(54) ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД


| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угловых перемещений вала в код | 1978 |
|
SU785882A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU866570A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU781866A1 |
| Преобразователь кода в угол поворота вала | 1980 |
|
SU942103A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU743002A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1580556A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1438000A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1783473A1 |
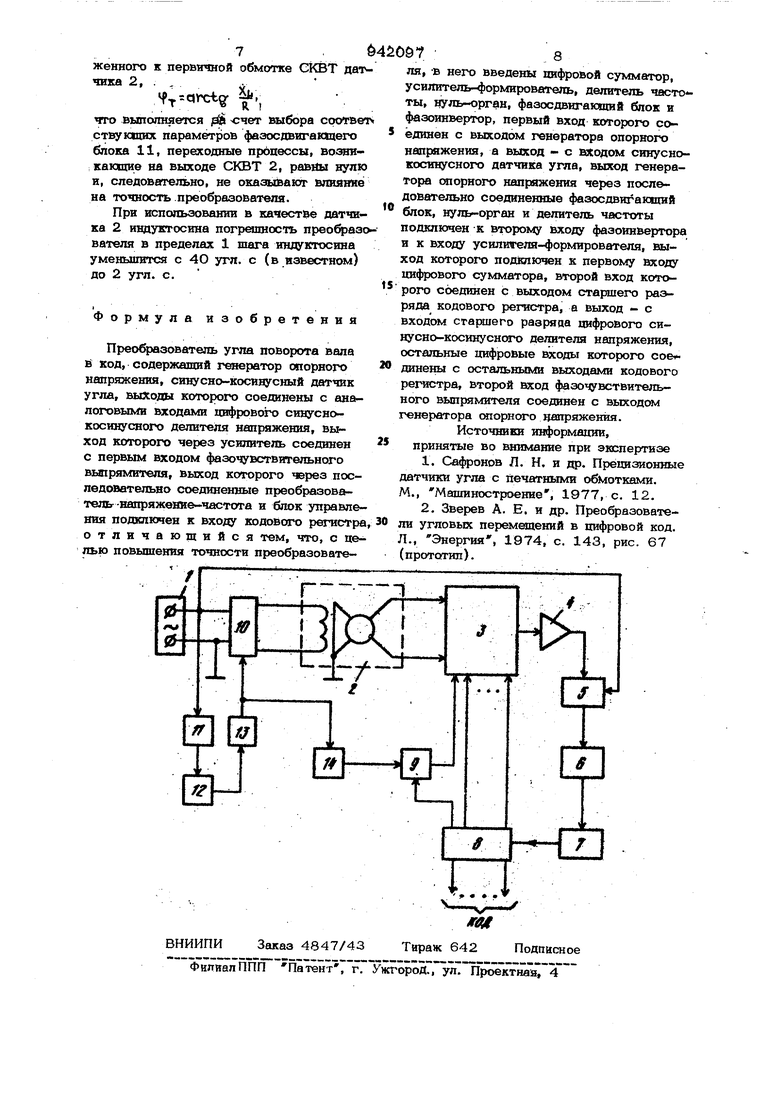
Изрфетение относится к автоматике и вычислительной технике и может быть использовано в устройствах, преобрагующих угловые перемещения вала в код. Известен преобразователь угла поворота вала в код, содержащий п ос ледовательно соединенные генератор опорного напряжения, многополюсный синусно-косинусный датчик угла, вьшолненный например, в виде индуктосина, двухполюсны синусно-косинусный приемник, усилитель фазочувствительный выпрямитель и блок формирования полезного сигнала, выполненный, например, в виде исполнительного двигателя и кодового датчика угла кинематически подключенных к валу синусно-косинусного датчика угла 1 . Достоинством этого преобразователя является высокая точность преобразования выходных сигналов датчика (индуктосина) в цифровой код, определяемая, главным образом погрешностью двухполюсного приемника. Однако, наличие в схеме этого преобразователя инерционного элемента-электродвигателя приводит к появлению большой погрешности преобразования в динамике. Наиболее близким к предлагаемому по техВДческой сущности является преобразователь угла поворота вала в код, содержащий последовательно включенные генератор опорного напряжения, синуснокосинусный датчик угла, выходы которого соединены с первым и вторым родами цифрового синусно-косинусного делителя напряжения, выход которого через,усилитель подключен ко входу фазочувствительгного выпрямителя, выход которого через блок управления соединен со входом кодового регистра f 23 Преимуществом этого преобразователя является высокая точность преобразования выходных сигналов датчика угла как в статике, так и в динамике,- малые габариты и вес, высокое бьютродействие. Однако для нормального функционирования этого преобразователя необходимо, чтобы выходные сигналы кшогополюсного СКВТ, используемого в качестве датчяка, поступающие на соответствующие входы цифрового синусно-косинусного делителя напряжения (ЦСКДН) имели достаточно большую по величине амплиту ду, значительно превышающую уровень паразитных сигналов (помех, шумов, остаточного напряжения,..,) возникающих на выходе ЦСКДН, следовательно, недостатком его является невысокая точиность. Цель изофетения - повышение точности преобразователя угла поворота вала в код путем уменьшения влияния пара зитных наводок на выходной код преобразователя. Поставленная цель достигается тем, что в преобразователь угла поворота вала в код, содержащий генератор опорного напряжения, синусно-косинусный датчик угла, выхода которого соединены с аналоговыми входами цифрового синуснокосинусного делителя напряжения, выход которого через усилитель соединен с пер вьп входом фазочувствительного вьшрям