(54) ДАТЧИК СИГНАЛА МАГНИТНОГО РЕЗОНАНСА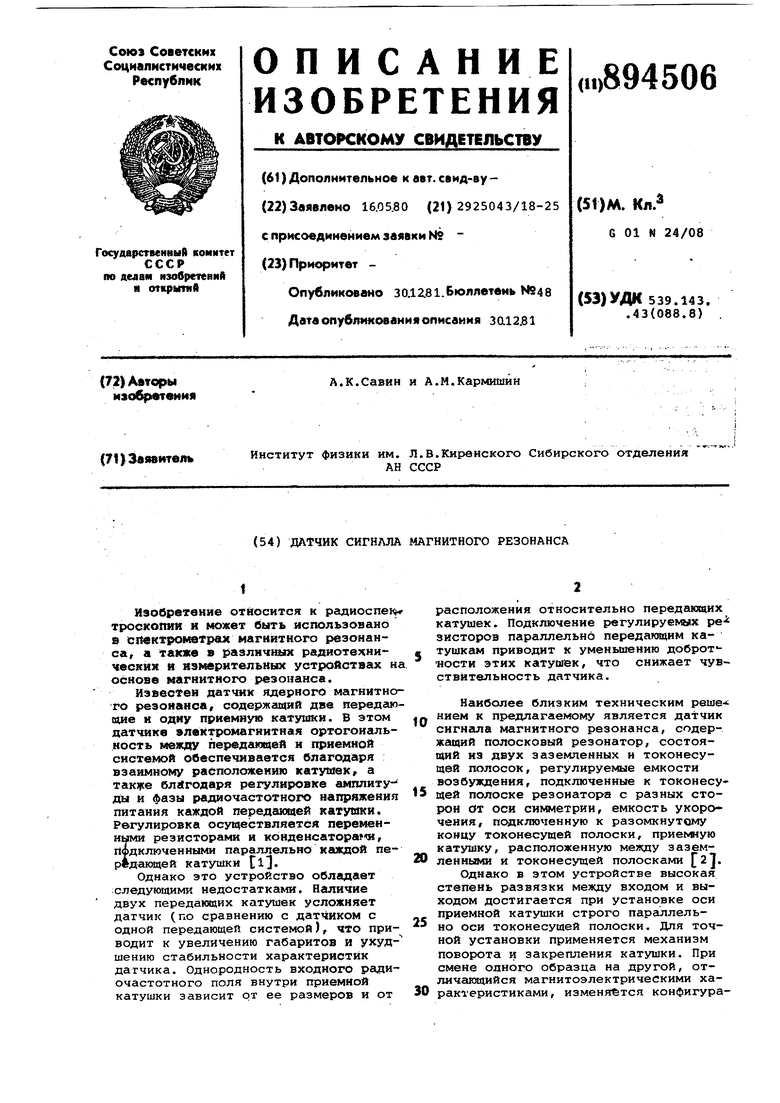
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик сигнала магнитного резонанса | 1978 |
|
SU721735A1 |
| Датчик сигнала магнитного резонанса | 1980 |
|
SU928210A1 |
| ДВУХДИАПАЗОННАЯ ПОЛОСКОВАЯ УКВ АНТЕННА | 2024 |
|
RU2828603C1 |
| РЧ КАТУШКА ДЛЯ ИСПОЛЬЗОВАНИЯ В МР СИСТЕМЕ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2007 |
|
RU2451946C2 |
| Датчик сигнала ядерного квадрупольного резонанса | 1987 |
|
SU1408323A1 |
| Устройство для измерения характеристик магнитных пленок | 1980 |
|
SU883821A1 |
| ДАТЧИК МАГНИТНОГО ПОЛЯ | 1992 |
|
RU2091808C1 |
| МАЛОГАБАРИТНЫЙ РЕЗОНАТОР ДЛЯ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЭНЕРГИИ И ЕГО ИНТЕГРАЦИИ С АНТЕННОЙ ДЛЯ ПЕРЕДАЧИ ДАННЫХ | 2012 |
|
RU2519389C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ КОНТУРА ПАЦИЕНТА ПРИ УВЧ-ТЕРАПИИ | 1992 |
|
RU2012379C1 |
| ПОЛОСКОВЫЙ ФАЗОВРАЩАТЕЛЬ | 1998 |
|
RU2141151C1 |
I
Изобретение отйосится к ргшиоспе тросхотт и может быть использовано в citeKXpOMefpax магнитного резонанса, а Факте в различных радиотехнических и из)« рительных устройствах на основе магнитного резонанса.
