С54) ПЕРЕМЕННЫЙ РЕЗИСТОР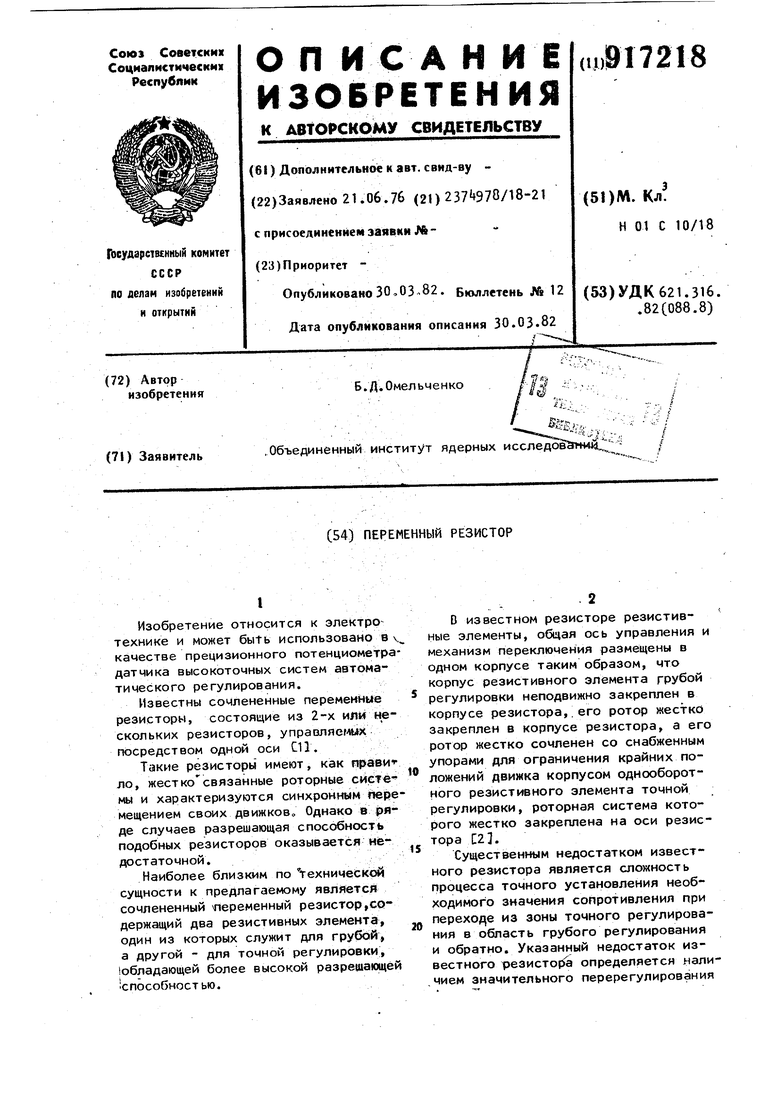
| название | год | авторы | номер документа |
|---|---|---|---|
| Многооборотный потенциометр | 1979 |
|
SU890452A1 |
| Переменный резистор | 1984 |
|
SU1269212A1 |
| Переменный резистор | 1974 |
|
SU512497A2 |
| СИГНАЛИЗАТОР ДОСТИЖЕНИЯ ЗАДАННОЙ СКОРОСТИ | 2000 |
|
RU2177158C1 |
| ГИДРАВЛИЧЕСКИЙ ВАРИАТОР С ВЫСОКИМ ПЕРЕДАТОЧНЫМ ЧИСЛОМ | 2010 |
|
RU2451851C1 |
| Центробежный экстрактор с регулируемым гидрозатвором | 2024 |
|
RU2837436C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2049244C1 |
| РОТАЦИОННАЯ ПЕЧАТНАЯ МАШИНА С ОБЪЕДИНЕННЫМИ ПАРАМИ В ГРУППЫ ОФСЕТНЫМИ И ФОРМНЫМИ ЦИЛИНДРАМИ | 1994 |
|
RU2127668C1 |
| Устройство для регулировки закрытой высоты кривошипного пресса | 1983 |
|
SU1127782A1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ТИГУНЦЕВА | 2011 |
|
RU2489582C2 |
Изобретение относится к электротехнике и может быть использовано в качестве прецизионного потенциометр датчика высокоточных систем автоматического регулирования. Известны сочлененные переменные резисторы, состоящие из 2-х ия« не скольких резисторов, yпpat ляefЛli x посредством одной оси СП. Такие резисторы имеют, как прави ло, жесткосвязанные роторные сиете мы и характеризуются синхронным пер мещением своих движков Однако в ря де случаев разрешающая способность подобных резисторов оказывается Н(Вдостаточной. Наиболее близким по технической сущности к предлагаемому является сочлененный переменный резистор,содержащий два резистивных элемента, один из которых служит для грубой, а другой - для точной регулировки, Обладающей более высокой разрешающе способностью. В известном резисторе резистивные элементы, общая ось управления и механизм переключения размещены в одном корпусе таким образом, что корпус резистивного элемента гРУбой регулировки неподвижно закреплен в корпусе резистора,его ротор жестко закреплен в корпусе резистора, а его ротор жестко сочленен со снабженным упорами для ограничения крайних положений движка корпусом однооборотного резистивного элемента точной регулировки, роторная система которого жестко закреплена на оси резистора С2. Существенным недостатком известного резистора является сложность процесса точного установления необходимого значения сопротивления при перехо/ е из зоны точного регулирования в область грубого регулирования и обратно. Указанный недостаток известного резистора определяется наличием значительного перерегулирования
391
при переходе из одной зоны регулирования в другую. Это перерегулирование вызывается в основном двумя обстоятельствами: во-первых, тем, что скорости вращения роторов резисторов точ ной и грубой регулировки равны, и, во-вторых, малой ценой зоны томного регулирования, которая выбирается такой, исходя из .необходимости получения высокой разрешающей способноети. резистора.
