Изобретение относится к измерительной технике, а точнее, к устройствам, предназначенным для измерения угловой скорости вращения, и может быть использовано, например, в системах стабилизации скорости вра1цения бесконтактиых двигателей постоянного тсжа (БДПТ) с широтно-импульснымн датчиками положения ротора (ДРП), а также в системах автоматического управления для выработки импульсных тахометрических сигналов.
Известны бесконтактные реверсивные техогенераторы постоянного тока, содержащие синхронный генератор переменного тока, ротор которого жестко соединен с датчиком положения ротора, выпрямитель, фазочувствительный блок, реверсивный блок, связанный электрически с датчиком положения ротора, пркчем реверсивный блок выполнен на герконах, переключгиоцие :)бмотки которых соединены с выходом аэочувствительного блока 1.
Недостатками зтих тахогенераторой являются координатное запаздывание момента переключения реверсивного блока отиосительно момента времени реверса вращения вала генератора/
;а также сложность, заключающаяся в налнчии электромеханнческого блока.
Известно также устройство для измерения скорости вращения бесконтактного двигателя постоянного тсжа, содержит двухфазный широтноимпульсный датчнк положения, первый выход которого через первый формирователь соединен с первым входом
10 схемы ИЛИ, второй вход которой через второй формирователь подключен к второму выходу датчщса положения, а -выхоя - к первому входу схемы совпадения, второй вход которой соединен
15 через последовательно соединенные одновибрат.ор, третий формирователь и инвертор с первым выходом датчика положения, а выход - с первым входам триггера, второй вход которого
20 подослючен к выходу третьего формирователя, а выход - к первому входу компаратора и к входу схемы задержки, выход которого соединен с вторьм входом компараторга (2 .
25
Недостатк(м«( устройства является его сложность (наличие шести чувствительных элементов, т.е. удвоенного их комплекта) и связанное с зтим большое число электрических проводои
30 между датчиком и электоонн1 1 блоком.
Цель изобретения - упрощение конструкции за счет сокращения числа чувствительных элементов и уменьшени числа электрических связей между электромеханической частью и электроHbff-i блоком.
Поставленная цель достигается тем, что в бесконтактный тахогенератор введены три интегратора, два сумматора и два формирователя, причем первый выход-датчика положения через последовательно соединенные первый интегратор, первый cvMMaTop и четвертый формирователь подключен к третьему входу схемы ИЛИ., четвертый вход которой через последовательно соеди ненные пятый формирователь, второй сумматор и второй интегратор подключен к второму входу датчика-положения, при этом второй вход первого сумматора соединен с первьм входом второго сумматора, второй вход которого через третий интегратор подключен к выходу инвертора.
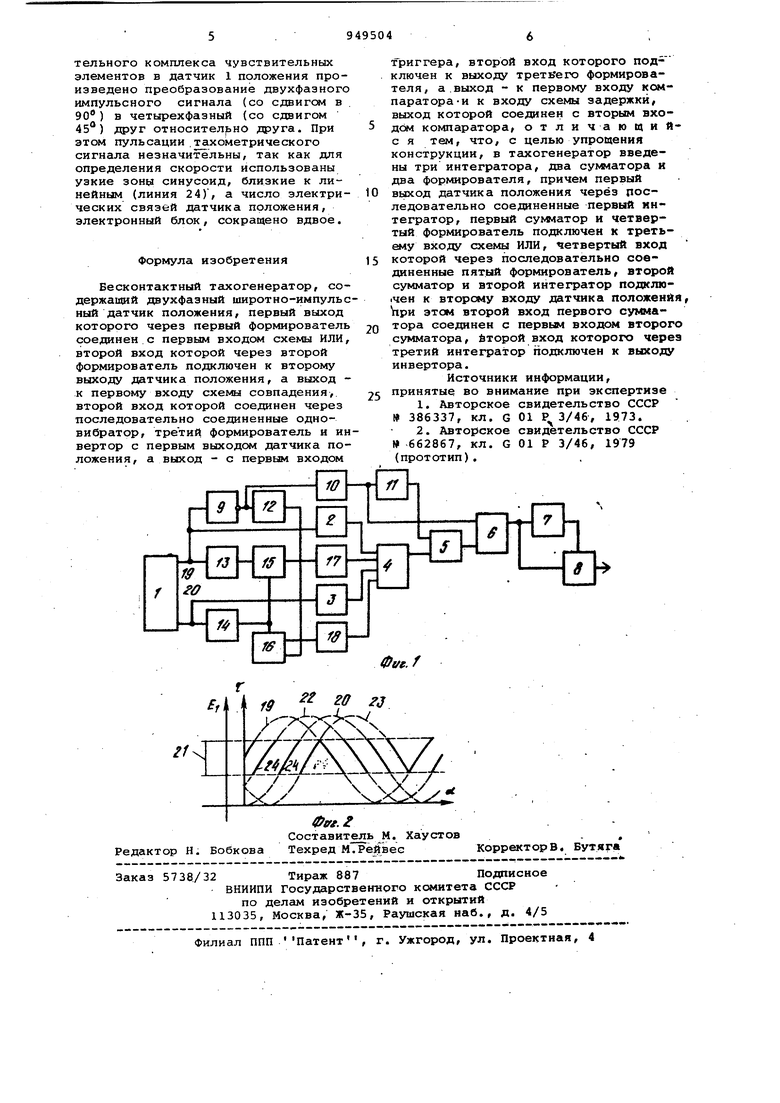
На фиг.1 изображена функциональна схема устройства; на фиг.2 - эпюры сигналов, поясняющие принцип работь устройства.
