(5) СТАНОК-КАЧАЛКА


| название | год | авторы | номер документа |
|---|---|---|---|
| Станок-качалка | 1980 |
|
SU866274A1 |
| Станок-качалка | 1986 |
|
SU1344942A1 |
| Станок-качалка | 1989 |
|
SU1603055A1 |
| СТАНОК-КАЧАЛКА ДЛЯ ДОБЫЧИ НЕФТИ | 2022 |
|
RU2778764C1 |
| МОБИЛЬНЫЙ СТАНОК-КАЧАЛКА | 2011 |
|
RU2479751C1 |
| СТАНОК-КАЧАЛКА | 1997 |
|
RU2132489C1 |
| СТАНОК-КАЧАЛКА | 2010 |
|
RU2455526C1 |
| СТАНОК-КАЧАЛКА | 2010 |
|
RU2450161C2 |
| СТАНОК-КАЧАЛКА ДЛЯ ДОБЫЧИ НЕФТИ | 2022 |
|
RU2801627C1 |
| СТАНОК-КАЧАЛКА | 1997 |
|
RU2135832C1 |


I
Изобретение относится к приводам скважинных штанговых насосов, в частности к станкам-качалкам и может быть использовано при эксплуатации нефтяных скважин„
Известны станки-качалки, содержащие основание, опорную стойку, балансир, связанный с установленным на опорной стойке подшипником, электродвигатель, уравновешивающий элемент в виде противовесов, расположенных на шатунно-кривошипном механизме при роторном уравновешивании или непосредственно на балансире при балансирном уравновешивании, и тормозное устройство .
Цель изобретения - повышение эффективности работы станка-качалки путем облегчения и ускорения процессов изменения длины хода и числа качаний, а также снижения мощности электродвигателя о
Эта цель достигается тем, что электродвигатель выполнен в виде ли,нейного асинхронного двигателя с реверсивным возвратно-поступательно движущимся рабочим органом, расположенного на балансире, который снаб- . жен направляющими и установленными в них с возможностью перемещения, по меньшей мере,одним набором грузов, связанным с возвратно-поступательно движущимся рабочим органом двигателя.
10
На фиго 1 схематично представлено станок-качалка с роторным уравновешиванием и возвратно-поступательно движущимся статором линейного асинхронного двигателя; на фиг. 2 - ста15нок-качалка с роторным уравновешиванием + возвратно-поступательно дви- . жущимся ротором линейного асинхронного двигателя; на фиг„ 3 - станоккачалка с балансирным уравновешивани20ем и возвратно-поступательно движущимся ротором линейного асинхронного двигателя, с установленными по обе стороны ротора грузами; на фиг. k 3905
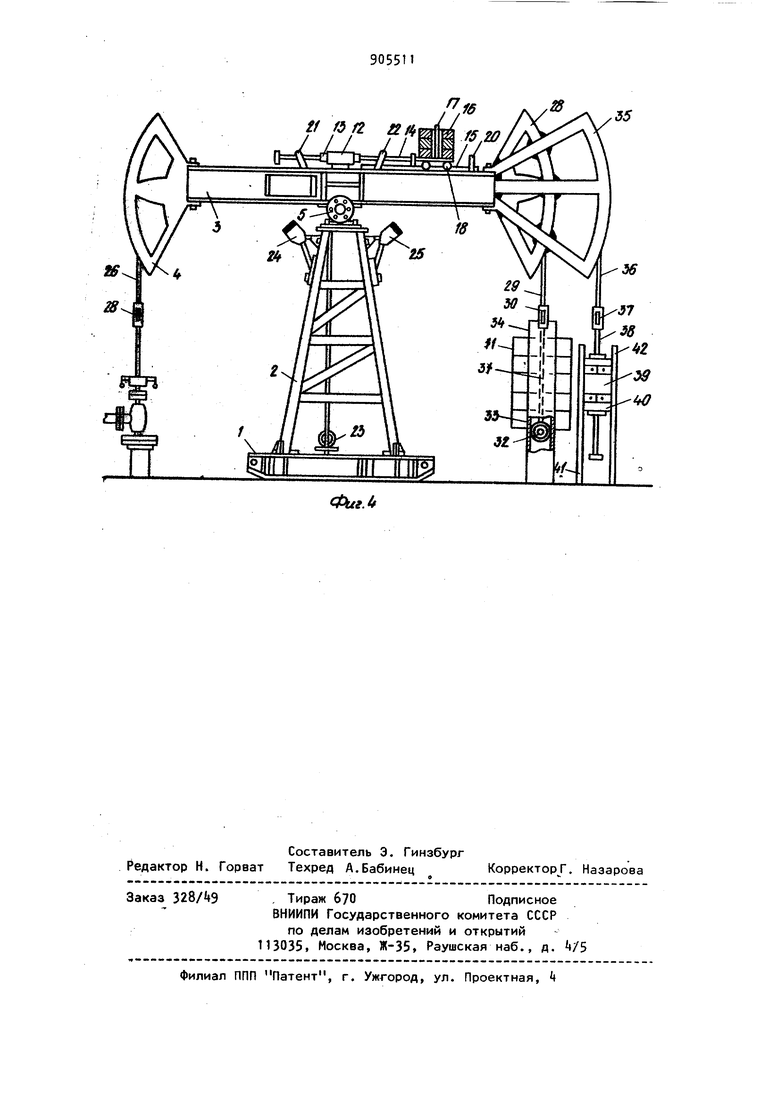