Тенденция к перерегулированию, которая особенно велика при дистанционном управлении резистором, с помощью моторного привода и может быть причиной автоколебаний системы регулирова ния, является характерной отрицательной особенностью известной конструкции. Перерегулирование в известной конструкции может быть уменьшено только за счет снижения разрешающей способности. Оба эти обстоятельства являются существенными и снижают эксплуатационную ценность известного резистора.
Цель изобретения - упрощение процесса регулирования величины сопротив ления при переходе из зоны точного регулирования в область грубого регулирования и обратно
Поставленная цель достигается тем, что ротор резистивного элемента грубой регулировки и корпус резистивного элемента точной регулировки сочлечены по осям вращения с помощью механической передачи с передаточным числом большим единицы. Дальнейшее упрощение указанного процесса достигается тем, что резистивный элемент точной регулировки выполнен многооборотным.
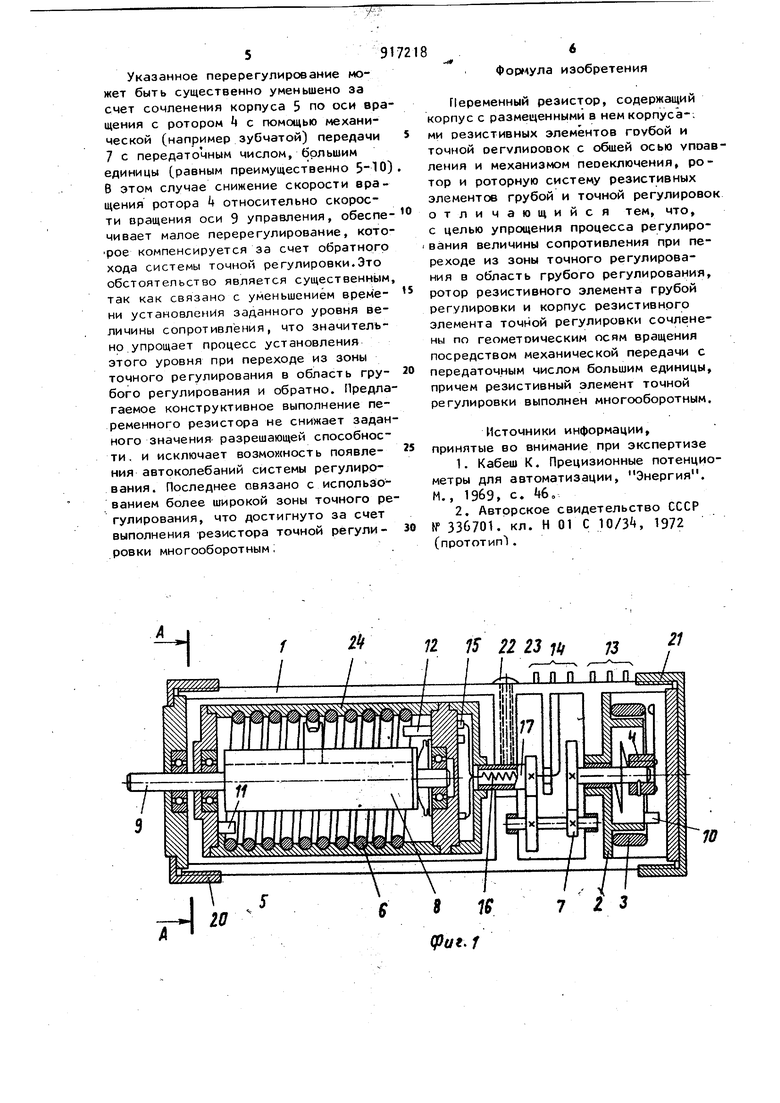
На фиг. 1 представлен переменный резистор;на фиг. 2 - разрез А-А на фиг.1; на фиг. 3 одна из возмож-ных схем соединения резистивных элементов точного и грубого регулирования. I ,. .1
Переменный резистор содержит корпус 1 , в котором неподвижно закреплен корпус 2 резистивного элемента 3 грубой регулировки. Ротор резистивного элемента 3 сочленен по геометрическоу оси вращения с корпусом 5 многооборотного резистивного элемента 6 точной регулировки с помощью
механической (например зубчатой) передачи 7 с передаточным числом большим единицы.Роторная система В резистив84
ного элемента 6 жестко закреплена на оси 9 управления переменного резистора. Резистивные элементы 3 и 6 снабжены упорами 10 - 12 (соответственно) для ограничения рабочей зоны регулирования. Выводы 13 резистивного элемента 3 и выводы Н резистивного элемента 6 смонтированы на корпусе 1 резистора.При этом связь выводов 1 с контактными зажимами 15 резистивного элемента 6 осуществляется с помощью гибких проводников 16, свитых в виде спирали и размещенных D полости оси 17 корпуса 5, имеет сквозное отверстие по гео|метрической оси вращения. Корпус 1 резистора выполнен разъемным и состоит из двух симметричных половин 18 и 19, скрепленных по торцам крышками 20 и 21. Половина 18 корпуса 1 имеет резьбовое отверстие, в которое ввернут винт 22 тормозной системы корпуса 5. Необходимый тормозной момент выбирается путем изменения нажатия винта 22 на подшипник 23 скольжения, выполненный из фторопласта и имеющий сквозную прорезь по высоте.
Резистор работает следующим образом.
