его в исходное состояние, В исходном состоянии триггер 12 замыкает свой выходной контакт 13, подключает второй источник напряжения 22 к линиям связи 2, 3. Вычислительная машина 5, согласно алгоритму вслед за посьолкой в линии связи 2, 3 сигнала на переключение триггера 12 переключает первый коммутатор 20 в исходное первое состояние. Первый коммутатор 20 подключает при этом- к пиниям связи 2, 3 блок 21 ввода информации , который контролирует в ней 1иличие напряжения от второго источника 22 напряжения. Наличие напрях ения в линиях связи 2, 3 соответствует ждущему режиму вычислительной машины 5 . При исчезновении напряжения вслед ствии обрыва или короткого замыкания в линиях связи 2, 3 вычислительная машина 5 определяет ее сопротивление, переключая первый коммутатор 20 во второе положение, подключая к линиям связи 2, 3 преобразователь 23 аналог - код. Если значение сопротив тения, полученное при этом измерении эавно бесконечности или выходит за допустимые пределы, вычислительная машина 5 выводит на индикаторы (на чертеже не показаны) информацию о повреждении линий связи 2, 3. Нормальное состояние -устройства для контроля сосредоточенных объектов характеризуется тем, что через первый коммутатор 20 шестая линия связи 38 соединена с линией связи 39 и далее с блоком 21 ввода информации. Полярность линии связи 38 обрат ная (на чертеже указана в скобках). Триггер 36 управления находится не во взведенном состоянии, и его замыкающий контакт 40, шунтирующий линию связи 38, находится в разомкну том состоянии. В случае, когда происходит переключение оборудования, включается или отключается аппарат, изменяется ток в цепи делителя 35, и, как следствие, изменяется падение напряжения между точками С - f . Триггер 36 управления настроен таким образом, ЧТОон срабатывает при изменении напряжения между точками С - f за счет шунтирования резисторов делителя 35. Замыкающий контакт 40 триггера 36 управления замыкается на время Т и в результате срабатывает блок 21 ввода информации по линии связи 39. После зтого блок 21 ввода информации переводит устройство в режим опроса состояний аппаратов . Этот блок по линии связи 41 переводит второй коммутатор 34 в такое состояние, что он соединяет линию связи 38 через первый коммутатор 20 с преобразователем аналог - код, по линии связи 41 запускает второй коммутатор 34,а он блокируется по линии 45 триггером 36 управления, который размыкает замыкающий контакт 40.Вротой KOiiMyTaTOp 34 своими ламелями по командам вычислительной . машины 5 по линии связи 41 последовательно подключает выходы резисторов R делителя 35,шунтированные вторыми контактами датчиками 42, к линии связи 38. Когда преобразователь 23 аналог - код определяет величину сопротивления, равную или близкую по величине сопротивления резистора R,TO это соответствует отключенному состоянию аппарата,а когда величина сопротивления близка к нулю, это соответствует включенному состоянию аппарата. Одновременно с распознанием состояния оборудования вычислительная машина 5 подсчитывает количество переключений коммутатора. Когда количество переключений коммутатора равно п -i- 2 ( где п - количество контролируемых аппаратов), преобразователь 23 аналог - код должен определить сопротивление, равное или близкое по величине сопротивле-нию резистора R делителя 35, что соответствует крайнему положению второго коммутатора 34 . (точка f). Этим осуществляется алгоритмическая проверка работоспособности. Бывают случаи, когда необходимо произвести заново опрос состояния оборудования при помощи второго коммутатора 34. Контроль линии связи 38 осуществляется с помощью перевода первого коммутатора 20 в такое положение, когда линия связи 38 подключена через первый, коммутатор 20 к преобразователю 23 аналог код. При этом полярность напряжения в линии связи 38 обратная (на. чертеже указана в скобках). При этой полярности ток течет через диод 43, резистор 44, линию связи 38, и преобразователь 23 аналог - код определяет величину сопротивления, равную или близкую величине сопротивления резистора 44. При этом величина сопротивления выбирается таким образом, что падение напряжения на нем в момент подключения линии связи 38 к преобразователю 23 аналог - код не вызывает срабатывания триггера управления 36 управления по линии связи
45. Когда величина сопротивления становится намного больше величины сопротивления резистора 44 или равна бесконечности, то это свидетельствуе о неисправности линии связи, В протином случае линия связи исправна.
