(54) СПОСОБ УПРАВЛЕНИЯ СИММЕТРИРУЮЩИМ УСТРОЙСТВОМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического симметрирования токов и стабилизации заданного коэффициента мощности трехфазной системы | 1980 |
|
SU920959A1 |
| Симметрирующее устройство для трехфазной четырехпроводной электрической сети | 1981 |
|
SU982146A1 |
| Способ управления симметризатором трехфазной четырехпроводной сети | 1983 |
|
SU1259408A1 |
| Способ симметрирования трехфазной сети | 1987 |
|
SU1504724A1 |
| Устройство для симметрирования трехфазных сетей | 1986 |
|
SU1328879A1 |
| Симметрирующее устройство для трехфазной четырехпроводной электрической сети | 1979 |
|
SU862313A1 |
| Устройство для автоматического симметрирования несимметричных нагрузок в трехфазных трехпроводных системах | 1983 |
|
SU1130948A1 |
| Устройство для симметрирования трехфазных сетей | 1982 |
|
SU1037377A2 |
| СПОСОБ СИММЕТРИРОВАНИЯ ФАЗНЫХ ТОКОВ ТРЁХФАЗНОЙ ЧЕТЫРЁХПРОВОДНОЙ ЛИНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2598760C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО СИММЕТРИРОВАНИЯ ТОКОВ МНОГОФАЗНОЙ СИСТЕМЫ ПО ОДНОЙ ИЗ ФАЗ | 2008 |
|
RU2390897C1 |
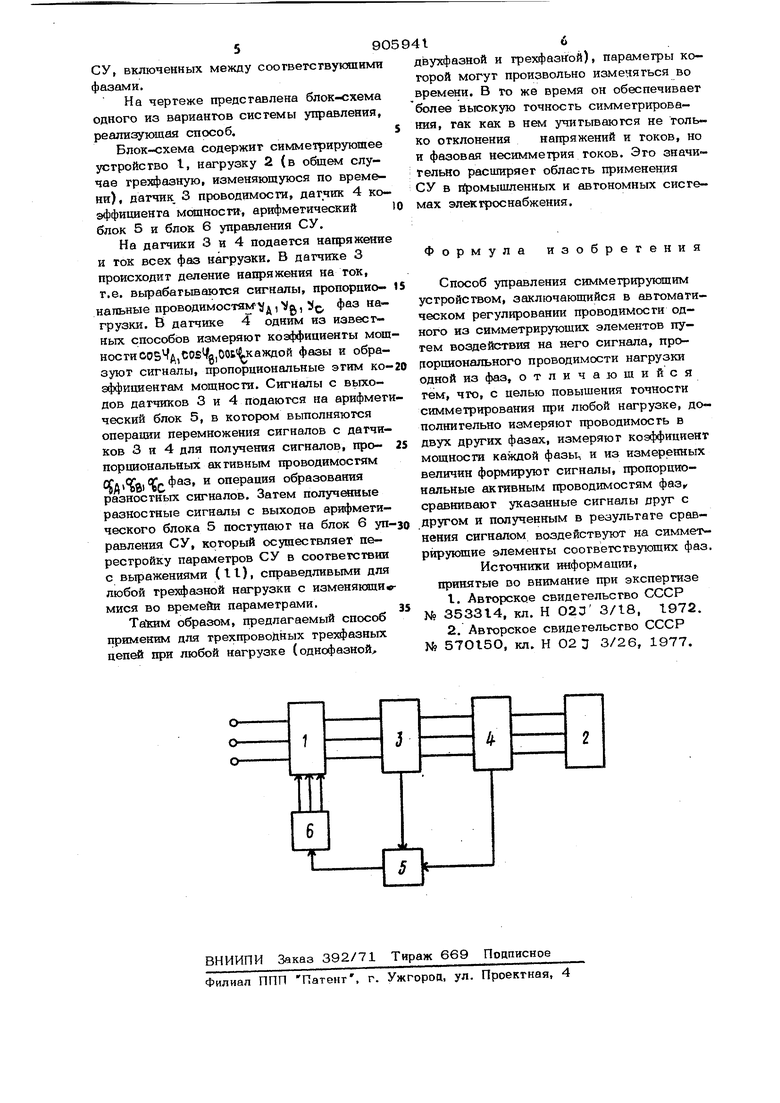
Изобретение относится к эпектротех- нике и может быть использовано в симметрирующих устройствах (СУ), предназначенных дня симметрирования токов трехфазных сетей при подключении к ним трехфазных нагрузок, изменяющихся по характеру и величине. Известен способ автоматического ре- Тупирования симметрирующих устройств . трехфазных сетей при трехфазной нагрузке по отключению напряжения flj. Недостатком этого способа является то, что при реапизации не учитывается отклонение других параметров. Наиболее близким к предлагаемому я ляется способ управления симметрирующим устройством, основанный на автома тическом регулировании величины одного из симметрирующих элементов путем воз действия на него сигнала, пропорциональ ного проводимости нагрузки, полученного по измеренным значениям тока и напряжения I2j. Недостатком известного способа является то, что он пригоден для симметрирования трехфазных сетей только при однофазных нагрузках, что существенно ограничивает область его применения. Кроме того, способ не может обеспечить высокую точность симметрирования при наличии фазовой несимметрии, т.е. при произвольном характере нагрузки. Цель изобретения - повышение точности симметрирования при любой нагрузке. Указанная цель достигается тем, что согласно способу управления симметрирующим устройством, заключающемуся в автоматическом регулировании проводимости одного из симметрирующих элементов путем воздействия на него сигнала,, пропорционального проводимости нагрузки одной из фаз, дополнительно измеряют проводимость в двух других фазах, измеряют коэффициент мощности каждой фазы и из измеренных величин формируют сигналы, пропорциональные активным прово- димостям фаз, сравнивают указанные сиг3905941напы друг с другом и попученным в резу гЕьтате сравнения сигнапом воздействуют на симметрирующие элементы соответствующих фаз. Пусть трехфазная система токов вj трехпроводной трехфазной сети содержит составляюшую обратной последовательности )C) гДеЛд,:, комплексы фазных токов; to j Urf)) комппекс тока обратной пос педовате пьности; 1 фазный множитель. СУ дпя компенсации токов обратной поспедоватепьности в трехфазной цепи в 15 обшем сотучае должно содержать три элeменте, подключенных на гганейные напряжения. Эти элементы выбирают чисто реактивными с проводимостями С - ЧОV-i Ai (20 V o- b c No- V;WuVAs) гдеТв1Ы V ) - симметричная часть параметров СУ; ЛУдд ,ДЧп, uVjv - несимметричные или регулируемые части параметров СУ, )0- ( з« причем Дпя тока обратной поспедоватепьносIX при симметричной системе напряжений мож.