станок-качалка с балансирным уравновешиванием и возвратно-поступательно движущимся ротором линейного асинхронного двигателя, с установленными по одну сторону от ротора грузамио
Станок-качалка (на фиг. 1) состоит из установленных на раме основания Т опорной стойки 2, на которой расположен балансир 3 с шарнирно закрепленной к нему головкой связанный с установленным на опорной стойке 2 подшипником 5, а также опорной стойки 6 кривошипного вала 7 на котором расположены кривошипы 8, связанные с шатунами 9 и образующие кривошипно-шатунный механизм (не обозначен) , взаимодействующий посредством траверсы 10 с балансиром 3. На кривошипах 8 кривошипно-шатунного механизма установлены уравновешивающие элементы-противовесы 11 для уравновешивания всей системы станка-качалки во время его работы, а на балансире 3 - линейный асинхронный электродвигатель (ЛАД) 12 со статором 13 и ротором l4o
Балансир 3, в свою очередь, снабжен направляющими 15 и установленным в них с возможностью перемещения, по меньшей мере, одним набором грузов 16, расположенных на стойке 17, и связанным с возвратно-поступательно движущимся рабочим органом-статором 13 (фиг. 1) или ротором 1 (фиг. 2) электродвигателя 12. Корпус возвратно-поступательно движущегося рабочего органа (не показан) статора 13(фиг.1) или ротора И (фиго 2) установлен в направляющей 15 с помощью опор качения 18. На баланЬире установлены упорные стойки 19 и 20 и концевые отключатели 21 и 22, а на раме основания 1 - тормозное устройство 23, причем опорная стойка 2 балансира 3 снабжена амортизаторами-отключателями 2 и 25 хода балансира с вмонтированными 8 них концевыми включателями (не показаны).
Головка балансира 3 посредством канатной подвески 26 соединена с траверсой 27 полированного штока и колонной насосных штанг в скважине (не показаны).
На фиг. 1 ротор 1 электродвигателя 12 неподвижно закреплен в упорных стойках 19 и 20, а его статор 13 имеет возможность возвратно-поступательного перемещения по направляющим 15 балансира 3 с помощью опор качения 18 совместно с набором грузов 16,
На фиг, 2 статор 13 электродвигателя 12 неподвижно закреплен над местом установки балансира 3 на его опоной стойке 2, в то время как ротор 14 с прикрепленными к его концам стойками 17 с грузами 16 имеет возможность возвратно-поступательного перемещения вдоль балансира 3.