теля, выход которого через последовател но соединенные преобразователь напряжения - частота и блок управления подключен ко входу кодового регистра, введены цифровой сумматор, усилитель-формирователь, делитель частоты, нуль-орган, фазосдвигающий блок и фазоинвертор, первый вход которого соединен с вьгходо генератора опорного напряжения, а выход с входом синусно-косинусного датчика угла, выход генератора опорного напряже ния через последовательно соединенные фазосдвигаюпшй блок, нуль-орган и делитель частоты подключен ко второму входу фазоинвертора и к входу усилителя формирователя, выход которого подклю чен к первому входу цифрового сумматора, второй вход которого соединен с выходом старшего разряда кодового регист ра, .а выход - с входом старшего разряда цифрового синусно-косинусного делителя напряжения, остальные цифровые входы которого соединены с остальными выходами кодового регистра, второй вход фазочувствительного выпрямителя соединен с выходом генератора опорного напр жения . На чертеже приведена структурная схема преобразователя угла поворота вала в код. Преобразователь содердит генератор 1 опорного напряжения, синусно-косинус ный датчик 2 угла, цифровой синуснокосинусный делитель 3 напряжения (иСКДН), усилитель 4, фазочувствительный вьшрямитель 5, преобразователь 6 напряжение - частота, блок 7 управления, кодовый регистр 8, цифровой сумматор 9, одноразрядный фазоинвертор 1О, фазосдвигающий блок 11, нуль-орган 12, делитель 13 частоты, усилитель-формирователь 14. Преобразователь работает следующим образом. Выходное найряжение 0 ( генератора 1 с частотой (iJf, поступает на первый вход фазоинвертора Ю, выходное напряжение которого поступает на запитку перВйчной обмотки датчика 2. На второй вход фазоинвертора 10 поступают прямоугольные коммутирующие импульсы типа меандр с частотой Uj., где 1 2, 3,....Причем при нулевом уровне коммутирующих импульсов фаза вызюдного напряжения (}йзоинвертора 1.0 совпадает с фазой напряжения генератора 1, а при единичном уровне: коммутирующих импульсов фаза выходного напряжения фазоинвертора 10 скачкообразно изменяется на 180. Дгхя формирования коммутирующих импульсов выходное напряжение генератора 1 через фазосдвигающий блок 11 и нуль-орган 12 поступает на вход делителя 13 частоты. В делителе 13 прямоугольные импуттьсы нуль-органа 12,следукщие с .частотой , делятся по частоте в -i раз. При запитке первичной обмотки датчик 2 синусоидальным напряжением, модулированньпу скачкообразно О-180 по фазе, на выходных обмотках датчика 2 также индуктируются синусоидальные напряжения, скачкообразно модулированные по фазе, амплитуды которых изменя1ются в функции от измеряемого угла обо О законам синуса и косинуса, т.е. ,-Uo5iv,do, 0,--UoC05oto Выходные напряжения . и , датчика 2 поступакяг соответственно на первый (синусный) и второй (косинусный) входы ЦСКДН 3 который управляет кодом Р) К) - разрядного регистра 8. При нулевом уровне коммутирующих импульсов, образованных на выходе делителя 13 частоты, т.