(5) УСТРОЙСТВО ДЛЯ ТЕЛЕКОНТРОЛЯ БУРОВЫХ РАБОТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для телеконтроля буровых работ | 1975 |
|
SU610982A1 |
| Устройство для телеконтроля буровых работ | 1978 |
|
SU765853A1 |
| АБОНЕНТСКАЯ СТАНЦИЯ СПУТНИКОВОЙ СВЯЗИ | 2006 |
|
RU2314640C1 |
| Пункт управления системы телемеханики | 1975 |
|
SU558288A1 |
| Телемеханическая система | 1987 |
|
SU1424044A1 |
| УСТРОЙСТВО ПРИЕМА И ПЕРЕДАЧИ OFDM-СИГНАЛОВ С ПОВЫШЕННОЙ ПОМЕХОУСТОЙЧИВОСТЬЮ | 2010 |
|
RU2423002C1 |
| Телемеханическая система | 1984 |
|
SU1251147A1 |
| Система телемеханики | 1984 |
|
SU1257686A1 |
| Устройство для передачи и приема информации телеуправления сосредоточенными объектами | 1974 |
|
SU528000A1 |
| Система телемеханики | 1990 |
|
SU1711216A1 |
Изобретение относится к средствам технического обеспечения автоматизированной системы управления техноло гическими процессами бурения нефтяны и газовых . Поосновному авт. св. N 826386 устройство для телеконтроля буровых работ, содержащее на контролируемом пункте (КП) - буровой установке передающий тракт, содержащий кодер, модулятор и передатчик, датчики теле контроля параметров бурения, блок от бора новых данных, блок адаптации и блок уставок контролируемых параметров, выход которого соединен с пятым входом блока отбора новых данных, первый вход - со вторыми выходами датчиков телеконтроля параметров бурения второй вход - с выходом блока синхронизации и управления, на пуЯкте управления (ПУ) - приемный тракт, содержащий приемник, демодулятор и д кодер, блок адресов, подключенный к входам кодера и выходам декодера. блок синхронизации и управления, блок оперативной памяти, подключенный к декодеру, блок постоянной памяти, блок регистрации и отображения инфор мации, пульт управления, блок анали-, за контролируемых параметров и блок индикации, выход блока адресов соединен с первым входом блока, анализа контролируемых параметров, второй вход которого соединен с выходом блока постоянной памяти, выход - с первым входом блока индикации, второй вход которого соединен со вторым выходом пульта управления р J. Однако это устройство не обеспечивает оптимизации контроля за процессами бурения при изменении условий процесса бурения или при обнару) непредвиденных условий, встречаемых при проходке скважины. Целью изобретения является повышение точности устройства за счет обеспечения управления уставками контролируемых параметров процесса бурения.
Поставленная цель достигается тем, что в устройство для телекоитроля буровых работ на контролируемом пункте введен блок коррекции уставок контролируемых параметров и пульт ручного ввода информации, выход блока коррекции уставок соединен с третьим входом блока уставок контролируемых параметров, выход блока синхронизации и управления и третий выход декодера соед11нены соответственно с первым и вторым входами блока коррекции уста|Вок, выход пульта ручного ввода информации соединен с шестым входом блока отбора новых данных, на пун; те управления введен блок сопряжения с ЭВМ, выход которого соединен; с четвертым входом кодера, второй выход блока анализа параметров, третий выход пульта управления, третий выход блока синхронизации и управления и второй выход блока адресов соединены соответственно с первым, вторым, третьим и четвертым входами блока сопряжения с ЭВМ.
Задаваемая оптимальная программа бурения вводится в ЭВМ, периодически подключаемой к обслуживанию данной буровой; программа рассчитывается по прогнозируемым данным, например опыту бурения предыдущих скважин. В ходе процесса бурения поступающая информация накапливается в банке данных ы анализируется с целью корректи.ровки заданной программы бурения, и в случае необходимости с ЭВМ на устройство поступают команды для корректировки уставок контролируемых параметров бурения для вывода параметров в требуемую зону.
