Изобретение относится к системам автоматического контроля и преобразования параметров движения, а именно к преобразователям угловых параметров движения вала в электрический сигнал.
Известен многоотборный преобразователь угловых перемещений, содержащий цилиндрические коаксиальные магнитопроводы с размещенными между ними неподвижными обмоткайи,- навиваемые обмотки, неи атываемые на неподвижный магнитопровод, и подвижной кольцевой магнитопровод. Подвижные концы секций навиваемой обмотки соединены между собой через отверстие в подвижном магнитопЕюводе l.
Наиболее близким по техническому решению к данному является преобразователь угловых параметров движения вала в электрический .сигнал, содержащий коаксиально расположенные цилиндрические магнитопроводы и подвижное ферромагнитное кольцо, расположенное между секциями внешнего цилиндрического Магнитопровода, на неподвижных магнитопроводах расположены двухсекционная измерительная обмотка, обмотки возбуждения и компенсационные обмотки, причем измерительная
обмотка выполнена из токопроводящей пружины, дифференциально навитой на неподвижный внутренний цилиндрический магнитопровод, в подвижном магнитопроводе, выполненном в виде кольца, закреплены соединенные вместе концы измерительной обмотки 2j.
Недостаток таких преобразователей
10 состоит в невозможности использования их для измерения нескольких параметров движения вала, например уг- i ловых перемещений и скоростей.
Цель изобретения - расширение функциональных возможностей преобра15зователя, заключающихся в возможности измерения угловых перемещений и скоростей.
Поставленная цель достигается за счет того, что в преобразователь
20 угловых параметров движения вала в электрический сигнал, содержащий два цилиндрических коаксиально расположенных Магнитопровода, подвижное ферромагнитное кольцо, расположенное
25 между секциями внешнего цилиндрического Магнитопровода, внутри которого размещены обмотки возбуждения, на внутреннем цилиндрическом магнитопроводё размещены компенсационная
30 обмотка и две секции измерительной
обмотки, выполненной в виде токопроЕодяцих спиралей, одни концы которых закреплены на внутреннем цилиндрическом магкитопроводе, другие концы токопроводящих спиралей закреплены на подвижном ферромагнитном кольце, введены электропроводящий полый цилиндр и П-образный магнитопровод с постоянным магнитом в основании электропроводящий полый цилиндр жестко соединен с подвижным ферромагнитным кольцом и охватывает внешний цилиндрический магнитопровод, П-образный магнитопровод связан с валом преобразователя, и его стержни распо ложены с внешней стороны электропроводящего полого цилиндра.
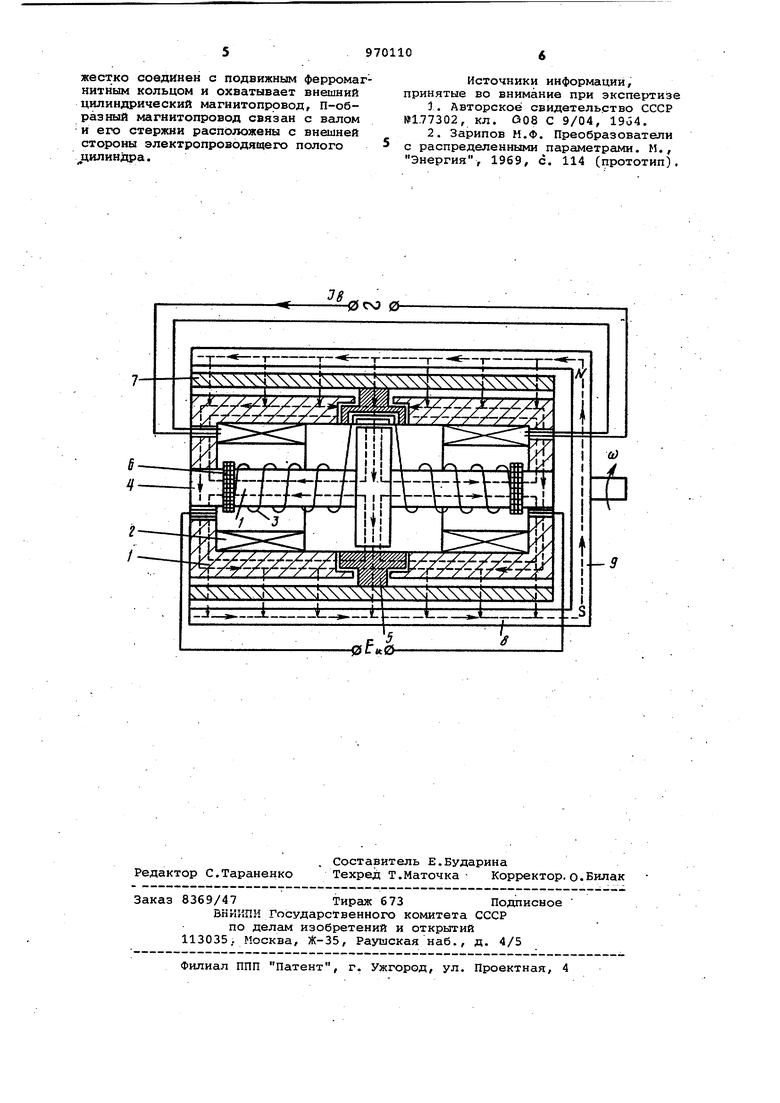
На чертеже схематически изображен преобразователь, обский вид в . разрезе.
