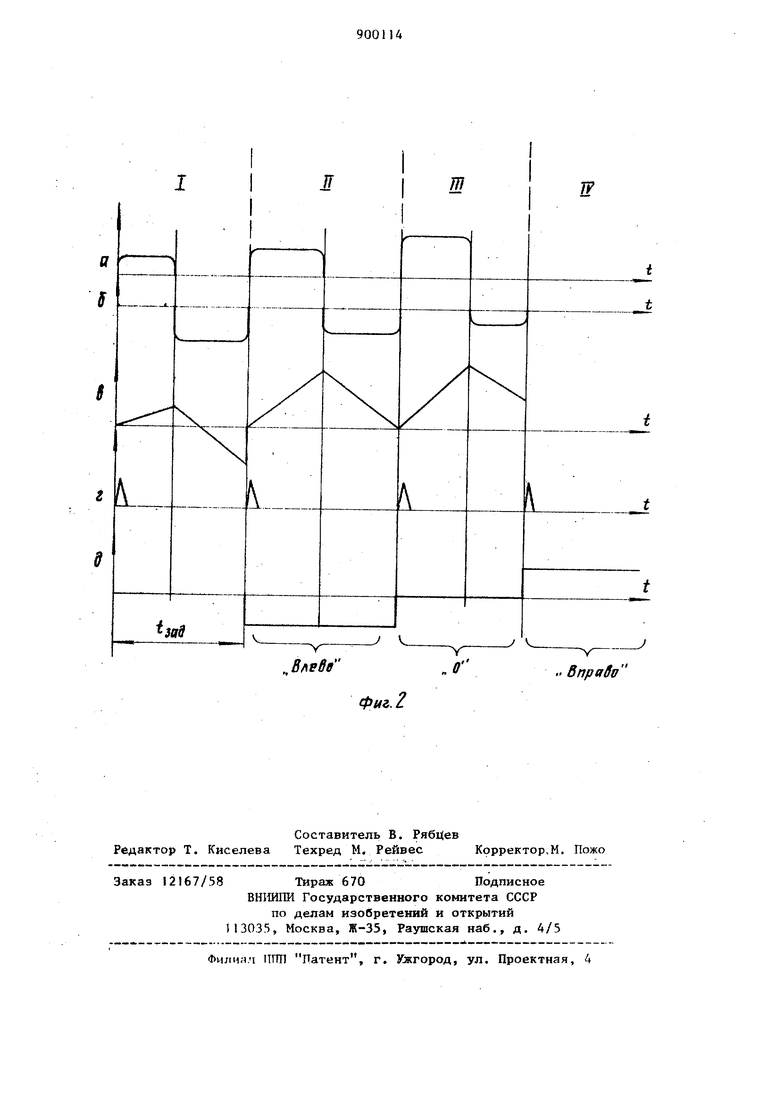
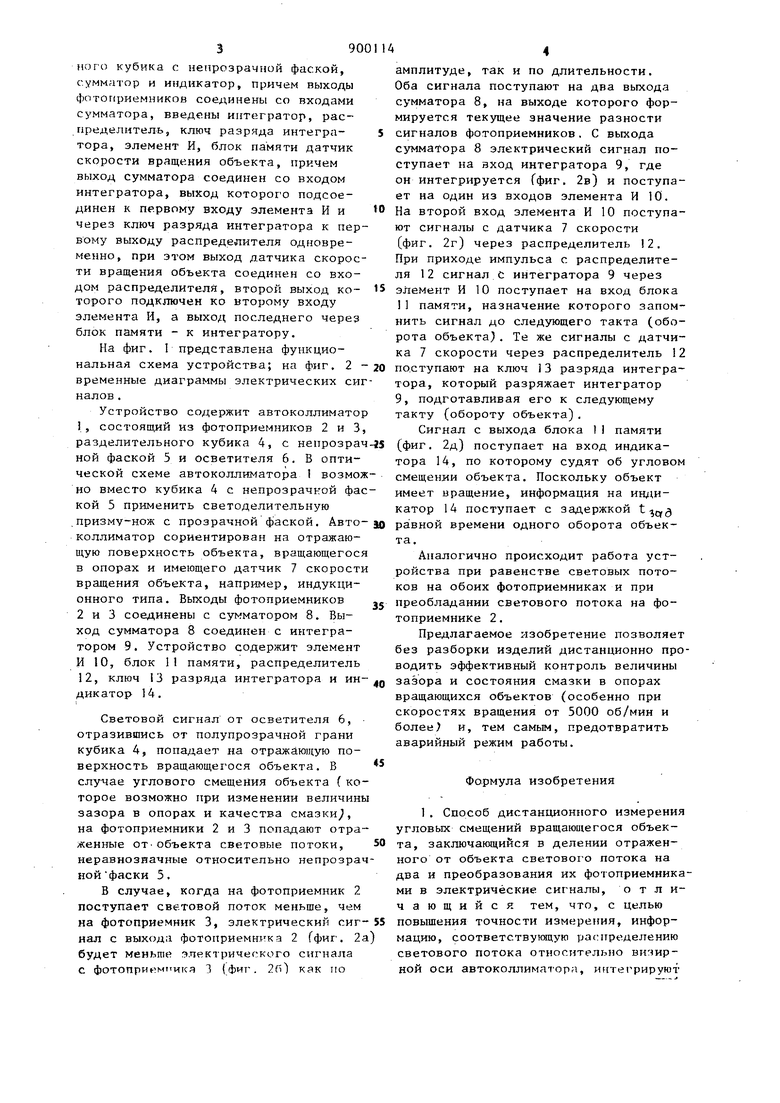
39 него кубика с непрозрачной фаской, сумматор и индикатор, причем выходы фотог риемников соединены со входами сумматора, введены интегратор, распределитель, ключ разряда интегратора, элемент И, блок памяти датчик скорости вращения объекта, причем выход сумматора соединен со входом интегратора, выход которого подсоединен к первому входу элемента И и через ключ разряда интегратора к пер вому выходу распределителя одновременно, при этом выход датчика скорос ти вращения объекта соединен со входом распределителя, второй выход которого подключен ко второму входу элемента И, а выход последнего через блок памяти - к интегратору. На фиг. I представлена функциональная схема устройства; на фиг. 2 временные диаграммы электрических сигналов . Устройство содержит автоколлиматор i, состоящий из фотоприемников 2 и 3, разделительного кубика 4, с непрозрач-1 5 ной фаской 5 и осветителя 6. В оптической схеме автоколлиматора 1 возможно вместо кубика 4 с непрозрачной фаской 5 применить светоделительную .призму-нож с прозрачной фаской. Авто-зд коллиматор сориентирован на отражающую поверхность объекта, вращающегося в опорах и имеющего датчик 7 скорости вращения объекта, например, индукционного типа. Выходы фотоприемников 2 и 3 соединены с сумматором 8. Выход сумматора 8 соединен с интегратором 9. Устройство содержит элемент И 10, блок 11 памяти, распределитель 12, ключ 13 разряда интегратора и индикатор 14. Световой сигнал от осветителя 6, отразившись от полупрозрачной грани кубика 4, попадает на отражающую поверхность вращающе1ося объекта. В случае углового смещения объекта ( которое возможно при изменении величины зазора в опорах и качества смазки, на фотоприемники 2 и 3 попадают отраженные ОТобъекта световые потоки, неравнозначные относительно непрозрач ной фаски 5. В случае, когда на фотоприемник 2 поступает световой поток меньше, чем на фотоприемник 3, электрический сигнал с выхода