С54) ПРЕОБРАЗОВАТЕЛЬ КОДА В УГЛОВОЕ ПОЛОЖЕНИЕ
ВАЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1983 |
|
SU1095213A1 |
| Преобразователь кода в угол поворота вала | 1981 |
|
SU1001142A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1446691A2 |
| Преобразователь угла поворота вала в код | 1979 |
|
SU898482A1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1540003A2 |
| Преобразователь кода в угловое положение вала | 1983 |
|
SU1088048A1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1236610A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1120386A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1280699A1 |
| Фазовая следящая система | 1981 |
|
SU954926A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для связи ЦВМ с объектом управления.
Известны преобразователи кода в угол поворота вёша, содержащие регистр, подключенный через блок преобразования кода в напряжение к функциональному преобразователю нап-; ряжений, выход которого подключен к элементу сравнения, к другому входу элемента сравнения подключены выходы сельсина, а выход элемента сравнения через усилитель подключен к двигателю, кинематически связанному с ротором сельсина
Недостатком данных преобразователей являются значительные погрешности преобразования.
Известны преобразователи, содержащие управляемЕлй генератор частоты, блок питания, подключенный к фазовращателю, выход которого подключен к одному входу сервосистемы, другой вход которой соединен с выходом управляемого делителя частоты, а вал фазовращателя кинематически связан с валом сервосистема 2.
Наиболее близким к предлагаемому является преобразователь кода в
угол поворота вала, содержащий генератор импульсов, выход которого подключен к делителю частоты и блоку преобразования кода в сдвиг фазы, блок питания, перш и второй выходы которого подключены к фазовращателю,выходы фазовращателя подключены к одним входам первого и второго фазовых детекторов, выходы которых через после10довательно соединенные сумматор и усилитель подключены к двигателю,кинематически соединенному с валом фазовращателя .Выходы блока преобразования кода в сдвиг фазы подключены к дру15 .гим входам первого и второго фазовых детекторов, а выходы делителя частоты подключены к блоку питания
Сз.
Недостатком известного преобра20зователя является наличие динамической погрешности.
Цель изобретения - повьаяение динамической точности преобразователя.
Поставленная цель достигается
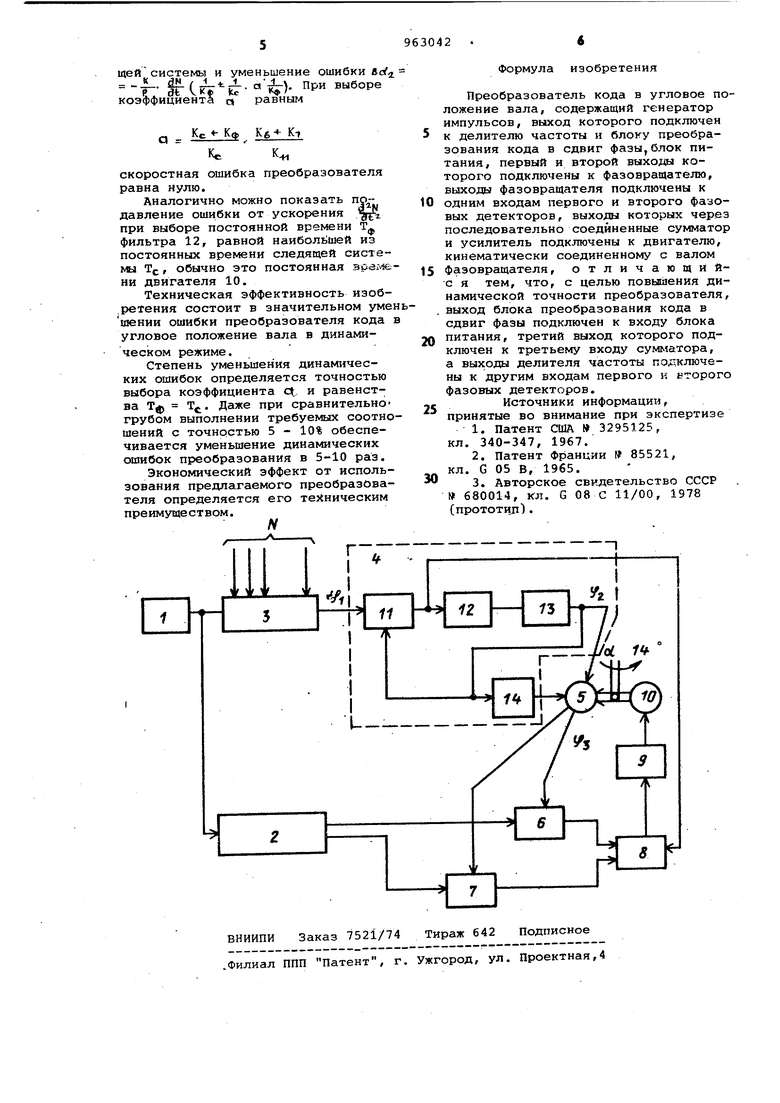
25 тем, что в преобразователь кода в угловое положение вала, содержащий генератор импульсов, выход которого подключен к делителю частоты и блоку преобразования кода в сдвиг фазы,
30 блок питания, первый и второй выходы которого подключены к фазовращателю, выходы фазовращателя подключены к одним входам первого и второ го фазовых детекторов, выходы которых через последовательно соединенные сумматор и усилитель подключены к двигателю, кинематически соединен ному с валом фазовращателя, выход блока преобразования кода в сдвиг фазы подключен к входу блока питания, третий выход которого подключен к третьему входу сумматора, а выходы делителя частоты подключены к другим входам первого и второго фазовых детекторов. Блок-схема преобразователя представлена на чертеже. Преобразователь содержит генератор 1 импульсов, подключенный к дели телю 2 частоты и