Известен датчик ядерного магнитного резонанса, содержгиций две перюдаюoute и одну приемную катушки. В этом датчике электромагнитная ортогональность между передающей н приемной системой обеспечивается благодаря взаимному расположению катушек, а такчсе благодаря регулировке амплиту Ды и фазы радиочастотного напряжения питания каждой передающей катушки. Регулировка осуществляется переменными резисторами и конденсатораго, пшдключеннымн параллельно каждой передающей катушки tilОднако это устройство обладает следующими недостатками. Наличие двух передающих катушек усложняет датчик (по сравнению с датчиком с одной передающей системой), что приводит к увеличению габаритов и ухудшению стабильности характеристик датчика. Однородность входного радиочастотного поля внутри приемной катушки зависит от ее размеров и от
расположения относительно передающнх катушек. Подключение регулируемых зисторов параллельно передакицнм катушкам приводит к уменьшению добротности зтих катушек, что сннжает чувствительность датчика.
Наиболее близким техническим реше-t нием к предлагаемому является датчик
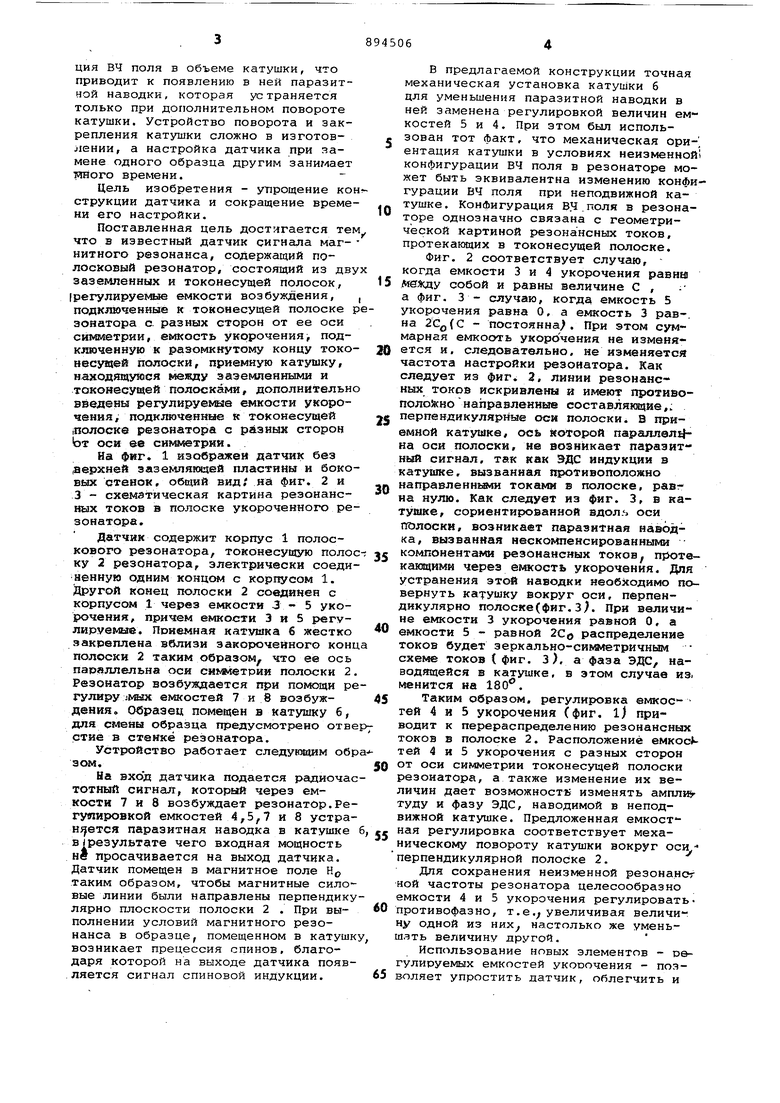
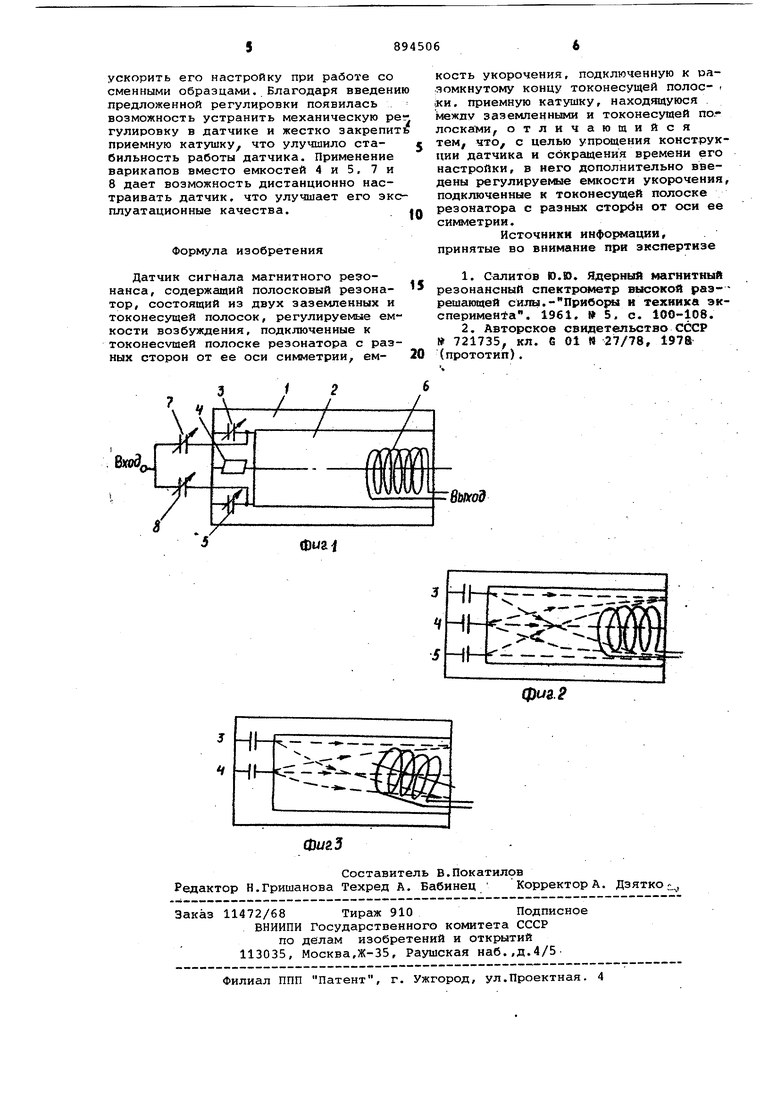
10 сигнала магнитного резонанса, содержащий полосковый резонатор, состоящий из двух заземленных и токонесущей полосок, регулируекие емкости возбуждения, подключенные к токонесущей полоске резонатора с разных сторон ОТ оси cHNweTpHH, емкость укорочения, подключенную к разомкнутому концу токонесущей полоски, приемную катушку, расположенную между заземЯ) ленными и токонесущей полосками f 2j|. Однако в этом устройстве высокая степень развязки между входом и выходом достигается при установке оси приемной катушки строго пара}глель25но оси токонесущей полоски. Для точной установки применяется механнзм поворота и закрепления катушки. При смене одного образца на другой, отличающийся магнитоэлектрическими характеристиками, изменяется конфигурация ВЧ поля в объеме катушки, что приводит к появлению в ней паразитной наводки, которая устраняется только при дополнительном повороте катушки. Устройство поворота и закрепления катушки сложно в изготовЛенин, а настройка датчика при замене одного образца другим занимает иного времени. Цель изобретения - упрощение кон струкции датчика и сокращение времени его настройки. Поставленная цель достигается тем что в известный датчик сигнала магнитного резонанса, содержащий полосковый резонатор, состоящий из дву заземленных и токонесущей полосок, (регулируегвле емкости возбуждения, подключенные к токонесущей полоске р зонатора с. разных сторон от ее оси