фотоприемника 2 (фиг. 2а будет меньшее электрического сигнала с фотопри м1ика 3 (фиг. 2П1 как по амплитуде, так и по длительности. Оба сигнала поступают на два выхода сумматора 8, на выходе которого формируется текущее значение разности сигналов фотоприемников. С выхода сумматора 8 электрический сигнал поступает на вход интегратора 9, где он интегрируется Гфиг. 2в) и поступает на один из входов элемента И 10. На второй вход элемента И 10 поступают сигналы с датчика 7 скорости (фиг. 2г) через распределитель 2. При приходе импульса с распределителя 12 сигнал С интегратора 9 через элемент И 10 поступает на вход блока 11 памяти, назначение которого запомнить сигнал до следующего такта (оборота объекта). Те же сигналы с датчика 7 скорости через распределитель 12 по.ступают на ключ 13 разряда интегратора, который разряжает интегратор 9, подготавливая его к следующему такту (обороту объекта). Сигнал с выхода блока 11 памяти (фиг. 2д) поступает на вход индикатора 14, по которому судят об угловом смещении объекта. Поскольку объект имеет вращение, информация на индикатор 14 поступает с задержкой времени одного оборота объекАналогично происходит работа устройства при равенстве световых потоков на обоих фотоприемниках и при преобладании светового потока на фотоприемнике 2. Предлагаемое изобретение позволяет без разборки изделий дистанционно проводить эффективный контроль величины зазора и состояния смазки в опорах вращающихся объектов (особенно при скоростях вращения от 5000 об/мин и более) и, тем самым, предотвратить аварийный режим работы. Формула изобретения 1. Способ дистанционного измерения угловых смещений вращаюи1егося объекта, заключающийся в делении отраженного от объекта световогО потока на два и преобразования их фотоприемниками в электрические сигналы, отличающийся тем, что, с целью повышения точности измерения, информадию, соответствующую распределению светового потока относительно виг иpной оси автоколлиматора, интегрируют
5