Станок-качалка, представленный на фиг. 3, содержит те же элементы 1-5 и 11-27 в той же самой азаимосвя,зи, что и станок-качалка на фиг. 1 и 2. Кроме того, упомянутый станоккачалка на фиг, 3 содержит вторую головку 28,расположенную на другом конце балансира 3, противоположном устью скважины (не показано), дополнительную канатную подвеску 29, связанную со второй головкой 28 балансира 3 траверсу 30 дополнительной канатной подвески 29, держатель 31 противовесов 11, а также ось 32, подшипник 33, и направляющую 3 держателя 31. Вторая головка 28 балансира 3, также как и его первая головка t, посредством дополнительной канатной подвески 29 соединена с траверсой 30 сочлененной с держателем 31 противовесов 11.
Противовесы 11 опираются на ось 32 держателя 31, укрепленную перпендикулярно вертикальному стержню держателя, на который одеты противовесы. На концах оси 32 установлены подшипники 33 для возможности возвратно-поступательного перемещения держателя 31 с противовесами 11 вверх и вниз по двум направляющим З таврового профиля при работе станкакачалки.
Станок-качалка (на фиг. } содержит элементы 1-5 и 11-З в той же самой взаимосвязи, что и станок-качалка на фиг. 3. В то же время станок-качалка на фиг. содержит дополнительно моторную головку 35 балансира 3, вторую дополнительную канатную подвеску 36, траверсу 37 второй дополнительной канатной подвески Зб, ротор 38 и статор 39 дополнительного линейного асинхронного двигателя 0, установленного в опорных стойках 1 и k2. Которная головка 35 параллельно совмещена с дополнительной головкой 28 таким образом, что последняя расположена внутри моторной головки 35, а щеки (не обозначены) этих головок жестко скреплены между собо Передняя плоскость головки 35 имеет прорезь (на фиг. k не показана) для прохода дополнительной канатной под вески 29 при опускании заднего конц балансира 3 со спаренными головками 28 и 35. Моторная головка 35 посредством второй дополнительной канатной подвески 36 соединена с траверсой 37, связанной с ротором 38 дополнител,ного ЛЛДа 40, статор 39 которого неподвижно укреплен в стой ках и k2. Набор грузов 16 может быть прикреплен и к одному из концов возвратно-поступательно движущегося ро тора И электродвигателя 12, в то время, как другой его конец остаетс свободным, причем в этом случае -соответственно изменяется количество противовесов, например, на правом плече балансира 3 (см. фиг. А). ЛАД 12, перемещающий набор грузов 16 по направляющим 15 балансира 3 станка-качалки, в случае необходимости , может быть установлен и не на балансире, а на каком-либо отдель ном основании, размещенном в стороне от станка-качалки. При этом связь перемещаемых по направляющим IS балансира 3 наборов грузов 16 непосредственно с двигателем 12 в каждом конкретном случае осуществляется известными конструктивными приемами. Станки-качалки работают следующим образом. После уравновешивания всей системы станка-качалки по фиг. посредством установки и закрепления противовесов 11 выключается тормозное уст ройство 23 и включается ЛАД 12. Статор 13 электродвигателя с установленными на стойке 17 его корпуса набором грузов 16 начинает перемещаться по направляющим 15 с помощью опор качения 1В справа налево по балансиру 3 станка-качалки вдоль неподвижно прикрепленного к упорным стойкам 19 и 20 ротора Т. Дойдя до левого концевого отключателя 21, корпус статора 13 нажимает на него и, повернув, отключает ЛАД 12. Таким образом, статор 13 11 2 с грузами 16 оказывается в крайнем левом поло хении на балансире 3. Под действием веса колонны шланг в скважине и веса статора 13 со стойкой 17 и набором грузов 1б, передний конец балансира 3 с головкой начинает опускаться, а задний конец его с противовесами 11 - подниматься. Дойдя до левого амортизатора-ограничителя 2 с вмонтированным в него концевым включателем, переднее плечо балансира 3 нажимает на подушку амортизатора-ограничителя и включает электродвигатель 12. При этом ста- . тор 13 с установленным на стойке 17 его корпуса набором грузов 1б начинает перемещаться по направляющим 15 