Контроль работоспособности триггера 36 управления осуществляется с помощью перевода первого коммутатора 20 в такое положение, когда линия связи 38 подключена через первый
коммутатор 20 и линию связи 38 ко второму источнику напряжения 22. При этом полярность напряжения в линии связи 38 обратная (на чертеже указана в скобках). При такой полярности ток течет через диод 43 и резистор 44, а величина падения напряжения на этом резисторе достаточна, чтобы сработал триггер 36 управления На время, равное Т, замыкающий контакт 40 триггера 36 управления шунти рует линию связи 38. После подачи напряжения обратной полярности в линию связи 38 вычислительная машина переводит по линии 46 первый коммутатор 20 в нормальное состояние,т.е. соединяет линию связи 38 через первый коммутатор 20 и линию связи 39 с преобразователем 23 аналог - код. Когда срабатывает триггер 36 управления и замыкается его контакт 40, то блок ввода информации фиксирует это состояние. Если он не воспринимает этого сигнала, то это свидетельствует о неисправности триггера 36 управления или линии связи 38, так как исправность линии связи 38 определена предшествующей операцией.
Устройство при контроле состояния распределенных объектов работает следующим образом.
Возможно нормальное и аварийное функционирование устройства.
В ждущем режиме линии связи 31-33 соединены через первый коммутатор 20 с выходом блока 21 ввода информации. Полярность в линиях связи 31-33 прямая (на чертеже указана без скобок) . В случае появления аварийного сигнала на одном из объектов контроля размыкается размыкающий контакт реле п-2Р и в линиях связи 31-32
появляетсясопротивление больше R. Блок 21 ввода информации фиксирует это состояние и переводит устройство с помощью первого коммутатора 20 в режим определения величины сопротивления, соединив линии связи 31-33 через первый коммутатор 20 с преобразователем 23 аналог - код. Полярность в линиях связи 31- 33 прямая (на чертеже указана без скобок). Преобразователь 23 аналог - код опре деляет величину сопротивления в линиях связи 31-33 и по величине этого сопротивления определяется ава- . рийный сигнал, возникающий в п-ом объекте контроля.
Затем устройство переводится в режим сброса аварийного сигнала, при этом линии связи 31-33 соединются через первый коммутатор 20 со вторым источником 22 напряжения.
Напряжение второго источника 22 напряжения прилагается по следующей цепочке: n-2R, п-1 D, замыкающий контакт реле п -2Р на входе триггере п - IP. Триггер возводится и своим замыкающим контактом шунтирет резистор п - 1R и опять в линиях связи 31-33 величина сопротивления становится равной R. Затем устройство опять переходит в ждущий режим
Аварийноесостояние линии связи имеет следующие режимы.
При обрыве линии связи 31 в ждущем режиме первый коммутатор 20 соединяет линии связи 32-33 с входом блока 21 ввода информации, при этом полярность в линиях связи следующая в линии 33 - минус, в линии 32 плюс.
При обрыве линии связи 31 в аварийном режиме определения сопротивления первый коммутатор 20 соединяе линии связи 32 - 33 с входом преобразователя 23 аналог - код; полярность в линии связи 33 - минус, в линии связи 32 - плюс. По величине сопротивления определяется аварийное состояние п-го объекта.
При обрыве линии связи 32 в аварийном режиме определения сопротивления первый коммутатор 20 соединяе линии связи 31 - 32 с входом преобразователя 23 аналог - код. Полярность в линии связи 31 - плюс, в линии связи 32 - минус. Величина сопртивления линии связи, а, следоватепно, и аварийное состояние п-го объекта определяется преобразователем 23 аналог - код циклически.
