(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ СВОЙСТВ ГРУНТА


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СВОЙСТВ ГОРНЫХ ПОРОД | 1996 |
|
RU2111312C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ НА АБРАЗИВНОЕ ИЗНАШИВАНИЕ | 2018 |
|
RU2691639C1 |
| МОЛОТ | 1997 |
|
RU2123090C1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ УДАРНЫМ СПОСОБОМ | 2012 |
|
RU2517267C1 |
| МОЛОТ ДЛЯ ПОГРУЖЕНИЯ В ГРУНТ СТРОИТЕЛЬНЫХ ЭЛЕМЕНТОВ | 2002 |
|
RU2209877C1 |
| ТРОЛЛЕЙБУС С ЧАСТИЧНОЙ НЕЗАВИСИМОСТЬЮ ОТ КОНТАКТНОЙ СЕТИ | 2012 |
|
RU2493027C1 |
| УСТРОЙСТВО для 1'АЗРАБОТКИ МЕРЗЛОГО ГРУНТА | 1971 |
|
SU302452A1 |
| Способ погружения свай и устройство для его осуществления | 1990 |
|
SU1778240A1 |
| ПНЕВМАТИЧЕСКОЕ УДАРНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 1998 |
|
RU2147644C1 |
| СИСТЕМА ДЛЯ ГЕНЕРАЦИИ ВОЛН СЖАТИЯ В ПОДВОДНЫХ УСЛОВИЯХ | 2010 |
|
RU2526600C2 |
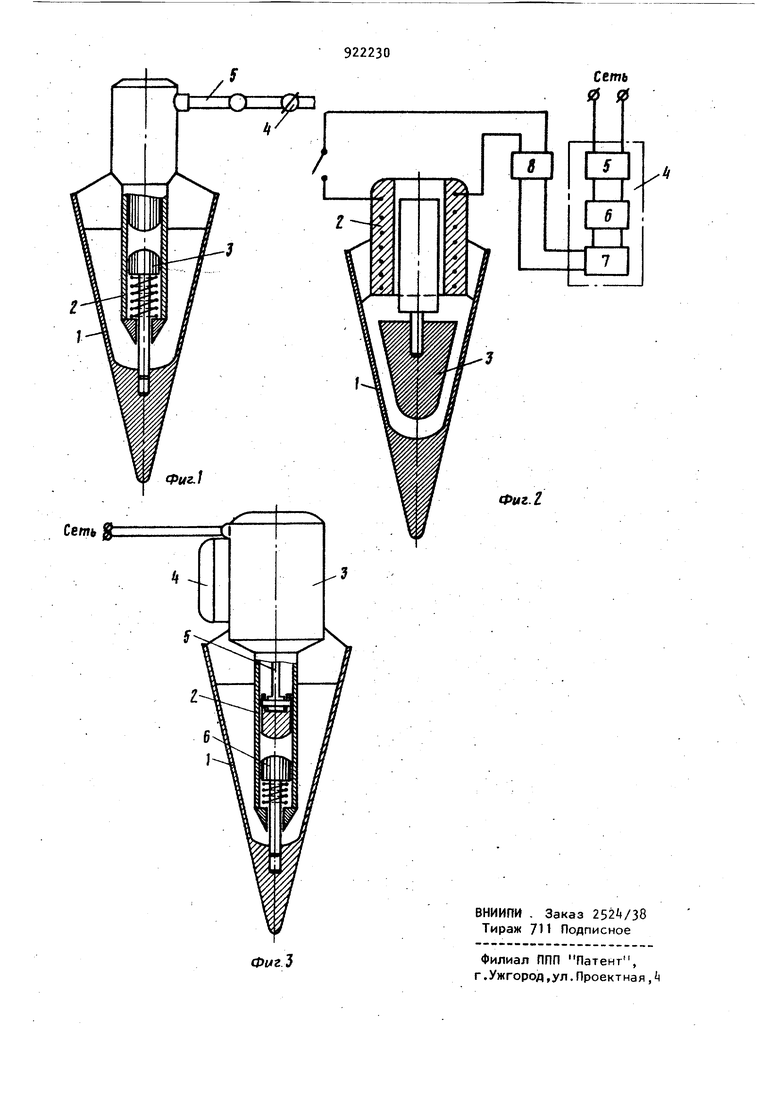
Изобретение относится к строительству, в частности к контролю качества возводимых сооружений. Известно устройство для определения механических свойств грунта, вклю чающее погружаемую в грунт с помощью падающего груза штангу с наконечником t П Наиболее Ьлизким по технической сущности к изобретению является устройство для определения механически свойств грунта, включающее конический индентор, механизм погружения с ударником и приводом, измерительное приспособление 12.. Недостатки известных устройств заключаются в низкой точности иссле дований из-за невозможности исключит колебания индентора в горизонтальной плоскости и в невозможности определе ния свойств грунтов, склонных к тИксотропным явлениям. Цель изобретения - повышение томности и расширение диапазона исследований. Цель достигается тем, что в устройстве для определения механических свойств грунта, включающем конический индентор, механизм погружения с ударником и приводом, измерительное приспособление, механизм погружения снабжен блоком регулирования частоты . ударов, конический индентор выполнен с полостью, причем привод механизма погружения закреплен в верхней части конического индентора, а ударник размещен в полости последнего. А также тем,ЧТО привод механизма.погружения выполнен пневматическим, а блок регулирования частоты ударов - в виде регулятора расхода воздуха. Кроме того, привод механизма погружения выполнен с катушкой электромагнита, взаимодействующей с ударником, блок регулирования частоты ударов состоит из источника питания, реле времени 922 соединен после исполнительного реле и довательно с катушкой электромагнита. Кроме того,привод механизма погружения состоит из электролвигателя с редуктором и кривошипно-шатунным механизмом, а блок регулирования частоты ударов включает регулятор частоты, вращения вала электродвигателя или редуктора. На фиг. 1 изображен вариант выполнения устройства с пневматическим приводом механизма погружения; на фиг. 2 - то же, с электромагнитным приводом; на фиг. 3 то же, с приво дом механизма погружения в виде элек тродвигателя . Устройство по первому варианту (фиг. 1) содержит конический полый индентор 1, в верхней части которого закреплен пневматический механизм 2 для погружения индентора 1 в грунт, взаимодействующий с ударником 3, раз мещенным в полости конического инден тора 1, и снабжен блоком регулирования частоты ударов в виде регулятора Ц расхода воздуха (дросселя), включе ного в магистраль 5 подачи воздуха к пневматическому механизму, 2. Устройство .работает следующим образом. После включения подачи воздуха из магистрали 5 с помощью известных средств, например воздушного крана, к пневматическому механизму 2 производится серия ударов ударником 3 в нижнее основание индентора 1, достаточное для проникания индентора 1 в грунт за время, обусловленное механическими свойствами грунта. Величина времени проникания индентора 1 в грунт сопоставляется с заранее известной зависимостью времени проникания от механических характеристик грунта, определенного на стадии тарировки устройства. На основании сопоставления эмпирической и тарировоч ной величин 1.