по балансиру 3 в обратном направлении до упора в правый концевой отключатель 22; при нажиме статора 13 на отключатель 22 происходит отключение ЛАДа 12 и статор 13 со стойкой 17 и набором грузов 1б оказывается в крайнем правом положении на балансире 3. Под действием противовесов 11 и веса- статора 13 со стойкой 17 и набором грузов 1б задний конец балансира 3 начинает опускаться, а передний его конец с головкой k идут вверх, увлекая за собой колонну насосных штанг, плу:мжер скважиИного насоса и столб жидкости в скважине. Дойдя до правого амортизатора-ограничителя 25 с вмонтированным в него концевым включателем, заднее плечо балансира нажимает на подушку амортизатора-ограничителя и включает электродвигатель 12. Далее работа станка-качалки осуществляется в той же последовательности. Работа станков-качалок, изобраенных соответственно на фиг. 2 и 3, осуществляется аналогичным образом с той лишь разницей, что при не- одвижно закрепленном статоре 13 электродвигателя 12, возвратно-потупательное перемещение вдоль наравляющих 13 балансира 3 станкаачалки совершает его ротор Т совестно со стойками 17 и установленными на них наборами грузов 16; в том случаеПопеременное переключеие концевых отключателей 21 и 22 существляется указанными стойкаи 1 7 .
19
В вышеописанных вариантах станков-качалок по фиг. 1 и 2 при качании балансира 3 кривошипы 8 с противовесами 11 совершают возвратнокачательное движение по дуге, не превышающей 175.
Работа станка-качалки (по фиг.) осуществляется следующим образом.
Посредством противовесов 11 почти уравновешивается колонна штанг в скважине (вес противовесов немного меньше веса колонны штанг в жидкости скважины), а электродвигатель kQ, связанный с моторной головкой 35 выбирается таким, чтобы момент силы, создаваемый его силой тяги, полностью был равеи моменту силы, возникающему от действия веса поднимаемого в скважине столба жидкости при ходе колонны штанг вверх.
ftocfle этого выключается тормозное устройство 23 и включается ЛАД 12, расположенный на балансире 3 станкакачалки. Ротор I этого электродвигателя совместно со стойкой 17 и набором грузов 16 -начинает перемещаться в сторону передней головки . Дойдя до крайнего левого положения, стойка 17 е набором грузов 16 нажимает на правый концевой откпючатель 22 и выключает электродвигатель 12 на балансире 3. Под действием веса колонны шта«г в скважине передний конец балансира 3 с головкой 4 начинает опускаться, а задний конец балансира3 со спаренными головками 28 и 35 идет вверх, увлекая за собой соответственно противовесы 11 и ротор 38 отключенного электродвигателя «О, связанного с моторной головкой 35.
Дойдя до левого амортизатораограничителя 2 с вмонтированным в него концевым включателем, левое плечо балансира 3 нажимает на подушку амортизатора и включает электродвигатель 12, расположенный на балансире 3, ротор 1 со стойкой 17 и набором грузов 16 начинает перемещаться в обратном направлении, в сторону заднего конца балансира 3i
Дойдя до крайнего правого положения на балансире 3, бурт ротора И нажимает на левый концевой отключатель 21 и выключает электродвигатель 12, расположенный на балансире 3, одновременно происходит включение электродвигателя 40, связанного
18
с моторной головкой 35, и задний конец балансира 3 под действием набора грузов 16, противовесов 11 и силы тяги ротора 38 электродвигателя 0, связанного с моторной головкой 35, начинает опускаться, а передний конец балансира 3 с головкой 4 пойдет вверх, увлекая за собой колонну насосных штанг, плунжер скважинного насоса и столб жидкости в скважине. Дойдя до правого амортизатора-ограничителя 25 с вмонтированным в него концевым включателем, правое плечо балансира 3 нажимает на подушку амортизатора и включает электродвигатель 12, расположенный на балансире 8, одновременно происходит выключение электродвигателя ku, связанного с моторной головкой 35,и ротор 1 со стойкой 17 и набором грузов 16 начинает перемещаться опять в сторону передней головки . Далее работа станка-качалки осуществляется в той же последовательности.
