(5) ЕМКОСТНОЙ ТРАНСФОРМАТОРНЫЙ МОСТ ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Емкостный трансформаторный мост для измерения перемещений | 1985 |
|
SU1259100A1 |
| Емкостный трансформаторный мост для измерения перемещений | 1985 |
|
SU1293470A1 |
| Емкостной измеритель перемещений | 1980 |
|
SU1037050A1 |
| Емкостной измеритель перемещений | 1980 |
|
SU1037052A1 |
| Емкостный трансформаторный мост для измерения перемещений | 1978 |
|
SU676860A1 |
| Емкостный измеритель перемещения | 1985 |
|
SU1252653A1 |
| Цифровой трансформаторный мост переменного тока | 1987 |
|
SU1451606A1 |
| Цифровой автоматический безмодуляционный экстремальный мост переменного тока | 1975 |
|
SU551569A2 |
| ЦИФРОВОЙ АВТОМАТИЧЕСКИЙ ЭКСТРЕМАЛЬНЫЙ МОСТ ПЕРЕМЕи!т10ГО ТОКА | 1972 |
|
SU346677A1 |
| Емкостный измеритель перемещений | 1988 |
|
SU1562676A1 |
1
Изобретение относится к измерительной технике, а именно к измерению перемещений с помощью дифференциальных емкостных преобразователей.
Известны устройства для измерения перемещений при помощи емкостных дифференциальных преобразователейII3.
Недостаток устройств закл эчается в большой погрешности измерения, обусловленной неидеальностью характерис-jQ тик преобразователя.
Наиболее близким по технической сущности к предлагаемому является емкостной трансформаторный мост для измерения перемещений, содержащий ,5 трансформатор напряжения, коммутатор, компаратрр токов, дифференциальный емкостной преобразователь перемещений с переменной активной площадью с токовым электродом, разделенным на 20 механически жестко связанные между со бой секции, подключенные через коммутатор к компаратору токов, и блок уравновешивания 23.
Недостаток известного устройства заключается в большой динамической погрешности измерения.
Цель изобретения - уменьшение динамической погрешности.
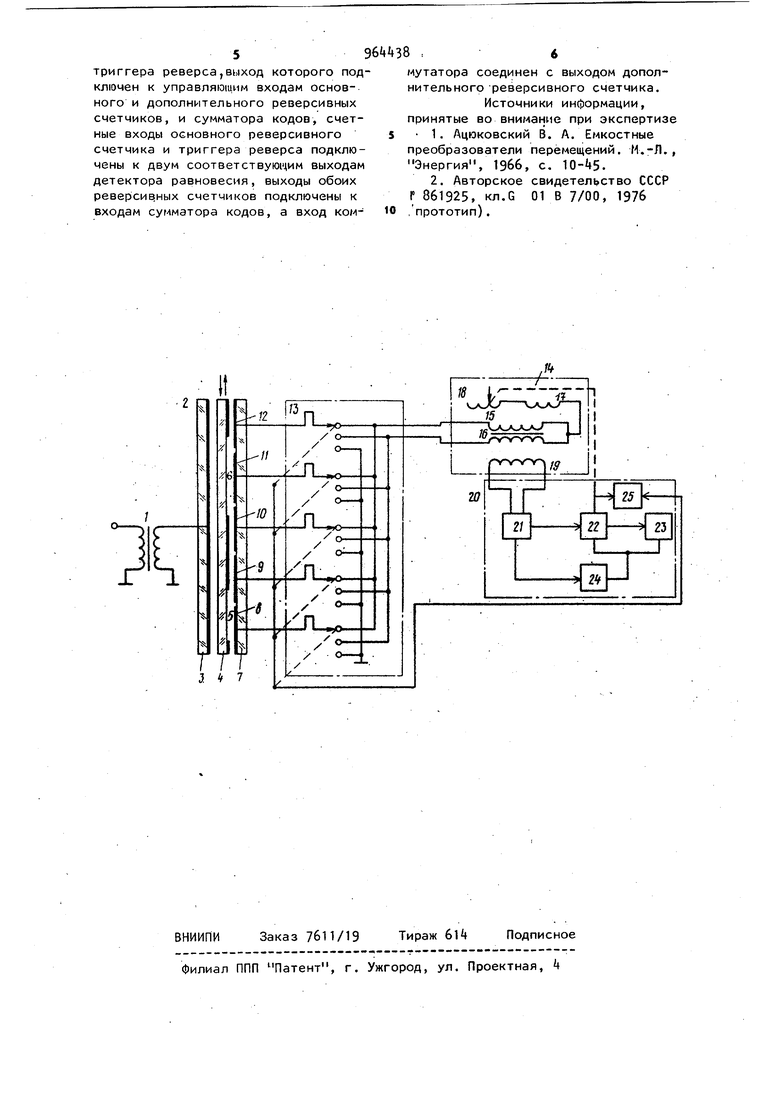
Поставленная цель достигается тем, что блок уравновешивания выполнен в виде детектора равновесия, подключенного к компаратору токов, последовательно включенных основного и дополнительного реверсивных счетчиков, триггера реверса, выход которого подключен к управляющим входам основного и дополнительного ре.версивных счетчиков, и сумматора кодов, счетные входы основного реверсивного счетчика и триггера реверса подключены к двум соответствующим выходам детектора равновесия, выходы обоих реверсивных счетчиков подключены к входам сумматора кодов, а вход коммутатора соединен с выходом дополнительного реверсивного счетчика. На чертеже представлена принципиальная схема емкостного трансфор аторного моста для измерения перемещений. Мост содержит трансформатор 1 на пряжения, дифференциальный емкостной преобразователь 2 перемещений с переменной активной площадью,сост ящий из потенциального электрода 3, подключенного к трансформатору напряжения, экранирующего электрода k с окнами 5 и 6 и токового электрода 7с секциями 8-12.коммутатор 13, ко паратор 1 токов с дифференциальными обмотками 15 и 16, подключенными через коммутатор 13 X секциям; 8-12 токового электрода 7, последователь но включенными регулируемой обмоткой 17 смещения и регулируемой обмоткой 18 и указательной обмоткой 19- Для уменьшения динамической погрешности измерения блок 20 уравно;вешивания моста включает детектор 2 равновесия, основной и дополнительные реверсивные счетчики 22 и 23, триггер 2k реверса и сумматор 25 кодов. Прибор работает следующим образо При перемещении подвижного экранирующего