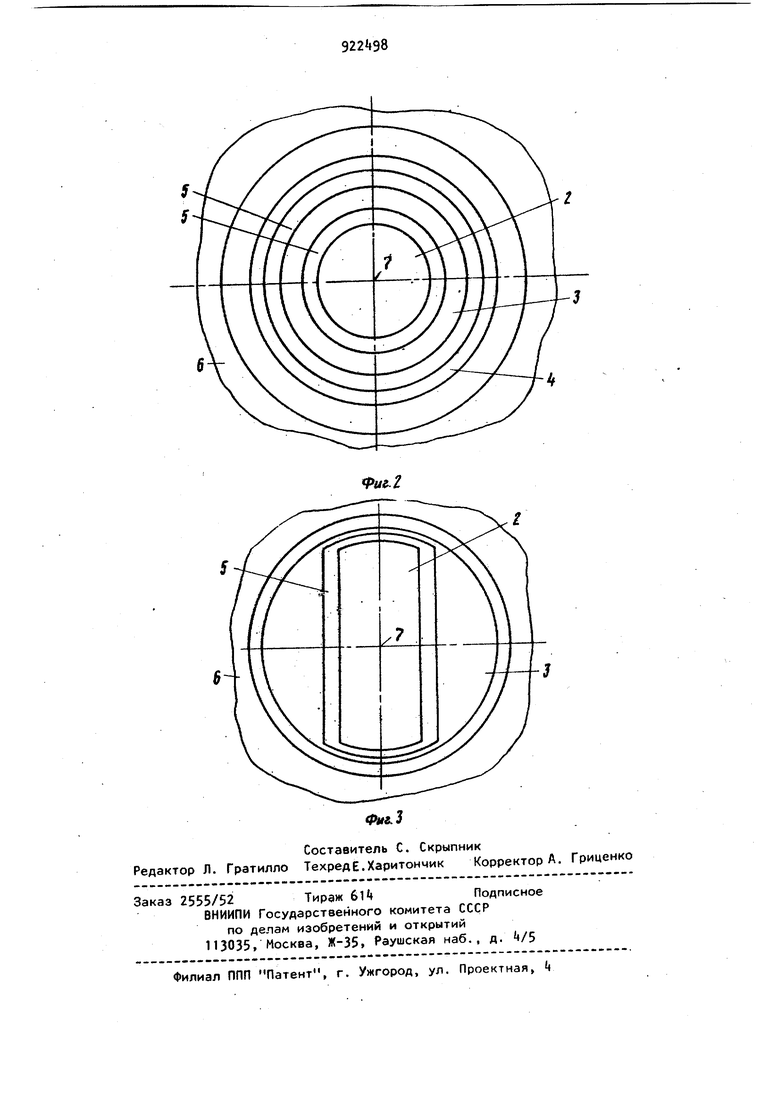
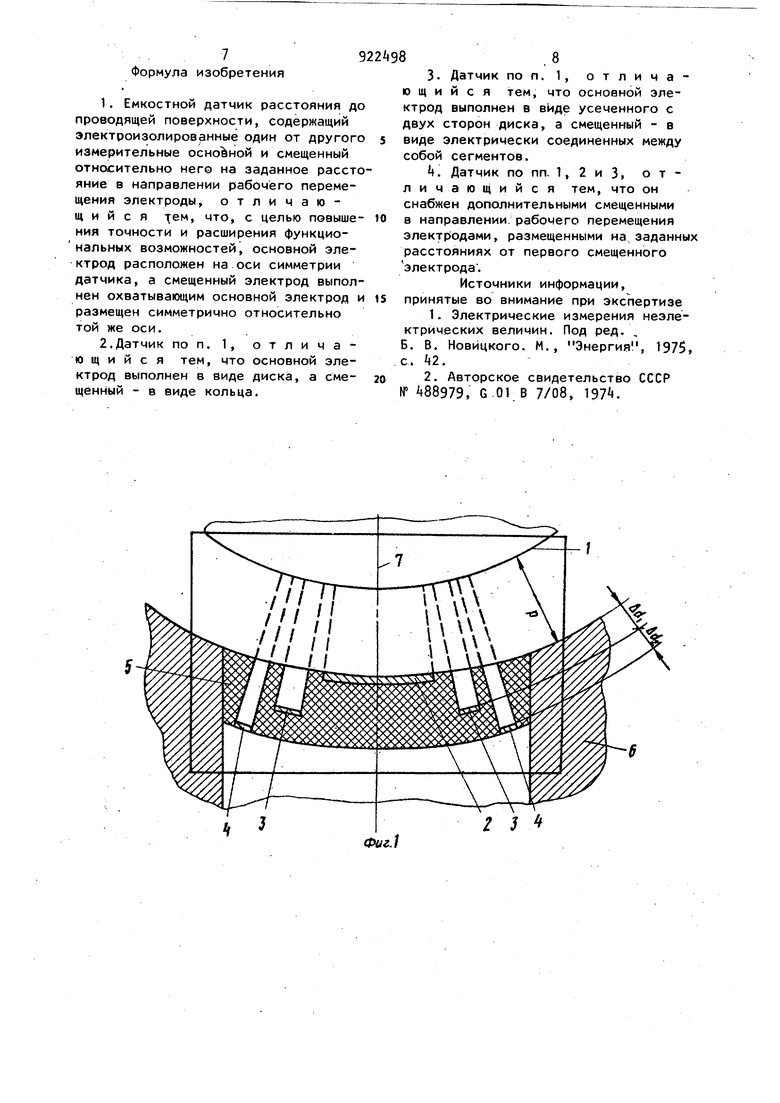
(5) ЕМКОСТНОЙ ДАТЧИК РАССТОЯНИЯ ДО ПРОВОДЯЩЕЙ ПОВЕРХНОСТИ. Изобретение относится к контрольно-измерительной технике и может быт использовано для измерения малых перемещений и зазоров между двумя поверхностями при их взаимном перемеще нии или перемешении одной из них относительно другой (проводящей) повер ности, с/.жной конфигурации, например, между ступенчатым валом и втулкой (в двигателях внутреннегб сгорания) между втулкой и вращающимися под углом к втулке лопатками турбины при измерении параметров эллипсности сечения вала (эксцентриситета) и т.д Известны емкостные, индуктивные или индукционные датчики зазора Дифференциального типа, с помощью которых реализуется равное, но противоположное по знаку воздействие влияющих параметров на два одинаковых чувствительных элемента,, сигналы которых вычитаются, благодаря чему некоторые из систематических погрешностей, например, связанные с изменениями напряжения питания и температуры, взаимно компенсируются fl. Однако из-за возможного отличия параметров средЬ а зазоре (температуры, состава среды, влажности, давлений и т.д.) вблизи каждого чувствительного элемента, временной нестабильности этих параметров, неидеальных окружностей вала и втулки и т.п., точность таких датчиков оказывается недостаточной при необходимости осуществления измерений в условиях значительных изменений параметров парогазовой или жидкостной среды в зазоре, например, в работающих энергоагрегатах. Наиболее близким к предлагаемому техническим решением является емкостой датчик расстояния до проводящей оверхности, содержащий электроизоированные один от другого измериельные основной и смещенный относиельно него на заданное расстояние в 9 направлении рабочего перемещения электроды 12. Однако известный датчик имеет пло ские электроды и позволяет измерять изменение зазоров лишь между плоскими поверхностями, остающимися при своих рабочих перемещениях взаимно параллельными, а также его невозможно использовать,;, вследствие недостаточной точности, для измерения расстояний до проводящей поверхности сложной конфигурации, например криво линейной, -или для измерения расстояния до плоской поверхности, перемещающейся относительно датчика непараллельно поверхности его электродов или под неизвестным случайно измену(ющимся углом к направлению рабочего перемещения. Это обусловлено несимметрией конструкции измерительных электродов датчика, вследствие которой возникает погрешность измерений, пропорциональная сумме расстояний между центрами проекцией основного и смещенного электродов датчика на проводящую поверхность, до которой расстояние измеря ется. Цель изобретения - повышение точности и расширение функциональных возможностей (обеспечение .