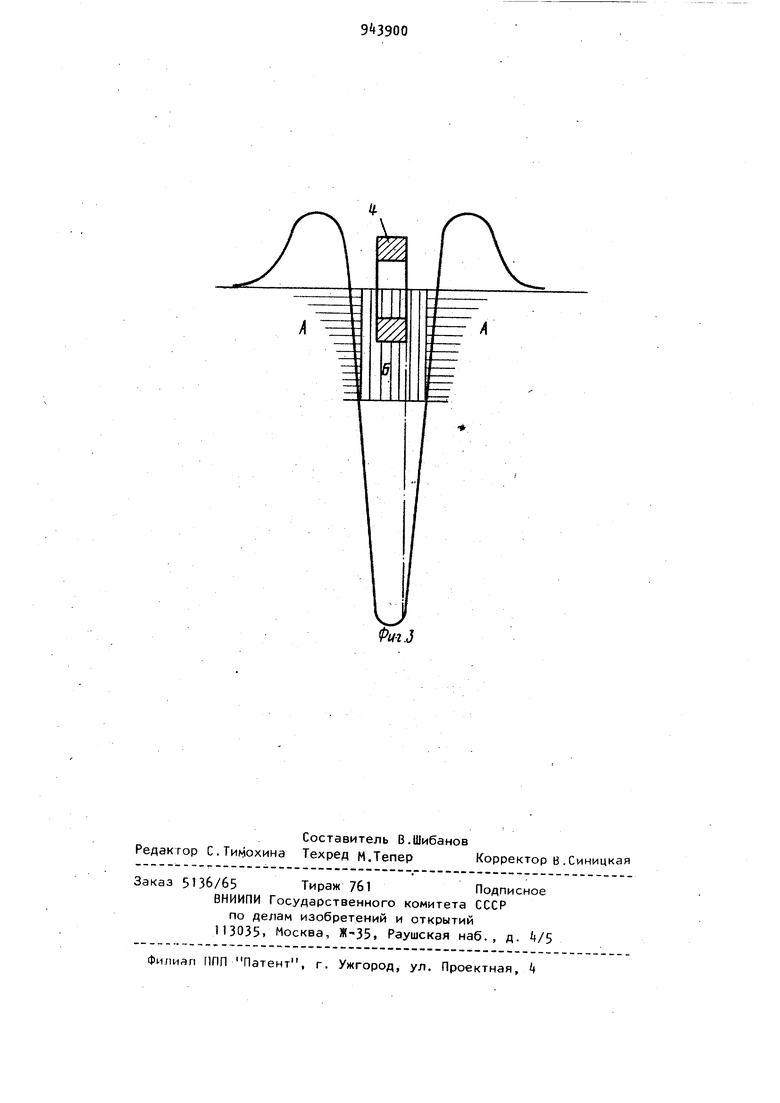
Изобретение о: носится к контрольно-измерительной технике и, будучи использовано в датчике положения, служит для контроля положения объекта, например ленточного конвейера, в шахтах, опасных по газу или пыли, обеспечивая выдачу аварийного сигнала в систему дистанционного или авто матизированного управления. Известно коммутационное устройство датчика положения с гибким приводом, выполненное в виде микропереключателя . Однако в условиях работы шахтной аппаратуры надежность такогЬ коммутационного устройства недостаточна. Известно также коммутационное устройство датчика положения с гибки приводом, содержащее установленные в корпусе геркон, постоянный магнит, установленный с возможностью перемещения вдоль оси геркона, шток с возвратной пружиной, установленный с возможностью воздействия на постоянный магнит, с одного его торца в направлении оси геркона. В магнитную систему известного коммутационного устройства введены также цилиндрический ферромагнитный экран специальной конструкции и соединяющая его с постоянным магнитом немагнитная втулка 2. Однако известное коммутационное устройство относительно сложно, так как магнитная система представляет собой сборочный узел, состоящий из трех деталей. Все три детали и образованный иа них узел должны иметь строго выдержанные размеры, так как в противном случае зона срабатывания геркона будет произвольно смещена. Искажение геометрии магнитной системы может происходить при изготовлении коммутационного устройства и его эксплуатации, так как магнитная система в процессе работы претерпевает постоянные механические нагрузки. При наладке выключателя, а также 3Э периодически в эксплуатации для устранения возникающих отказов необходимо производить регулировку положения магнитной системы. Наличие сложной магнитной системы требующей регулировки в эксплуатации снижает надежность коммутационного устройства, что, в свою очередь,отражается на контролируемом им объекте, в данном случае на работоспособности шахтных конвейеров. Кроме того в известном коммутационном устройстве не исключена возможность поломки магнитной системы при предельных изгибах гибкого привода датчика. Целью изобретения является повышение надежности и упрощение констру ции коммутационного устройства для датчика положения с гибким приводом. Поставленная цель.достигается тем что коммутационное устройство снабже но подпорной пружиной магнита, установленной с противоположного по отношению к возвратной пружине штока торца постоянного магнита вплотную к нему и имеющей жесткость, меньшую жесткости возвратной пружины штока, постоянный магнит установлен свободно относительно штока, в корпусе на участке расположения возвратной пружины штока выполнен кольцевой выступ ограничивающий ход магнита зоной изменения коммутационного состояния герконй. На фиг. 1 схематически изображен датчик положения с предлагаемым коммутационным устройством, разрез, на фиг. 2 - схема работы гибкого привода и коммутационного устройства; на фиг. 3 зоны замкнутого и разомкнутого состояния геркона. Коммутационное устройство датчика положения содержит корпус 1, в котором расположены капсула с герконом 2, закрепленная в перегородке 3, постоянный магнит k, подпорная пРУ I жина 5 магнита и кольцевой ограничитель 6. Гибкий привод датчика, защищенный резиновой трубкой 7 от попадания в корпус 1 пыли и влаги, состоит из пластмассовых шайб 8, нанизанных на трос 9, и возвратной пружины 10. Верхний конец троса 9 жестко закреплен во втулке 11, а нижний - в штоке 12. Вводная камера 13 корпуса 