электрода 4 между неподвижными электродами 3 и 7 преобразователя 2 изменяются активные площади секций токового электрода 7 находящихся в данный момент под окнами 5 или 6 подвижного электрода k Какая-либо одна из пар секций токового электрода 7 при помощи коммутатора 13 подключена к дифференциальным обмоткам 15 и 1б компаратора 14 токов. Возникающий в компараторе Ik магнитный поток компенсируется регулировкой числа витков регулируемой обмотки 18. Если число витков указанной обмотки в процессе уравновешивания достигло предельного значения (нуля или максимума, то производится переключение коммутато ра 13 в следующее состояние и измерительная цепь доуравновешивается. Процесс уравновешивания измерительной цепи и работа блока 20 ура новешивания заключается в следующем Пусть измерительная цепь находится в некотором произвольном начальном состоянии. Детектор 21 равно весия анализирует состояние мостовой измерительной цепи, определяет необходимое направление изменения числа витков обмотки 18, устанавливает триггер 2k реверса в необходимое состояние, а затем подает импульсы на счетный вход основного реверсивного счетчика 22, управляющего .ч ислом витков обмотки 18 до тех пор, пока не будет достигнуто состояние равновесия измерительной цепи. Если на данной паре смежных секций токового электрода 7 равновесие не может быт,ь достигнуто ( число витков регулируемой обмотки 18, а также число, занесенное в основной реверсивный счетчик 22, достигло максимума или нуля), то импульс переноса основного реверсивного счетчика 22 поступает на .счётный вход дополнительного реверсивного счетчика 23, который изменяет состояние коммутатора 13 и под- ключает к компаратору 14 токов следующую пару смежных секций токового электрода 7. В точке равновесия измерительной цепи детектор равновесия не подает импульсы на реверсивные счетчики. По состоянию основного и дополнительного реверсивных счетчиков 22 и 23 можно однозначно определить измеряемое перемещение,, для чего выходные сигналы реверсивных счетчиков 22 и 23 суммируются при помощи сумматора 25 кодов. Если скорость изменения измеряемого перемещения не превышает скорости слежения прибора, то дополнительная динамическая погрешность, измерения отсутствует. Это позволяет построить высокоточный прибор для измерения изменяющихся перемещений. Формула изобретения Емкостной трансформаторный мост для измерения перемещений, содержащий трансформатор напряжения, коммутатор, компаратор токов, дифференциальный емкостной преобразователь перемещений с переменной активной площадью с токовым электродом, разделенным на механически жестко связанные между собой секции, подключенные через коммутатор к компаратору токов, и блок уравновешивания, о т лича.ющийся тем, что, с целью уменьшения динамической погрешности, блок уравновешивания выполнен в виде детектора равновесия, подключенного к компаратору, токов ,последовательно включенных основного и дополнительного реверсивных счетчиковтриггера реверса,выход которого подключен к управляющим входам основного и дополнительного реверсивных счетчиков, и сумматора кодов, счетные входы основного реверсивного счетчика и триггера реверса подключены к двум соответствующим выходам детектора равновесия, выходы обоих реверсив.ных счетчиков подключены к входам сумматора кодов, а вход коммутатора соединен с выходом дополнительного реверсивного счетчика.
Источники информации, принятые во внимание при экспертизе
/прототип). i 7