времени лроникания ин-. дентора 1 в грунт делается вывод о показателях механических свойств грунта. При исследовании грунта, склонного к тиксотропным измерениям или разжижению, производится несколько испытаний грунта при различной частоте ударов ударника 3, что достигается регулированием расхода воздуха дросселем 4 в воздушной магистрали 5 Устройство по второму варианту (фиг. 2) содержит конический полый 4 индентор 1, в верхней части которого закреплен электромагнитный механизм 2 для погружения индентора 1 в грунт. Механизм 2 погружения взаимодействует с ударником 3, размещенным в полости конического индентора 1. Механизм 2 погружения снабжен блоком k регулирования частоты ударов, содержащим блок 5 питания, реле 6 времени (мультивибратор), исполнительное реле 7 и промежуточное реле 8, причем блок k регулирования частоты ударов включен в цепь последовательно с катушкой электромагнитного механизма 2. Устройство работает следующим образом. При включении катушки электромагнитного механизма 2 в электрическую цепь производится подъем ударника 3 в верхнее положение. При размыкании электрической цепи происходит свободное падение ударника 3, вследствие чего ударник 3 производит удар по нижнему основанию конического иидентора . Конический индентор 1 под действием циклической ударной нагрузки проникает в грунт за определенное время, обусловленное механическими свойствами грунта. Время погружения индентора 1 в грунт сопоставляется с тарировочным его значением. На основании сопоставления делается вывод о величине показателей механических свойств грунта. При исследовании свойств грунта, склонного к тиксотропным изменениям или разжижению, производится несколько испытаний при различной частоте ударов Ударника 3. Изменение частоты ударов производится с помощью реле 6 времени (мультивибратора), включающего через определенные промежутки времени исполнитeл И oe реле 7, контакты которого включаГют промежуточное реле 8, последовательно соединенное с катушкой электромагнитного механизма 2. Работоспособность реле 6 времени (мультивибратора) и исполнительного реле 7 обеспечивается блоком 5 питания. Устройство по третьему варианту (фиг, 3) содержит конический полый индентор 1, в верхней части которого закреплен механизм 2 его гюгоужения, содержащий электродвигатель 3, взаимодействующий с ударником 6, размещенным в полости конического инден,тора через редуктор и кривошкшюшатунныймеханизм 5, а механизм погружения снабжен блоком регулирования частоты ударов, выполненным по известной схеме в виде регулятора скорости вращения вала двигателя или редуктора. .
Устройство работает следующим образом.
При включении электродвигателя 3 в электрическую цепь элементы кривошипно-шатунного механизма 5 взаимо действуют с-ударником 6, размещенным в полости конического индентора 1, вследствие чего производятся удары по нижнему основанию индентора 1 ударником 6. Индентор 1 погружается в грунт за время, обусловленное мощностью ударного импульса, частотой ударов и механическими свойствами грунта. На основании сопоставления величины времени погружения индентора 1 в грунт и времени погружения по тарировочной кривой делается вывод о показателях механических свойств грунта.
При исследовании грунта, склонного к тиксотропным измерениям или разжижению, испытания производят при различной частоте ударов ударника.6. Изменение частоты ударов производят путем изменения числа оборотов вала электродвигателя. 3 или редуктора k,
При возведении земляных сооружени (площадок, насыпей, дамб, плотин), высота отсыпаемых слоев грунта принимается в зависимости от принятых способов уплотнения. Для контроля плотности среды по высоте уплотняемого слоя высота конического индентора принимается равной высоте отсыпаемого слоя грунта.
Эффект от применения изобретения заключается в повышении точности определения свойств грунта за счет исключения вредного воздействия колебаний штанг в горизонтальном направлеНИИ на процесс пооникания индентора в грунт. Благодаря тому, что механиз погружения индентора снабжен блоком регулирования частоты механических импульсов, обеспечивается возможност
определения показателей тиксотропности грунтов и потери устойчивости грунтов, склонных k разжижению.
Формула изобретения
. Устройство по п. 1, о т л и чающееся тем, что привод механизма погружения состоит из электродвигателя с редуктором и кривошипношатунным механизмом, а блок регулирования частоты ударов включает регулятор частоты вращения вала электродвигателя или редуктора. I,.- ...
Источники информации,
принятые во внимание при экспертизе