симметрии, емкость укорочения подключенную к разомкнутому концу токо несущей полоски, приемную KaTjmiKy, находящуюся между заземленными и токонесущей полосками, дополнительн введены регулируегФав емкости укорочения , подключенные к токонесущей щолоске резонатора с разных сторон Ьт оси ее си ®«етрнй. На фиг. 1 изображеи датчик без верхней заземпяквдей пластины и боко вых стенок, общий вид; на фиг. 2 и 3 - схематическая картина резонансных токов в полоске укороченного ре зонатора, Датчик содержит корпус 1 полоскового резонатора, токонвсу1яую поло ку 2 резонатора, электрически соеди аенную одним концом с корпз сом 1. Другой конец полоски 2 соединен с корпусом 1 через емкости 3 - 5 укорочения, причем емкости 3 и 5 регулируемые. Приемная катушка б жестко закреплена вОлизи закорочейного кон полоски 2 таким образом что ее ось параллельна оси сн 4метрии полоски 2 Резонатор возбуждается при помощи р гу лиру jivaax емкостей 7 и 8 возбуждения. Образец помещен в катушку б, для смены образца предусмотрено отв стие в стеикё резонатора. Устройство работает следующим об зом. На вход датчика подается ргщиоча тотный сигнал, который через емкости 7 и 8 возбуждает резонатор.Ре гулировкой емкостей 4,5,7 и 8 устра HijeTCH паразитная наводка в катушке в результате чего входная мощность н1 просачивается на выход датчика. Датчик помещен в магнитное поле Нр таким образом, чтобы магнитные сило вые линии были направлены перпендик лярно плоскости полоски 2 . При выполнении условий магнитного резонанса в образце, помещенном в катуш возникает прецессия спинов, благодаря которой на выходе датчика появ .ляется сигнал спиновой индукции. В предлагаемой конструкции точная механическая установка катушки б для уменьшения паразитной наводки в ней заменена регулировкой величин емкостей 5 и 4. При этом был использован тот факт, что механическая ориентация катушки в условиях неизменной конфигурации ВЧ поля в резонаторе может быть эквивалентна изменению конфигурации ВЧ поля при неподвижной катушке. Конфигурация В. в резонаторе однозначно связана с геометрической картиной резонансных токов, протекающих в токонесущей полоске. Фиг. 2 соответствует случаю, когда емкости 3 и 4 укорочения равна между собой и равны величине С , а фиг. 3 - случаю, когда емкость 5 укорочения равна О, а емкость 3 рав-. на 2Сд(С - постоянна. При этом сум марная емкооть укорочения не изменяется и, следовательно, не изменяетсяг частота настройки резонатора. Как следует из фиг. 2, линии резонансных токов искривлены и имеют противополо кво напревлениые составляющие,; перпендикулярные оси полоски. В приемной