1 образована крышкой 14 с кабельным вводом 15В исходном состоянии (фиг. 1) магнит k прижат подпорной пружиной 5 магнита (которая намного слабее возвратной пружины 10 штока) к торцу штока 12. Под действием контролируемого объекта (в частности ленты шахтного конвейера) гибкий привод может изгибаться 8 любую сторону,вызывая осевое перемещение штока 12 (фиг. 2) вдоль капсулы герконом 2, причем величина хода штока 12 позволяет изогнуть гибкий привод на достаточно большой угол. При изгибе гибкого привода магнит Ц перемещается аверх вдоль геркона 2 под дейртвием подпорной пружины магнита 5 и при дальнейшем подъеме штока 12 фиксируется кольцевым ограничителем 6 независимо от дальнейшего перемещения штока 12, чем исключается поломка коммутационного устройства. Расстояние, которое проходит магнит до ограничителя 6, соответствует угловой величине изгиба гибкого привода, устанавливаемой в зависимости от условий эксплуатации контролируемого объекта. На фиг. 3 показаны две зоны А магнита k, 6 которых язычки геркона.ра зомкнуты, и зона Б, в которой они замкнуты. Капсула с герконом 3 заранее устанавливается относительно кольцевого выступа 6 таким образом, чтобы в момент остановки магнита ограни-, чителем 6 язычки геркона попали в зону Б или в зону А - в зависимости от необходимости. Предлагаемая, конструкция датчика имеет более простую магнитную систему обеспечивая высокую точность переключения геркона, не требует регулировки положения магнита, более надежна в эксплуатации. Формула изобретения Коммутационное устройство для датчика положения с гибким приводом, содержащее установленные в корпусе геркон, постоянный магнит, установленный с возможностью перемещения вдоль оси геркона, шток с возвратной пружиной, установленный с возможностью воздействия на постоянный магнит с одного его торца в направлении оси геркона, отличающееся тем, что,с целью повышения надежности и упрощения конструкции, оно снабжено подпорной пружиной постоянного магнита, установленной с противоположного по отношению к возвратной пружине штока торца магнита, вплотную к нему и имеющей жесткость, меньшую жесткости возвратной пружины штока, постоянный магнит установлен свободно относительно штока, а в корпусе на участке расположения возвратной пружины штока выполнен кольцевой выступ, ограни Ф9 06 чивающий ход постоянного магнита зоной изменения коммутационного состояния геркона. Источники информации, принятые во внимание при экспертизе 1.Выключатель с гибким приводом. Материал выставки Уголь-75,Донецк, 1975. 2.Авторское свидетельство СССР ff 317121, кл. Н 01 Н 19/02, 1968.

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛЯРИЗОВАННЫЙ ГЕРКОН И ПОЛЯРИЗОВАННОЕ КОММУТАЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2474000C1 |
| Датчик контроля разделения объектов | 1988 |
|
SU1610517A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ МАССИВА ГОРНЫХ ПОРОД | 2000 |
|
RU2193658C2 |
| ПИСТОЛЕТ-РАСПЫЛИТЕЛЬ ДЛЯ МОЕЧНОГО АППАРАТА ВЫСОКОГО ДАВЛЕНИЯ | 2015 |
|
RU2676978C2 |
| НАСОС С ТЕПЛОВЫМ ПРИВОДОМ | 1991 |
|
RU2027958C1 |
| КОМПЛЕКТ ДЛЯ ДЕМОНСТРАЦИИ ЗАКОНОВ МЕХАНИКИ (ВАРИАНТЫ), МАГНИТНЫЙ ГЕРКОНОВЫЙ ДАТЧИК И ПРИСПОСОБЛЕНИЕ ДЛЯ ОПРЕДЕЛЕНИЯ МГНОВЕННОЙ СКОРОСТИ ТЕЛА, БРОШЕННОГО ГОРИЗОНТАЛЬНО | 2011 |
|
RU2460146C1 |
| УСТРОЙСТВО ДЛЯ СИГНАЛИЗАЦИИ О ВСКРЫТИИ ОБЪЕКТА | 2004 |
|
RU2280898C2 |
| СИГНАЛИЗАТОР КОНЕЧНЫХ ПОЛОЖЕНИЙ ЗАПОРНОГО ОРГАНА | 1995 |
|
RU2098708C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ДЕФОРМАЦИЙ ПОРОД КРОВЛИ | 2010 |
|
RU2424431C1 |
| Реверсивный магнитный переключатель | 1990 |
|
SU1775050A3 |