(54) ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УСКОРЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезоэлектрический преобразо-ВАТЕль уСКОРЕНий | 1977 |
|
SU794539A1 |
| Пьезоэлектрический преобразователь ускорения | 1982 |
|
SU1040423A1 |
| Устройство для измерения ускорения | 1977 |
|
SU717663A1 |
| Пьезоэлектрический измерительный преобразователь ускорения | 1980 |
|
SU928233A1 |
| Пьезоэлектрический датчик давления | 1983 |
|
SU1270593A1 |
| Пьезоэлектрический акселерометр | 1981 |
|
SU1007022A1 |
| Пьезоэлектрический акселерометр | 1973 |
|
SU477348A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2400760C1 |
| Пьезоэлектрический акселерометр | 1981 |
|
SU1015311A1 |
| Датчик механических величин | 2019 |
|
RU2725203C1 |
1
Изобретение относится к взмерителм ной технике и может быть использовано, в частности, для измерения ударных ускорений, усилий, давлений и других физ1ь ческнх величин
Р вестен пьезоэлектрический преобразователь ускорения, состоящий из корпуса инерционного тела, пьезоэлектрическо--; го элемента. Пьезоэлектрический элемент иыеет электроды для снятия генерируемы : зарядов, причем эти электроды приклеены и, следовательно, жестко связань с ко{ пусом и инерционным .элементом l.
Известен пьезопреобразователь ускорения, состояш } из таких же элементов, пьезоэлектрический элемент которого таюке жестко связан с инерпж шшм телом и корпусом и имеет электроды для снятия оарядов на свободных поверхноотях, не связанных с другими элементами 2о преобразователя 2.
Недостатком указанных преобразователей является наличие в конструкции жесткой механической связи между пьезоэлементом и корпусом преобразователя, что сопряжено с повышенной чувствительностью таких преобразователей к неиз- меряемой деформации корпуса преобразс -, вателя и объекта измерения.
Наиболее близким к изобретению является пьезоэлектрический преобразователь ускорения, который состоит из раоположенного в корпусе инерционного тела и пьезоэлемента, припаянного к корпусу и инерционному телу СЗ .
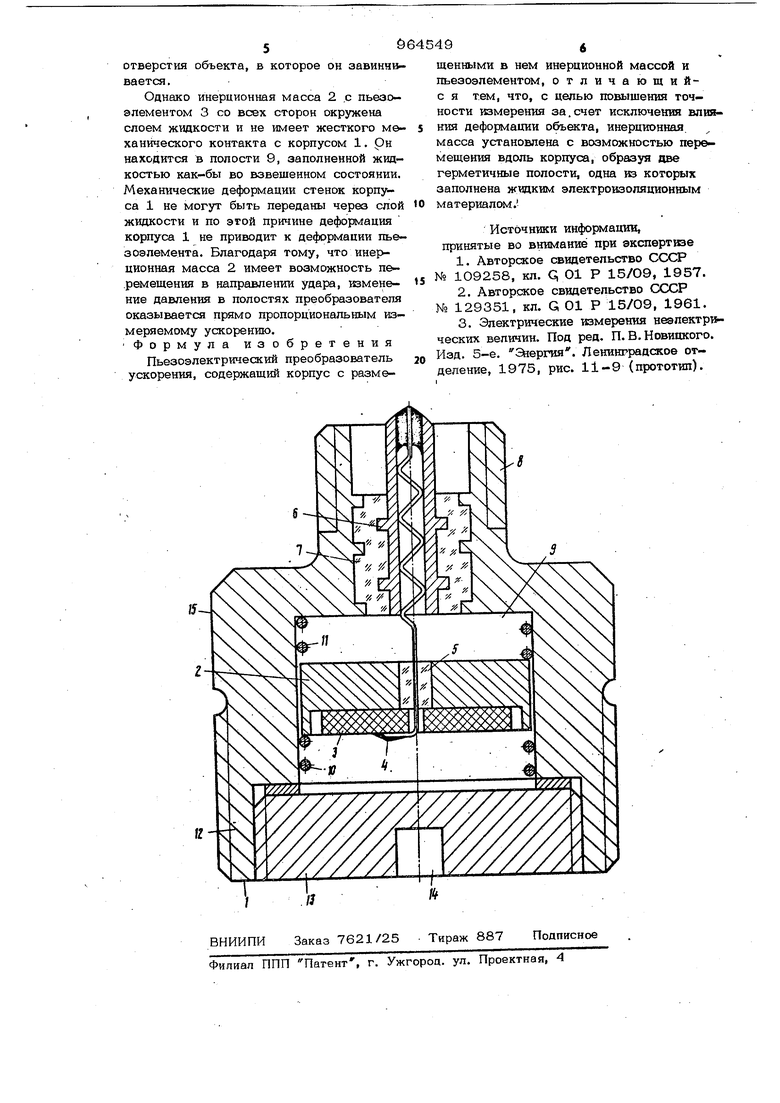
Недостатком известной конструкции является сравнительно низкая точность измерения ускорений. Низкая точность пьезоакселерометров такого типа обусло&лена наличием жесткой механической свяаи между пьезоэлементом и корпусом преобразователя, вследствие чего n|ie3i преобразователи ускорения оказываются весьма чувствительными к воздействию , нeизмepя0vlыx деформаций объекта, всеЬха присутствующих при юмерении ускорения. В преобразователе ускорения измеряемое ускорение в конечном счете также прео&39разуется в деформацгао пьезоэлемента, вы аываалую воздействием инерционного тела на пьезоэлемент. Поэтому чувствитеп ность пьезоакселерометра к деформации бывает весьма труднр устранить. В ряде случаев влияние изгиба иви растяжения сжатия поверхности объекта, на которой закрепляется преобразователь ускорения, оказывается преавалирующим, и тогда выходной сигнал преобразователя рпределяется не сколько воздействующим ускорением поверхности , сколько изменением ее геометрии и размеров. Целью изобретения является повышение точности измерения ускорений за счет исключения влияния деформации объекта. Поставленная цель достигается тем, что инерционная масса установлена с возможностью перемещения вдоль корпуса, образуя две герм.