При обрыве линии связи 33 в аварийном режиме определения сопротивления первый коммутатор 20 .соединяе линии связи 31 - 32 с входом преобразователя 23 аналог - код. Полярность в линии связи 31 - плюс, в линии связи 32 - минус. Величина сопротивления линий связи 31 - 32, а, спедовательно, и аварийное состояние п-го объекта определяется циклически.
Таким образом, устройство при контроле состояния распределенных объектов позволяет осуществить ждущий режим работы и повысить нащежность контроля состояния объектов за счет схемного решения и трехпроводной линии связи.
Устройство обеспечивает ввод в вычислительную машину полезной информации - после изменения состояния по крайней мере одного из объектов контроля в группе, что сокращает время обработки этой информации, позволяет существенно уменьшить объем оперативной памяти, т.е. повышает эффективность использования вычислительной машины. Кроме того, в данном устройстве устранена погрешность при измерения которая вносится линией связи. Одновременно предлагаемое устрой ство позволяет контролировать групп сосредоточенных, распределенных и определенным образом включаемых и OTKnro4aeNttJX объектов контроля. Кроме того в системе, позволяюще контролировать состояние объектов контроля по величине сопротивления устройств контроля, устранена погрешность при измерениях, которая вносится линией связи. Формула изобретения Устройство для контроля состояни оборудования , содержащее первый источник напряжения, первый блок контактных датчиков, выход которого со динен с первым входом аналогового сумматора, первый коммутатор, преобразователь аналог - код и вычисли тельную машину, отличающее с я тем, что, с целью повышения надежности и быстродействия устройства, в него введены второй источник напряжения,блок ввода информации, переключатели, второй коммутатор, делитель напряжения, второй бл контактных датчиков, триггер управления и блок контроля контактных датчиков, первый вход которого сое динен с первым выходом первого коммутатора, первый вход которого подключен к выходу блока контроля контактных датчиков, второй вход которого соединен с выходом аналогового сумматора, выходы первого источника напряжения подключены ко второму входу анёшогового сумматора и к тре тьему входу блока контроля контактных датчиков, выход второго блока контактных датчиков соединен со входом делителя напряжения, группа выходов которого подключена к группе входов второго коммутатора, первый выход которого соединен с первым входом триггера управления, второй вход которого подключен к выходу делителя напряжения, выход триггера управления соединен с первым входом второго коммутатора, второй выход которого подключен ко второму входу первого коммутатора, второй выход которого соединен со вторым входом второго коммутатора, управляющий вход которого подключен к третьему выходу первого коммутатора, четвертый выход которого соединен со входами переключателей, выходы которых подключены к третьму входу первого коммутатора, четвертый и пятый входы которого соединены с выходами второго источника напряжения, пятый и шестой выходы первого коммутатора подключены ко входам блока ввода информации, выход которого соединен с первым входом вычислительной машины, выход которой подключен к шестому входу первого коммутатора, седьмой выход которого соединен со вторым входом вычислительной машины, третий вход которой подключен к пер- вому выходу преобразователя аналог код, второй выход которого соединен с седьмым входом первого коммутатора, восьмой выход которого подключен ко входу преобразователя аналог - код. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР 424199, кл. G 07 С 3/10, 1972. 2.Авторское свидетельство СССР № 402039 кл. G 07 С 3/00, 1971 (прототип). , чН-(+)
kJ LIU
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля сопротивления изоляции сети постоянного тока | 1990 |
|
SU1774284A1 |
| Программный генератор | 1983 |
|
SU1190484A1 |
| Устройство для контроля электрических параметров полупроводниковых диодов | 1983 |
|
SU1138768A1 |
| Программный генератор | 1980 |
|
SU917319A1 |
| Инфранизкочастотный программный генератор | 1980 |
|
SU919055A1 |
| Устройство для сопряжения двух ЭВМ | 1990 |
|
SU1798793A1 |
| Программный генератор периодических сигналов и постоянных напряжений а.и.кантера | 1978 |
|
SU790154A1 |
| Программный генератор | 1979 |
|
SU860291A1 |
| Цифровой измеритель температуры | 1985 |
|
SU1303849A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ИЗОЛЯЦИИ СЕТЕЙ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2026561C1 |