Бесконтактный тахогенератор содержит двухфазный широтноимпульсный датчик 1 положения, два выхода которого через последовательно соединенные формирователи 2 и 3, схему ИЛИ 4, схему 5 совпадения, триггер 6, схему 7 задержки соединены с первым входом компаратора 8, на второй вход которого подключен выход триггера 6. Устройство содержит последовательно подключенные к первому входу датчика положения инвертор 9, третий формирователь 10,вьаход которого соединен с- вторым входом триггера б, и одновибратор 11, выход которого соединен с вторым входом схемы 5 совпадения. Тахогенератор содержит три интегратора 12 - 14, два сумматора 15 и- 16 и два формирователя 17 и 18. Выходы датчика 1 положения через последовательно соединенные цепи, состоящие из первого 13 и второго 14 интеграторов, перво17О 15 и второго 16 сумматоров и четвертого 17 и пятого 18 формирователей соединены с входами сборки 4. К второму входу первого сумматора 15 подключен второй выход интегратора 14, а к второму входу второго сумматора 16 через третий интегратор 12 подключен выход инвертора.9.
Устройство работает следующим образом.
При поворот.е вала датчика 1 положения с его выходов поступают широтно-импульсные сигналы 19 и 20, законы изменения длительности которых от угла об (19 и 20, фиг.2) сдвинуты по фазе между собой на 90 . При реализации тахометрического
устройства по этим законам получаются значительные пульсации выходных сигналов. В устройстве расщепление фаз достигается в электронном блоке, с помощью введения дополнительного оборудования - блоков 12 - 1В.
Сигнал с первого выхода датчика 1 инвертируется инвертором 9 и через формирователь 10 запускает одновибратор 11, выходной импульс 21 которого является разрешающим для схемы 5 совпадения. Импульс 21 расположен посредине периода широтно-импульсной модуляции..
Длительность сигнала 21 Соответствует протяженности участков синусоид 19, 20, 22 и 23, близких к линейным. Причем синусоиды 19 и 20 с датчика 1 поступают на формирователи 2 и 3, выходные короткие импульсы которых соответствуют положению в периоде Т информационного фронта ШИМ Сигналы 19 и 20 интегрируются первым и вторым интеграторами 13 и 14, а сигнал 19 инвертируется блоком 9, а затем также интегрируется третьим интегратором 12. Таким образом, к концу каждого периода на выходах трех интеграторов получаются напряжения, соответствующие длительностям сигналов 19, 20 и 19.
В сумматоре 15 происходит сложени сигналов 19 и 20, а формирователь 17 вырабатывает короткий импульс, расположение которого в периоде Т соответствует закону 22. Аналогично, в сумматоре 16 складываются сигналы 19 и 20, а формирователь 18 вырабатывает сигнал 23.
На схему сборки поступают четыре последовательности коротких импульсо с выходов формирователей 2, 3, 17 и 18, относительное положение которых (импульсов) в периоде Т ШИМ соответствует законам 19, 20. 22 и 23.
Импульсы с выхода схемы ИЛИ 4 поступают на схему 5 совпадения, котора пропускает на один вход-триггера 6 .сигнал с выхода сборки лишь во вреся существования импульса 21 выхода одновибратора. Итак, триггер по сигналам двух фронтов ШИМ: фиксированного - с выхода формирователя .10 и информационного - с выхода схемы 5 совпадения формирует ШИМ сигнал 24, закон изменения длительности которого показан сплошной линией (фиг.2).
Выходные импульсы триггера 6 поступают на один вход компаратора 8 через схему 7 задержки, а на второй - непосредственно. На выходе компаратора 8 появляется сигнал, длительность которого пропорциональна скорости вращения вала датчика 1 положения.