катушке, ось йоторой параллел }на оси полоски, ив возникает паразитный сигнал, так как ЭДС индукции в катушке, вызванная противоположно направленна токами в полоске, равг на нулю. Как следует из фиг. 3, в катушке, сориентироваиной вдоль оси полоски, возникает паразитная наводка, вызванная нескомпенсированными компонентами резонансных токов протекаквдими через емкость укорочения. Для устранения этой наводки необходимо повернуть катушку вокруг оси, перпендикулярно полоске(фиг.З). При величине емкости 3 укорочения равной О, а емкости 5 - равной 2Со распределение токов будет зеркально-сиьвиетричным схеме токов { фиг. З), а фаза ЭДС, наводящейся в катушке, в этом случае И3| менится на . Таким образом, регулировка емкое- гей 4 и 5 укорочения (фиг. 1) приводит к перераспределению резонансных токов в полоске 2. Расположение eMKOcJ тей 4 и 5 укорочения с разных сторон от оси симметрии токонесущей полоски резонатора, а также изменение нх величин дает возможность изменять амплиу туду и фазу ЭДС, наводимой в неподвижной катушке. Предложенная емкостная регулировка соответствует механическому повороту катушки вокруг оси перпендикулярной полоске 2. Для сохранения неизменной резонаног ной частоты резонатора целесообразно емкости 4 и 5 укорочения регулировать противофазно, т.е. увеличивая величиг ну одной из них настолько же уменьшать величину другой. Использование новых элементов - регулируемых емкостей укооочения - позволяет упростить датчик, облегчить и
ускорить его настройку при работе со сменными образцами. Благодаря введению предложенной регулировки появилась возможность устранить механическую регулировку в датчике и жестко закрепить приемную катушку, что улучшило стабильность работы датчика. Применение варикапов вместо емкостей 4 и 5. 7 и 8 дает возможность дистанционно настраивать датчик, что улучшает его эксплуатационные качества.
Формула изобретения
Датчик сигнала магнитного резонанса, содержащий полосковый резонатор, состоящий из двух заземленных и токонесущей полосок, регулируемые емкости возбуждения, подключенные к токонесущей полоске резонатора с разных сторон от ее оси симметрии, емкость укорочения, подключенную к разомкнутому концу токонесущей полос- f «и. приемную катушку, находящуюся между заземленными и токонесущей по. лесками отличающийся тем, что, с целью упрощения конструкции датчика и сокращения времени его настройки, в него дополнительно введены регулируемые емкости укорочения, подключенные к токонесущей полоске резонатора с разных стордн от оси ее симметрии.
Источники инфО1 «ации, принятые во внимание при экспертизе
(прототип).