но получить следующее выражение:,., :J,V3uv,t5} где V - фазное напряжение сети, ) По усповию компенсации тока обратной поспедоватепьности i if-4af -« С1ййметричная система уравнений для ве шчин АЧ,,., uNjv и Чд спедуюшая: , i(i4 4d4ft4d Nf g)(т) |(... где зГлч- сопряженный комппекс тока об ратной поспедоватепьности, Решая систему управпений (7), находимус эт щи от гд же ,(a)i ). ). Выразив параметры симметрирующего ройства через симметрируемые токи :г- и фазовые сдвиги Ли, п в t, х токов по отношению к соответствуюм фазным напряжениям, используя соошение (1), получаем A-fWl u sV A AJ; 49) V-WU-lV5V s4g), 005.4д, 005 . c коэффициенты шности каждой фазы. А.Т Ч- сЬЬфа. Учитывая, что ния (9) записываем ввиде (aC sifg-:j Gc 54J; )i О А л. ттш -- if4 г т л J . V-гW A 8Cos a). Ч-щ- в) ) i.,,Oes4j-,H 0054oактивные проводимости фаз нагрузки. Таким образом, в предлагаемом способе для управления СУ необходимо вьтолнятъ следующие операции: образовывать сигналы, пропорциональные полным проводимостям д ,1/а, -,пугем деления напряжения на ГОК каждой фазы; образовывать сигналы, пропорциональные коэффициентам мощности сое д,СОЗЧа,С05 каждой фазы; формировать сигналы, пропорциональные активным проводимостям фаз, путем перемножения сигналов проводймосги и коэффициента мощности каждой фазы; по Разносги каждой пары этих сигналов образовывать управлякнцие С1тгналы согласно вьфажениям (11) и этими сигналами воздейсгвовагь на три реактивных элемента СУ, включенных между соответствующими фазами. На чертеже представлена блок-схема одного из вариантов системы управления, реализующая способ. Блок-схема содержит симметрирующее устройство I, нагрузку 2 (в общем случае трехфазную, изменяющуюся по времени), датчик 3 проводимости, датчик 4 коэффициента мощности, арифметический блок 5 и блок 6 управления СУ. На датчики 3 и 4 подается напряжени и ток всех фаз нагрузки. В датчике 3 происходит деление напряжения на ток, т.е. вьфабатьшаются сигналы, пропорционапьные проводимостякг /д,/й, 11, нагрузки. В датчике 4 одним из известных способов измеряют коэффициенты мощ ности С05Чд,С05Цэ,ООЬЬ.каждой фазы и образуют сигналы, пропорциональные этим коэффициентам мощности. Сигналы с вьтходов датчиков 3 и 4 подаются на арифмети ческий блок 5, в котором вьшолняются операшга перемножения сигналов с датчиков 3 н 4 для получения сигналов, пропорциональных активным проводимоетям ОСл,а, CjJ. фаз, и операция образования разностных сигналов. Затем полученные разностные сигналы с выходов арифметического блока 5 поступают на блок 6 управления СУ, который осуществляет перестройку параметров СУ в соответс геии с вьфажениями (11), справедливыми для любой трехфазной нагрузки с изменяющие мися во времейи параметрами. TataiM образом, предлагаемый способ применим для трехпроводных трехфазных цепей при любой нагрузке (однофазной. двухфазной и трехфазной), параметры которой могут произвольно изменяться во времени. В то же время он обеспечивает более вьюокую точность симметрирования, так как в нем учитываются не только отклонения напряжений и токов, но и фазовая несимметрия токов. Это значительно расширяет область применения СУ в гфомышленных и автономных системах электроснабжения. Формула изобре тения Способ управления симметрирующим устройством, заключающийся в автоматическом регулировании проводимости одного из симметрирующих элементов путем воздействия на него сигнала, про юрционального проводимости нагрузки одной из фаз, отличающийся тем, что, с целью повышения точности симметрирования при любой нагрузке, дополнительно измеряют проводимость в двух других фазах, измеряют коэффициент мощности каждой фазы, и из измеренных величин формируют сигналы, пропорциональные активным проводимостям фазк сравнивают указанные сигналы друг с другом и полученным в результате сравнения сигналом воздействуют на симметр1Фующие элементы соответствующих фаз. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 353314, кл. Н 023 3/18, 1972. 2.Авторское свидетельство СССР № 57О15О, кл. Н O2:j 3/26, 1977.