етичные полости, одна из которых заполнена жидким электроизоляционным материалом. На чертеже показана конструкция предлагаемого преобразователя ускорения В; преобразователе в корпусе 1 раоположены инерционная масса 2 и пьезоэлемент 3. Пьезоэлемент 3 выполнен из пнроэлектрика и находится в расточке инерционной массы 2 и приклеен к нему. .Пьезоэлемент 3 поляризован по оси симметрии акселерометра и имеет на торцевых поверхностях электроды, причем верхний электрод приклеен к инер ционной массе 2, а нижний электрод свободен. К нижнему электроду припаян провод 4, -изолированный от инерционного тела втулкой 5 и связанный посредством пайки со штырем электрического разъема, образованного деталями 6 и 7 и резьбовым выступом 8 корпуса 1. Ине ционная масса 2 расположена в централь ной части полости 9 корпуса 1, что обео печивается с помощью двух спиральных пружин 10 и 11, находящихся в состоянии предварительного поджатия. Одновременно с помощью этих пружин осуществляется электрическая связь между верхним электродом пьезоэлв 1ента 3 и корпусом 1 преобразователя. Пространст во между корпусом и инерционным телом как между торцами инерционной мас сы, так и между цилиндрической поверхностью инерционной массы и корпусом, заполнено конденсаторным маслом (не показано), С помощью прокладки 12 и пробки 13 обеспечивается герметичность полости О. Пробка 13 имеет щлиц 14 9 ДЛЯ завинчивания пробки 13 в корпусе 1, а корпус 1 имеет шлицы на наружной поверхности 15 для завинчивания преобразователя в объекте измерения. При завинчивании пробки 13 в полости 9 преобразователя создается некоторое начальное давление. Перед измерением пре образователь завинчивают в резьбовое отверстие, предварительно изготовленное в объекте измерения, ось которого расположена в направлении измеряемого ускорения. К разъему преобразователя привинчивают электрический кабель для связи с вторичндэй измерительной аппаратурой. Пьезоэлектрический преобразователь ускорения работает следующим образом. В первом приближении можно считать, что при удэре все элементы объекта и преобразователя испытывают инерционные усилия, пропорциональные действующему ускорению, и если изменяется ускорение, то и инерционные усилия изменяются пропорционально ускорению. Пусть для определенности ускорение направле:. от пробки 13 к разъему преобразователя, тогда инерционное усилие, действующее на инерционное тело, направлено в сторону пробки 13, Под действием этого усилия инерционная масса 2, имея слабую упругую связь с корпусом 1 посредством пружин 10 и 11, щ. еодолевая их сопротивление, перемещается вштз, сжимая жидкость, расположенную в нижней части полости 9. При перемещении инерционной массы 2 происходит некоторое увеличение давления в нижней части полости 9 и соответствующее уменьшение давления в верхней части полости 9. При изменении направления ускорения знаки приращений давления изменяются на противоположные. Изменение давления жидкости, приложенное к пьезоэлементу 3, вызывает появление на его обкладке зарядов, пропорциональных измеряемому ускорению. Электрические заряды вызывают появление электрического напряжения на электродах пьезоэлемента 3. Это напряжение по проводу 4 через инерционную массу 2 и пружины 10 и Г1 поступает на разъем преобразователя и далее через соединительный кабель во вторичную аппаратуру для преобразования и регистрации. Возникающая при ударе деформация объекта измерения передается на корпус 1 преобразователя, который жестко связан с объектом и подвержен по этой причине изменению размеров и геометрии