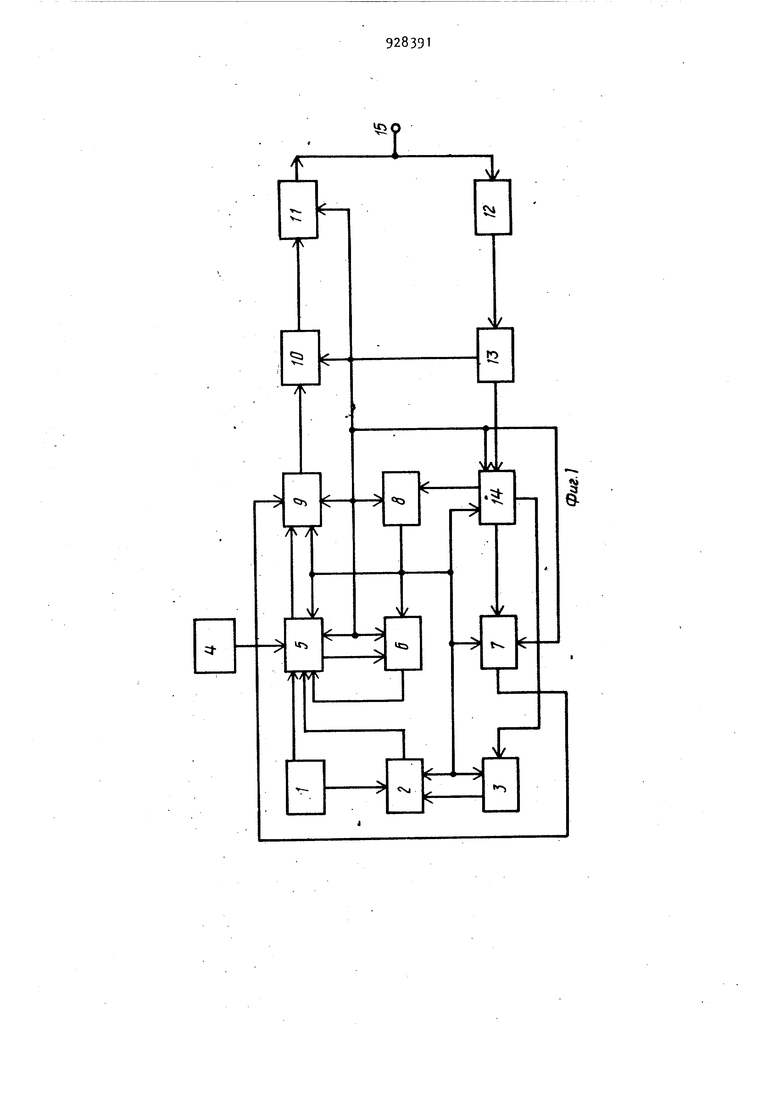
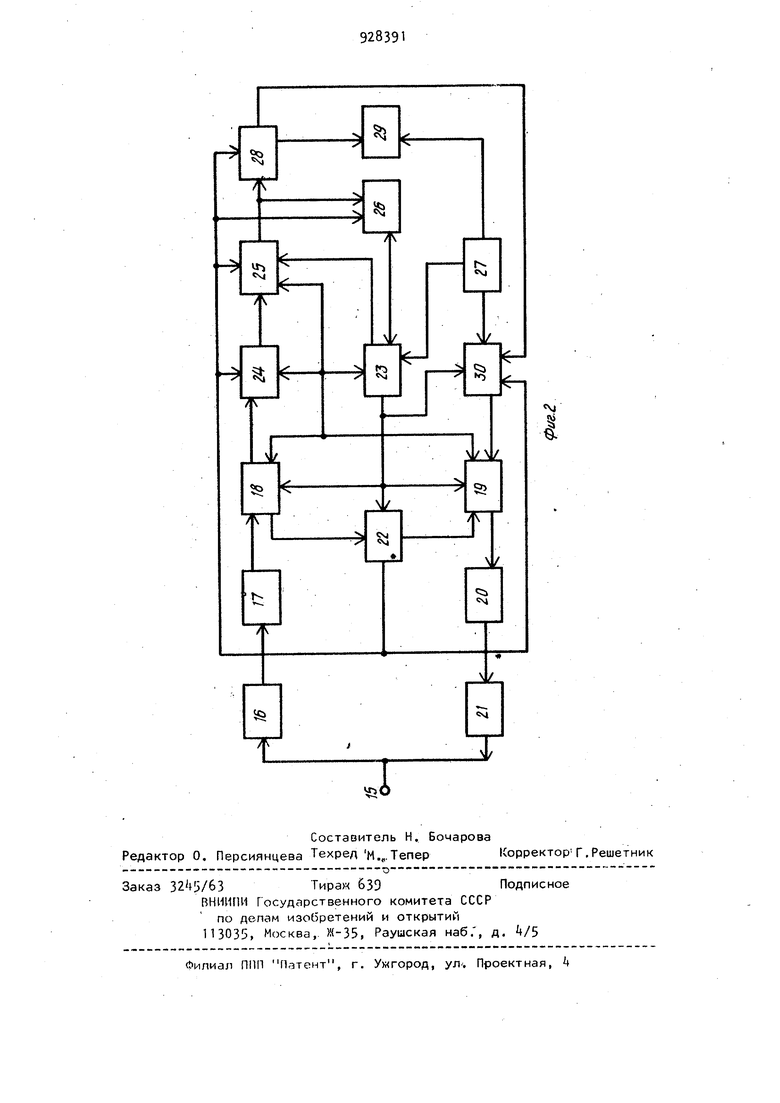
На фиг. 1 приведена блок-схема предлагаемого устройства, содержащая аппаратуру КП; на фиг. 2 - блок-схема, содержащая ПУ.