е. в интервале времени , гдоТ| - , на втором входе сумматора 9 появляется нулевой сигнал (так как сигнал на выходе усилителя-формирователя 14 равен нулю). При этом дискретный сигнал старшего разряца регистра 8, проходящий через сумматор 9, не изменяется по моду лю и выходной код регистра 8 проходит на цифровой вход ЦСКНД 3 без изменения. В этом случае выходное напряжение на выходе ЦСКНД 3 равно и -Ujj (sinel о сое |Ь -С05о(о 1 Р) 51V1 %t или после преобразований с учетом сигнала-помехи ОПОЛА К наведенной от генератора 1 в линии связи датчик 2 ЦСКДН 3 , W2-UoSi i(cio-)sinu;ot tJno) o P- noM«i F 6iwCuiot - рп) / где . UfjoM- амплитуда сигнала-помехи, наведенного в линии связи датчик 2 - ЦСКДН 3; ((- фаза сигнала помехи. ,vi (Ао-1)51м - -пипод,,siVI X ((() При единичном уровне коммутирующих импульсов, т.е. интервале времени TK фаза выходного напряжения физоинвертора 1О изменяется на 180°, и на втором входе сумматора 9 - единич. ный сигнал (так, как сигнал на выходе усилителя-формирователя 14 равен единице). При этом дискретный сигнал старшег разряда регистра 8 изменяется по модулю на единицу. В результате код, поступаклций на цифровой вход ИСКДН 3, отличается от кода регистра 8 на единиц старшего разряда, т.е. по углу - на 1ВО В этом случае выходное напряжение ЦСКДН 3 равно о -Ор АУкКрСо ср - ео )-cosc. lp tfeo ; xSih(4;ot-Heo; или после преобразований с учетом сиг нала помехи Uo-ib).iviu;ot -ЦиподдСОб ((p - вO;J ъли(шо1 + V U UQ6ivi(do-p)Siviti;ot-bY5Ut, (|b-«-4&)sin(u;ot+4noM}(2) Выходное напряжение иСКДН 3, представленное уравнениями (1) и (2), поступает через усилитель 4 на вход фазо- чувствительного выпрямителя 5, на второй вход которого поступает опорное напряжение UQJ, (t) с выхода генератора. При постоянной времени Тф фазочувствительного выпрямителя 5, равной ( . сигнал на выходе фазо огвствительного выпрямителя 5 равен сумме амплитуд переменных напряжений, представленных уравнениями (1) и (2), т.е. (46 o &HV2UnoM a) (|bM59-Vl4ioM (P+4f7 или %Ч6 - фмв5((3) Этот сигнал, пропор1шональнь1й разности между измеряемым углом и кодом PJ регистра 8, поступает через преобразователь 6 напряжение - частота в блок 7 управления, на выходе которого формируется управляющий сигнал, изменяющий код регистра 8 в сторону уменьшения сигнала рассогласования (3). При нулевом выходном сигнале фазочувствительного вьшрямителя 5 преобразователь 6 и блок 7 управления отключаются, при этом как следа ет из (3) выходной код регистра 8 равен измеряемому углу об без учета погрешностей, , обусловленных сигналом-помехой ) . наведенным от генератора 1 в линии связи датчик 2 - ЦСКДН 3. Настоящий пример приведен для случая применения в качестве датчика 2 индукгосина. В том случае, если в качестве датчика 2 используется СКВТ с большой постоянной времени i например, типа ВТ-5, то на точность р ассматри- ваемого преобразователя отрицательное влияние оказывают переходные процессы, возникакдцие на выходе оСмоток СКВТ датчика 2, вследствие скачкообразного изменения фазы напряжения фазоинверто- ра Ю. Для исключения переходных процессов в преобразователе введен фазосдвигакяяий блок 11, который сдвигает входное напряжение нуль-органа 12 по фазе относительно выходного напряжения генер атора 1 на угол Цфр. Благодаря этому происходит пропорциональное смещение начальной фазы коммутационных импульсов, которая определяет момент скачкообразного изменения фазы выходного напряжения фазоинвертора 1О. При ЛЧфБ тгде ft- фазовый сдвиг между вектором тока, проходящего через первичную обмотку СКВТ датчика 2 в установившемся режиме, и вектором напряжения, прило