Таким образом, в предлагаемом устройстве вместо установкидополнительного комплекса чувствительных элементов в датчик 1 положения произведено преобразование двухфазного импульсного сигнала (со сдвигом в 90) в четырехфазный (со сдвигом 45 ) друг относительно друга. При этом пульсации.тахометрического сигнала незначительны, так как для определения скорости использованы узкие вони синусоид, близкие к линейным (линия 24), а число электрических связей датчика положения, электронный блок, сокращено вдвое,
Формула изобретения
Бесконтактный тахогенератор, содержащий двухфазный широтно-импульсный датчик положения, первый выход которого через первый формирователь соединен с первым входом схемы ИЛИ, второй вход которой через второй формирователь подключен к второму выходу датчика положения, а выход к первому входу схемы совпадения, второй вход которой соединен через последовательно соединенные одновибратор, третий формирователь и инвертор с первым выходом датчика положения, а выход - с первым входом
триггера, второй вход которого под- ключен к выходу третьего формирователя, а вь1ход - к первому входу компаратора-и к входу схемы задержки, выход которой соединен с вторым входом компаратора, отличающийс я тем, что, с целью упрощения конструкции, в тахогенератор введены три интегратора, два сумматора и два формирователя, причем первый
0 вькод датчика положения через последовательно соединенные первый интегратор, первый суютатор и четвертый формирователь подключен к третьему входу схемы ИЛИ, четвертый вход
5 которой через последовательно соединенные пятый формирователь, второй сумматор и второй интегратор подклю.чен к второму входу датчика положения, Ъри этом второй вход первого сумматора соединен с первьм входом второго сумматора, бторой вход которого через третий интегратор подключен к выходу инвертора.
Источники информации,
5 принятые во внимание при экспертизе
1.Авторское свидетельство СССР 386337, кл. G 01 , 1973.
2.Авторское свидетельство СССР 662867, кл. G 01 Р 3/46, 1979 (прототип).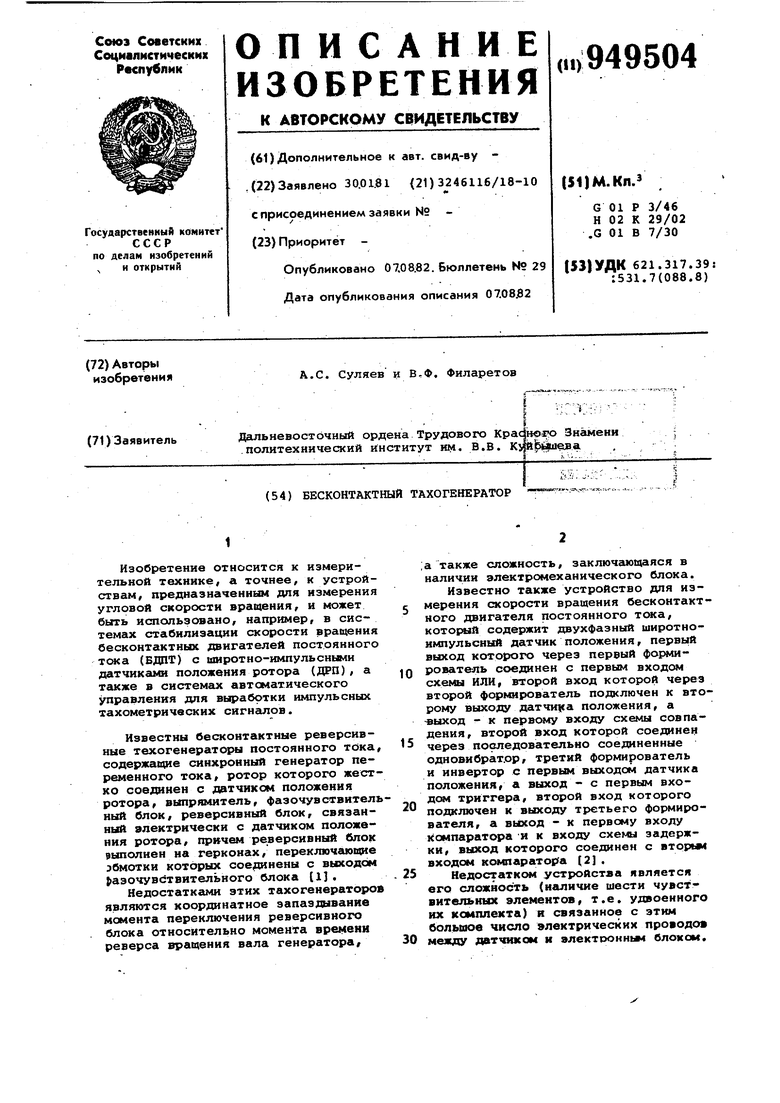

| название | год | авторы | номер документа |
|---|---|---|---|
| Тахогенератор вентильного электродвигателя | 1981 |
|
SU966597A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| Вентильный электродвигатель | 1986 |
|
SU1390763A1 |
| Преобразователь постоянного напряжения | 1987 |
|
SU1525835A1 |
| Система управления | 1983 |
|
SU1168896A1 |
| Широтно-импульсный регулятор для управления вентильным преобразователем | 1983 |
|
SU1181074A1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА | 2004 |
|
RU2280226C1 |
| Магнитомодуляционный преобразователь угла | 1984 |
|
SU1234721A1 |
| Способ управления инвертором | 1988 |
|
SU1661936A1 |
| Электропривод переменного тока | 1989 |
|
SU1757041A1 |