блоку 3 преобразования кода в сдвиг фазы. Выход блок 3. подключен к двухфазному блоку 4 п тания, первый и второй выходы которого подключены к фазовращателю 5, выходы фазовращателя 5 подключены к одним входам фазовых детекторов 6 и 7, другие входы которых соединены с выходами делителя 2 частоты, а выходы через последовательно соедине иные сумматор 8 и усилитель 9 подключены к двигателю 10, кинемати чески соединенному с валом фазовращателя 5. Блок 4 питания состоит из последовательно соединенных фазо вого детектора 11, один вход которо го соединен с входом блока 4, фильт pa 12 нижних частот и управляемого генератора 13, выход которого подк чен к другому входу фазового детектора 11, первому выходу блока 4 и через фазосдвигающий блок 14 к вто,рому выходу блока 4 питания. Выход фазового детектора 11, являющийся третьим выходом блока 4, подключен к третьему входу сумматора 8. Преобразователь работает следующим образом. Частота импульсов генератора 1 понижается в счетчике 2, и на его выходе вырабатываются два квадратур ных опорных сигнала прямоугольной формы. В блоке 3 частота импульсов генератора 1 понижается в такое же число раз, но фаза У f-- N выходного сигнала блока 3 отличаетс от опорной на величину,, пропорциональную входному коду N преобразова теля кода в угловое положение вала (здесь fo - фаза опорного сигнала, k - коэффициент преобразования кода в фазу). Соединенные в кольцо фазовый детектор 11, фильтр 12 и управляемый генератор 13 синусоидального напряжения образуют систему фазовой автоподстройки (ФАП), вырабатывающую напряжение возбуждения фазовращателя 5, которого соответст вует фазе «f выходного сигнала преобразователя 3. Квадратурное напряение и возбуждения фазовращатея 5 образуется сдвигом напряжения и по Фазе на угол li/2 в фазосдвигающем блоке 14. Выходные напряжения фазовращателя 5 смещены по фазе относительно напряжения возбуждения на угол, пропорциональный угловому положению dL вала фазовращателя 5, т. е. .f i/a.+ pct(P - коэффициент электрической редукции фазовращателя 5). Фазовые детекторы 6 и 7 сравнивают фазы выходных напряжений фазовращателя 5 с фазами f опорных сигналов, поступающих с делителя 2. Выходные напряжения детекторов, пропорциональные разности фаз Л tf - Vo этих сигналов, суммируются в сумматоре 8 { при этом обеспечивается компенсация погрешностей, обусловленных неравенством коэффициентов передачи и неортогональнрстью обмоток фазовращателя) и через усилитель 9 управляют двигателем 10, сводя разность фаз &V к нулю. В установившемся состоянии Vt Ч fo - kN, Р Vo - kN р, A«f Pot. - KN 0, следовательно, (i,. При изменении кода N во времени с постоянной скоростью с1ИЩфаза (| выходного напряжения управляемого генератора 13 отстает от фазы 4 выходного сигнала блока 3 на величину где Кф - коэффициент усиления разомк. нутбго контура блока 4. Тогда фаза V равна f Vo -KN Фазовая следящая система, образованная блокс1ми 5 10, также имеет скоростную ошибку - - где Kg - коэффициент усиления разомкнутого контура этой следящей системы. Без дополнительной связи детектора 11 и сумматора 8 динамическая ошибка Ав/ц преобразования кода в угловое положение вгша равна ,.К.. dN 1. 1. dt К, При включении дополнительной связи выходное напряжение детектора 11, пропорциональное АНа f вводится с коэффициентом а в сумматор 8, обеспечивая смещение фазозвой следя