Аппаратура КП содержит датчики 1 телеконтроля параметров бурения, блок 2 уставок контролируемых параметров, блок 3 коррекции уставок контролируемых параметров; пультД ручного ввода информации, блок 5 отбора новых данных, блок 6 адаптации, блок 7 адресов, блок 8 синхронизации и управления, кодер 9, модулятор 10, передатчик 11, приемник 12, демодулятор 13, декодер 14, канал 15 связи.
Аппаратура ПУ содержит приемник 16 демодулятор 17, декодер 18, кодер 19, модулятор 20, передатчик 21, блок 22
дресов, блок 23 синхронизации и управления, блок 2k оперативной памяти, лок 25 постоянной памяти, блок 26 регистрации, пульт 27 управления, лок 28 анализа параметров, блок 29 индикации, блок 30 сопряжения с ЭВМ. На контролируемом пункте (фиг. 1) атчики 1 телеконтроля параметров урения соединены с блоком 2 уставок контролируемых параметров и с блоком 5 отбора новых данных, управляющим локом 6 адаптации. Пульт 4 ручного ввода соединен с шестым входом блока 3 отбора новых данных и предназначен для ввода постоянной в течение рейса долота информации (данные о олоте, параметры промывочной жидкости, тип бурильных труб и т.д.).
Блок 2 уставок конт ролируемых параметров соединен с блоком отбора новых данных и блоком 3 коррекции уставок, соединенным с декодером 1А и с блоком 8 синхронизации и управления. Выходы блока 5 отбора новых данных соединены с управляющими входами бло ка 6 адаптации. Адресные выходы последнего соединены с адресными входами блока 5 отбо{эа новых данных. Блок 7 адресов подключен к входам кодера 9 и выходам декодера 14. Блок 8 синхронизации и управления обеспечивает сопряжение между всеми блоками КП и функционирование их по заданному алгоритму работы. Модулятор 10 подключен к выходам кодера 9 входам передатчика 11. Передатчик 11 и приемник 12 подключены к каналу связи 15. Демодулятор 13 соединен с выходами приемника 12 и выходами декодера 14.
На пункте управления (фиг. 2) приемник 16 и передатчик 21 подключены к каналу связи 15. Последовательно с приемником 16 соединены демодулятор 17 и декодер 18, а с передатчиком 21 последовательно соединены модулятор 20 и кодер 19. Блок 22 адресов соединен со входом кодера 19 и выходами декодера 18, а также адресными входами блока 24 оперативной памяти, блока 25 постоянной памяти, блока 2б регистрации и отображения информации, блока 28 анализа параметров и блока 30 сопряжения с ЭВМ.
Блок 24 оперативной памяти подключен к выходам декодера 18 и входами блока 25 постоянной памяти, соединенного с блоком 26 регистрации и
отображения информации и с блоком 28 анализа парамет(1)ов.
Первый выход блока 28 анализа параметров соединен с блоком 29 индикации, второй вход которого соединен со вторым выходом пульта 27 управления о
Выход блока 30 сопряжения с ЭВМ соединен с Четвертым входом кодера 19 первый вход - со вторым выходом блока 28 анализа параметров, второй вход - с третьим выходом пульта 27 управления, третий вход - с выходом блока 23 синхронизации и управления, четвертый вход - с выходом блока 22 адресов.
Блок 23 синхронизации и управления обеспечивает сопряжение между всеми блоками ПУ, синхронную и синфазнуюработу ПУ с КП и заданные режимы работы
Рассмотрим функционирование устройства -при коррекции уставок контролируемых парам етров.
На контролируемом пункте (фиг. 1) при сеансе связи с ПУ в цикле опроса в автоматическом режиме при вызове данного контролируемого пункта в ручном режиме технологическая информация с выходов датчиков 1 поступает в блок 2 уставок контролируемых параметров, а также в блок 5 отбора новых данных. Блок 2 уставок сравнивает текущие значения параметров с введенными в него уставками и в случае выхода отклонений за допустимые пределы вырабатывает сигнал рассогласования. Информация с выходов пульта ручного ввода поступает в блок 5 отбора новых данных.