измерения расстояний до криволинейной или пере мещающейся под углом поверхности). Указанная цель достигается тем, что в емкостном датчике расстояния до проводящей поверхности, содержащем электроизолированные один от дру гого измерительные основной и смещенный относительно него на заданное расстояние в направлении рабочего пе ремещения электроды, основной электрод расположен на оси симметрии датчика, а смещенный электрод выполнен охватывающим основной электрод и раз мещен симметрично относительно той же оси. Кроме того, основной электрод может быть выполнен в виде диска, а смещенный - в виде кольца, или основ ной электрод выполнен в виде усеченного с двух сторон диска, а смещенный - в виде электрически соединенны между toбoй сегментов. Датчик может быть также снабжен дополнительными, смещенными в направлении рабочего перемещения электродами, размещенным на заданных расстояниях от первого смещенного электрода. На фиг. 1 представлен емкостный датчик, имеющий основной и два смеще 4 ных один относител1 но другого на за- данные расстояния Ad ., и ud( соответственно в направлении рабочего перемещения измерительных электродов, общий вид; на фиг. 2 - вариант исполнения датчика с основным электродом в диска и смещенными электродами в виде колец, вид сверху; на фиг. 3вариант исполнения датчика с основным электродом в виде усеченного с двух сторон диска и смещенным - в виде электрически соединенных между собой сегментов, вид сверху. Емкостной датчик расстояний до проводящей поверхности, например поверхности 1 вала, содержит измерительные основной электрод 2 и смещенные относительно него на заданные расстояния дд X, и udij электроды 3 и . Эти электроды изолированы один от другого диэлектриком 5 и размещены в теле, например, втулки 6. Основной электрод 2 выполнен симметричным и размещен на оси 7 симметрии датчика, а смещенные электроды 3 и охватывают основной электрод 2. Электроды подключены к измерительной схеме (не показано), в которой измеренные сигналы подвергаются соответствующей арифметической обработке. Вал, до поверхности 1 которого измеряется расстояние, является общим электродом. Датчик работает следующим образом (рассмотрен пример работы датчика с двумя электродами - основным и f f-| .1 I смещенныь1). Емкости С и C(j между каждым из электродов 2 и 3 датчика и общей проводящей поверхностью 1 зависят от расстояния между ними d и d + д d -, соответственно. В результате напряжения Ул, снимаемые с этих электродов (при фикрированном значении частоты питающего напряжения), будут равны V и гт,- где К - коэффициент пропорциональности;W - круговая частота напряжения