и запоминают в периоды времени, синхронизированные с вращением объекта.
2.Способ по п. I,.отличающий с я тем, что, с целью обеспечения максимального быстродействия период интегрирования .выбирают равным времени одного оборота объекта.
3.Устройство дистанционного измерения угловых смещений вращающегося объекта, содержащее автоколлиматор, состоящий из осветителя, двух фотоприемников и разделительного кубика
с непрозрачной фаской, сумматор и индикатор, причем выходы фотоприемников соединены со входами сумматора, отличающееся тем, что в него введены интегратор, распределитель, ключ разряда интегратора, элемент И, блок памяти, датчик скорости
144
вращения объектива, причем выход сумматора соединен со входом интегратора, выход которого подсоединен к.первому входу элемента И и через ключ разряда интегратора к первогчу выходу распределителя одновременно, при этом выход датчика скорости вращения объекта соединен со входом распределите ля, второй выход которого подключен ко второму входу элемента И, а выход последнего через блок памяти - к индикатору.
Источники информации, принятые во внимание при экспертизе
1.Якушенкова Ю. Г. Основы оптикоэлектронного приборостроения, М., 1977, с. 85-86.
2.Авторское свидетельство СССР № 287329, кл. G 05 D 1/00, 1970.
, BnpaSv
фиъ.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Скоростная камера ждущего типа | 1986 |
|
SU1385117A1 |
| Автоколлиматор | 1979 |
|
SU993013A1 |
| Фотоэлектрический автоколлиматор | 1972 |
|
SU462985A1 |
| Лазерный измеритель скорости объекта | 1991 |
|
SU1780016A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФОРМЫ И ПЛОЩАДИ СВЕТОКОНТРАСТНОГО ОБЪЕКТА | 1992 |
|
RU2100776C1 |
| АВТОКОЛЛИМАТОР\ | 1973 |
|
SU433454A1 |
| Устройство для автоматического измерения ширины рулонных материалов | 1982 |
|
SU1052843A1 |
| Оптоэлектронное устройство для измерения линейных размеров | 1980 |
|
SU938019A1 |
| Автоматизированный гониометр | 1982 |
|
SU1196685A1 |
| Фотоэлектрический преобразователь перемещений в код | 1976 |
|
SU642756A1 |