При изменений сигналов в байтах информации от блока 2 уставок, от пульта .ручного ввода или от датчиков 1 текуи1их значений контролируемых параметров блок 5 отбора новых данных формирует сигналы, поступающие на управлякмцие входы блока 6 адаптации. Последний формирует последовательно во времени сигналы адресов байтов с новыми данными о величинах контролируемых параметров или об отклонении их от оптимальных значений (если таковое имеет место), Эти сигналы с адресных выходов блока 6 адаптации поступают на соответствующие адресные входы блока 5 отбора новых данных, разрешая выдачу информации о текущих значениях контролируемых параметров и сигналах рассогласования в кодер 9
передающего тракта КП. На время выдачи информации блок 8 синхронизации и управления формирует сигнал запрета
ввода новой информации в блок 5 отбора новых данных. В кодере 9 информации каждого байта кодируется, модулятором 10 преобразуется в последовательные частотные посылки, поступающие через передатчик 11 в канал связи 15.
На пункте управления (фиг. 2) информация с КП в виде частотных посылок поступает из канала связи 15 в приемный тракт ПУ (приемник 16, демодулятор 17, декодер 18), где она проверяется и преобразуется в байты информации и синхронизирующие такты. Синхронизирующие такты поступают в блок 23 синхронизации и управления и запускают его. Принятый байт с кодом адреса КП сравнивается в блоке 22 адресоЪ с адресом вызванного КП. При совпадении адресов блок 22 адресов разрешает прием остальной информации в блок 2k оперативной памяти согласно поступившим адресам серий (номерам байтов). После окончания приема информации и.при отсутствии ошибки в ней блок 23 синхронизации и управления обеспечивает считывание принятой информации в блок 25 постоянной памяти , с выходов которого инфорМация выводится в блок 28 анализа параметров. Последний на первом выходе формирует код параметра, величина которого вышла из допустимых пределов. Сигнал с кодом отклонившегося параметра поступает в блок 29 индикации и включает соответствующие элементы, световой индикации и звуковой сигнализации. -Диспетчер принимает меры для вывода предаварийных параметров установки в требуемую зону, после чего с пульта 27 управления подает в блок 29 индикации сигнал для квитирования световой и звуковой сигнализации.
На втором выходе блока 28 анализа параметров формируется код текущих значений технологических параметров процесса, пoctyпaющий в блок 30 сопряжения с ЭВМ. Последний выставляет сигнал запроса связи с ЭВМ.
Информация о теку1;;их значениях технологических параметров вводится в математическую модель процесса. ЭВМ сравнивает текущие параметры с npoi раммными и, если необходимо, выдает рекомендуемые значения уставок конт7928ролируемых параметров дальнейшего процесса бурения с учетом геологического строения скважины. Информация о рекомендуемых уставках технологических параметров поступает с выхода блока 30 сопряжения на четвертый вход кодера 19. На третий вход кодера 19 поступает адрес обслуживаемого КП, формируемый блоком 22 адресов. На пер вый и второй входы кодера 19 поступают формируемые блоком 23 синхронизации и управления соответственно тактирующие и служебные сигналы синхронизации и управления, по которым на кодер 19 последовательно поступают информационнее сигналы с блока 30 сопряжения и блока 22 адресов. В кодере 19 информации об уставках, подлежащих коррекции, и адреса КП кодируется. модулятором 20 преобразуется в после-20 ли
довательные частотные посылки, поступающие через передатчик 21 в канал 15 связи.
На контролируемом пункте (фиг. 1) информация в виде частотных посылок поступает из канала 15 связи через приемник 12 на вход демодулятора 13 приемного тракта КП, декодером Т преобразуется в параллельный девятизарядный код
Выделяемые декодером, синхронизирующие такты поступают в блок 8 синхронизации и управления и обеспечивают синхронную и синфазную работу аппаратуры КП и-ПУ. „
С первого выхода декодера 14 принятый код адреса КП поступает в блок
7адресов, где он сравнивается с кодом адреса, присвоенным данному КП. Если коды адресов не совпадают, блок
8синхронизации и управления по сигналу с блока 7 адресов запрещает прием информации с ПУ. При совпадении кодов адресов аппаратура,КП воспринимает остальную информацию, поступающую с третьего выхода декодера 14
на первый вход блока 3 коррекции уставок по трактирующим сигналам, поступающим с блока 8 синхронизации и
повышения точности устройства, в него на контролируемом пункте введен блок коррекции уставок контролируемых параметров и пульт ручного ввода информации, выход блока коррекции уставок соединен с третьим входом блока уставок контролируемых параметров, выход лока синхронизации и управления и третий выход декодера соединены соответственно с первым вторым входами лока коррекции уставок, выход пульта ручного ввода информации соединен с естым входом блока отбора новых данных, на пункте управления введен блок сопряжения с ЭВМ, выход которого соединен с четвертым входом, кодера, второй выход блока анализа параметров, третий выход пульта управления, третий выход блока синхронизации- и управления и второй выход блока адресов содинены соответственно с первым, вторым, третьим ичетвертым входами блока сопряжения с ЭВМ.
Источники информации, принятые во внимание при экспертизе
i