питания; 5 и площади каждого из 3neKTt oдов;f - диэлектрическая проницаемост среды в зазоре между электро дами датчика и проводящей поверхностью; d - измеряемое расстояние; ud - нормированное смещение электродов 2 и 3, известное с погрешностью, не превышающей допустимую погрешность измерения. . Если площади электродов 2 и 3 оди наковы, то при соответствующей алгебраической обработке измеренных напряжений У,и Vn (вычитании и делени V на полученную разность), измеряемо расстояние d определяется следу ощим соотношением: , Ad/i vpX Если площади электродов не равны, то в формуле (2 ) появится коэффици- , ент пропорциональности, зависящий от соотношения этих площадей. Таким образом, результат измерения не зависит от диэлектрической проницаемо сти g, среды в зазоре, а следователыно и от изменений температуры, влажности, давления и состава среды,которые вли- i яют на ее величину. Искомое расстояние d ,до проводяще поверхности определяется измеренными значениями напряжений (токов или дру гих величин) и известным нормированным смещением Ad, погрешность которого из-за изменений, например темпе рётуры, как правило пренебрежимо-мала, вследствие одинаковости материалов, из которых изготовлены электроды. Благодаря тому, что измерительные электроды датчика (основной и смещен ный ) расположены симметрично, а .смещенный электрод охватывает основной, причем центры их лежат на оси 7 симметрии датчика, уменьшается влияние изменений угла между направлением рабочего перемещения и проводящей поверхностью, что повышает точность и расширяет функциональные возможности датчика. Например, если относительные перемещения датчика и проводящей поверхности осуществляются под углом, преимущественно, в одной плоскости целесообразно использование датчика с основным электродом в виде усеченного с двух сторон диска, а смещенным в виде связанных между собой сегментов (фиг. 3). При изменении расстояний до проводящей детали, перемещающейся под углом в двух плоскостях, например до вибрирующего вала, основной электрод датчика целесообразно ,выполнять в виде диска, а смещенный - в виде концентричного кольца (фиг. 2). При измерениях в широком диапазоне расстояний и повышенных требованиях к точности датчик может быть снабжен дополнительными электродами, смещенными на заданное расстояние от первого смещенного электрода. При использовании второго смещенного на величину ud «i электрода может быть исключено влияние паразитной емкости CQ подводящих проводов к датчику. При учете паразитной емкости CQ напряжения V, ,, снимаемые с электродов 2, 3 и соответственно будут равны К . dfud,-ft.a( nj Для компенсации погрешности измерений, обусловленной паразитной емкостью Сп, необходимо произвести алгебраическую обработку измеренных сигналов в соответствии с выражением {k}, согласно которому измеряемое расстояние d будет равно IV4) При учете нелинейности еще более высокого порядка необходимо применить еще один смещенный на. jfd электрод и т.