Основной рабочей областью резистора является зона точного регулирования, цена которой значительно (например, в 5-10 раз) превышает цену соответствующей зоны известного резистора. При вращении оси 9 управления скользящий контакт 2k роторной системы 8 перемещается по многооборотному резистивному элементу 6 точной регулировки, параллельно которому, с целью соглас ования цены зоны точного регулирования, подключен дополнительный резистор 25 (фиг. 3). При этом корпус 5 резистивного элемента 6 подторможен винтом 22. При необходимости произвести регулирование, превышающее по величине цену зоны точного регулирования, роторная система 8 входит в зацепление с упором 11 или 12 (в зависимости от направления регулирования) и приводит во вращение корпус 5 ось 17 которого с помощью зубчатой передачи 7 осуществляет поворот ротора Ц резистивного элемента 3 грубо, регулировки.
При переходе из зоны точного регулирования ,в область грубого регулирО1вания неизбежным является перерегул ирввание. 59 Указанное перерегулирование может быть существенно уменьшено за счет сочленения корпуса 5 по оси вра щения с ротором Ц с помощью механической (например зубчатой) передачи 7с передаточным числом, (зрльшим единицы (равным преимущественно 5-10 8этом случае снижение скорости вращения ротора k относительно скорости вращения оси 9 управления, обеспе чивает малое перерегулирование, кото рое компенсируется за счет обратного хода системы точной регулировки.Это обстоятельство является существеннь)м так как связано с уменьшением времени установления заданного уровня величины сопротивления, что значительно, упрощает процесс установления этого уровня при переходе из зоны точного регулирования в область грубого регулирования и обратно. Предла гаемое конструктивное выполнение переменного резистора не снижает задан ного значения разрешающей способности . и исключает возмох ность появления автоколебаний системы регулирования. Последнее связано с использованием более широкой зоны точного ре гулирования, что достигнуто за счет выполнения резистора точной регулировки многооборотным:. 72 75- 22 23 jif П л П П изобретения Переменный резистор, содержащий корпус с размещенными в нем корпуса-, ми резистивных элементов гоубой и точной регулировок с обшей осью упоавления и механизмом переключения, ротор и роторную систему резистивных элементов грубой и точной регулировок отличающийся тем, что, с целью упрощения процесса регулирования величины сопротивления при переходе из зоны точного регулирования в область грубого регулирования, ротор резистивного элемента грубой регулировки и корпус резистивного элемента точной регулировки сочленены по геометрическим осям вращения посредством механической передачи с передаточным числом большим единицы, причем резистивный элемент точной регулировки выполнен многооборотным. Источники информации, принятые во внимание при экспертизе 1.Кабеш К. Прецизионные потенциометры для автоматизации, Энергия. М., 1969, с. , 2.Авторское свидетельство СССР № 336701. кл. Н 01 С Ю/З, 1972 (прототип). 7J П П 4-XI
1S
%лг-I
uf. 3