Из всех существующих конструкций станков-качалок станок-качалка, изображенный на фиг. kf является наиболее уравновешенной системой. В этом станке-качалке применен принцип распределения нагрузки как в системе уравновешивания, так и в системе его привода, т.е. частъ функции уравновешивания приходится на двигатель, а часть - на грузы, то же имеет мест в приводе станка-качалки.
Таким образом, в обоих случаях используется сила гра тации как движущая сила, причем в приводе двигатель перемещает грузы по наклонной плоскости (угол наклона которой не превьвиает 30), а не по вертикали, что дает возможность применить двигатель малой мощности.
Двигатель, работающий в системе уравновешивания станка-качалки, за счет применения вышеуказанного принципа распределения нагрузки, также имеет небольшую мощность, а суммарная мощность обоих двигателей таким образом меньше мощности электродвигателя существующего станка-качалки той же грузоподъемности.
Изменение длины хода станка-качалки в четырех представленных вар иантах может быть осуществлено пу;Тем перестановки и закрепления в нужном положении концевых отключателей 21 и 22 на балансире 3 и аморти99
заторов-ограничителей 2 и 25 на опорной стойке 2.
Плавное изменение чисел качания балансира в широких пределах в предлагаемых вариантах станка-качалки может быть достигнуто плавным увеличением или уменьшением скорости возвратно-поступательного перемещения статора или ротора электродвигателя посредством известных компактных, легких тиристорных преобразователей частоты электрического тока.
При необходимости осуществления спуско-подъемных операций статор 13 электродвигателя 12 {фиг. 1) или ротор Т электродвигателя 12 (фиг,2k) с набором грузов 16 переводится в крайнее левое положение на балансире 3 двигатели отключаются и станок-качалка затормаживается в этом положении посредством тормозного устройства 23; с головки k балансира снимается канатная подвеска 2б, головка поворачивается в сторону от оси скважины, после чего постепенно разводятся тормозные колодки (не показаны) тормозного устройства 23, удерживающие тормозной шкив (не показан) , и балансир опускается на правый амортизатор-ограничитель 25.
При этом статор электродвигателя или его ротор с набором грузов не смогут опуститься по балансиру станка-качалки вниз, так как удерживаются магнитными боковыми колодками (не показаны), вступающими в мгновенное (после выключения двигателя на балансире) сцепление с направляющими 15.
110
Вообще же самопроизвольный выход электродвигателя с набором грузов за пределы балансира невозможен (даже при выходе из строя его тормозной системы), так как его положение на балансире ограничено с боков двумя направляющими 15, а на концах балансира упорными стойками 19 и 20.
Формула изобретения
Станок-качалка, содержащий основание, опорную стойку, балансир, связанный с установленным на опорной стойке подшипником, электродвигатель, противовесы и тормозное устройство, отличающийся тем, что, с целью повышения эффективности его работы путем облегчения и ускорения процессов изменения длины хода и числа качаний, а также снижения мощности электродвигателя, последний выполнен в виде линейного асинхронного двигателя с реверсивным возвратно-поступательно движущимся рабочим органом, расположенного на балансире, который снабжен направляющими и установленным в них с возможностью перемещения, по меньшей мере, одним набором грузов, связанным с возвратно-поступательно движущимся рабочим органом двигателя..
Источники информации, принятые во внимание при экспертизе
Фиг.г
Фие.д
Фиг.