д. Кольцевые электроды могут быть использованы также в качестве охранных колец для уменьшения влияния краевых эффектов. Таким образом, емкостный датчик позволяет повысить точность измерений и обеспечить измерение расстояний до криволинейной или перемещающейся под углом поверхности, т.е. расширяются его функциональные возможности. 7 Формула изобретения 1. Емкостной датчик расстояния д проводящей поверхности, содержащий электроизолированные один от другог измерительные основной и смещенный относительно него на заданное расст яние в направлении рабочего перемещения электроды, отличающийся тем, что, с целью повыше ния точности и расширения функциональных возможностей, основной электрод расположен на оси симметрии датчика, а смещенный электрод выпол нен охватывающим основной электрод размещен симметрично относительно той же оси. 2,Датчик по п. 1, отличающийся тем, что основной электрод выполнен в виде диска, а смещенный - в виде кольца. . 8 3. Датчик по п. 1, отличающийся тем, что основной электрод выполнен в виде усеченного с двух сторон диска, а смещенный - в виде электрически соединенных между собой сегментов. k. Датчик по пп. 1, 2 и 3, отличающийся тем, что он снабжен дополнительными смещенными в направлении, рабочего перемещения электродами, размещенными на заданных расстояниях от первого смещенного электрода. Источники информации, принятые во внимание при экспертизе 1. Электрические измерения неэлектрических величин. Под ред. , Б. В. Новицкого. М., Энергия , 1975, с. 2. 2. Авторское свидетельство СССР № 88979, G 01 В 7/08, 197.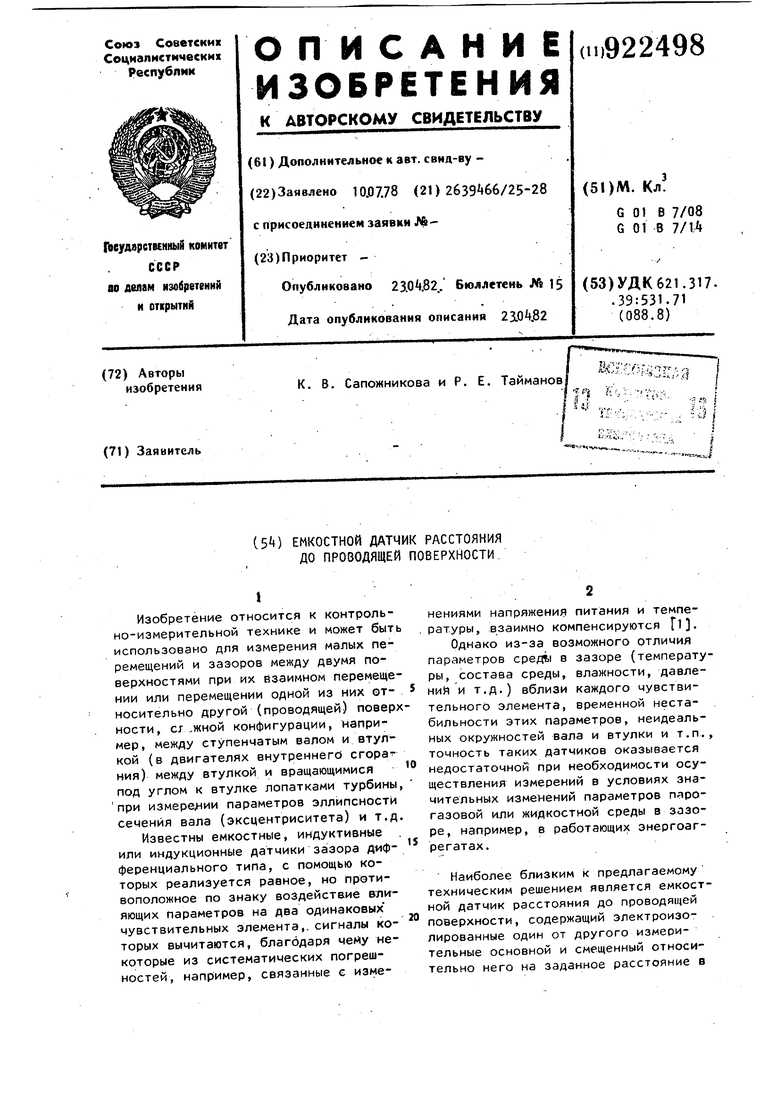
| название | год | авторы | номер документа |
|---|---|---|---|
| Емкостный датчик расстояния до проводящей поверхности | 1981 |
|
SU1002818A2 |
| Емкостной датчик расстояния до проводящей поверхности | 1987 |
|
SU1413410A2 |
| Устройство для измерения расстояний до проводящей поверхности | 1978 |
|
SU932208A1 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1996 |
|
RU2100778C1 |
| ИНТЕГРАЛЬНАЯ СИСТЕМА ДАТЧИКОВ | 2010 |
|
RU2532575C2 |
| ЕМКОСТНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2573447C2 |
| ЕМКОСТНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА С ДИФФЕРЕНЦИАЛЬНЫМИ ПАРАМИ | 2010 |
|
RU2559993C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| Емкостный датчик угла | 1977 |
|
SU836515A1 |
| ТВЕРДОТЕЛЬНЫЙ ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2018 |
|
RU2692122C1 |