Преобразователь угловых параметров движения вала в электрический сигнал содержит два цилиндрических коаксиально расположенных магнитопровода 1 с размещенными межд: ними обмотками 2 возбуждения, измеритель™ ными обмотками 3, выполненныгли из .токопроводящей пружины, наматываемой на неподвижный магнитопровод 4, подвижное ферромагнитноекольцо 5 и
компенсационные обмотки б. С одной стороны концы секций измеритешьной обмотки 3 жестко соединены мегжду собой через отверстие в кольце 5, с. друхой - выведены наружу через неподвижный магнитопровод 1, Обмотки
б включены последовательно и встреч™
но с секциями измерительной.обмотки 3 и служат для компенсации началь- ного значения ЭДС.
К подвижному ферромагнитному кольцу 5 жестко крепится с внешней стороны соосно с ним электропроводящий полый цилиндр 7, охваченный с внешней стороны вдоль образующих П-образным магнйтопроводом 8 с постоянным магнитом 9, в основании жестко соединенным с валом.
Кроме того, обмотки 2 возбуждения включены последовательно и встречно, и созданный ими поток, замыкаясь через среднюю часть магнитопровода 4, индуктируют ЭДС одновременно в обеих секциях измерительной обмотки 3 .
Преобразователь работает следующим образом.
При вращении с контролируемой скоростью ои П-образного магнитопровода. 8 силовые линии потока, созданные постоянным магнитом 9 между стержнями П-образного магнитопровода 8 и BHeiiJHHM магнйтопроводом 1 преобразователя, пересекают в тангенциальном направлении электропро-
водящий полый цилиндр 7 и ИНД5ГКТИруют в нем ЭДС, пропорциональную
скорости вращения П-образного магнитопровода БЗ V( Ток, созданный этой ЭДС, взаимодействуя с индукцией между П-образным магнйтопроводом 8 и внешним маг штопроводом.1 преобразователя, создает вращающий, момент , воздействукщий на электропроводящий полый цилиндр 7 и пропорциональньдй скорости вращения Mgp . Вращающий момент поворачивает подвижную часть преобразователя до тех пор, пока не компенсируется противодействующим моментом упругих витков измерительной обмотки Мрр . Угол поворота
подвижнойчасти при этом пропорционален вращающеглу моменту
d.
и угло:вой скорости вращеа значит, ния
KS,
oL-w.
Ki
ЭДС на выходе прербразователя пропорциональна углу поворота Е а следовательно, и угловой скорости
E K, ,
о
При необходимости преобразования углового перемещенияс, а не угловой скорости, цилиндр 7 жестко крепится к П-образному магнитопроводу 8. Экономическая эффективность от
использования предлагаемого технического решения обусловлена отмеченными выше его техническими преимуществами.
Формула изобретения
Преобразователь угловых параметров движения вала в электрический
сигнал, содержащий два цилиндрических коаксиально расположенных -магнитопровода, подвижное ферромагнитное кольцо, расположенное меязду секциями внешнего цилиндрического магнитопровода, внутри которого .размещены обмотки возбуждения, на внутреннем цилиндрическом магнитопроводе размещены компенсационная обмотка и две секции измерительной обмотки, выполненной в виде токопроводящих спиралей, одни концы которых закреплены на внутреннем цилиндрическом магнитопроводе, другие концы токопроводящих спиралей закреплены на подвижном ферромагнитном кольце, о тл и ч а ю щ и и с я тем, что, с целью расширения функциональных возможностей, в него введены электропроводящий полый цилиндр и П-образный магнитопровод с постоянным магнитом в основаНИИ, электропроводящий полый цилиндр
жестко соединен с подвижным ферромагнитным кольцом и охватывает внешний цилиндрический магнитопррвод, П-образный магнитопровод связан с валом и его стержни расположены с внешней стороны электропроводящего полого лдилиндра.
Источники информации, принятые во внимание при эксперти:зе
1.Авторское свидетельство СССР №1.77302, кл. G08 С 9/04, 1964.
2.Зарипов Н.Ф. Преобразователи с распределенными параметрами. М., Энергия, 1969, с. 114 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БИФАКТОРНОГО ВОЗБУЖДЕНИЯ ФЕРРОЗОНДОВ И УСТРОЙСТВО МОДУЛЯТОРА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2809738C1 |
| Устройство для дефектоскопии сплошности электропроводящих материалов | 1983 |
|
SU1130791A1 |
| Электрическая машина | 1990 |
|
SU1794271A3 |
| Преобразователь линейных перемещений | 1979 |
|
SU934200A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ БОЛЬШИХ УГЛОВЫХ И МАЛЫХ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2062975C1 |
| Преобразователь для измерения линейных и угловых перемещений | 1989 |
|
SU1679176A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ МАЛЫХ ЛИНЕЙНЫХ ПЕРЕЛ1Еи1,ЕНИЙ | 1968 |
|
SU220773A1 |
| Магнитошумовой преобразователь | 1990 |
|
SU1793354A1 |
| Бесконтактный датчик крутящего момента | 1977 |
|
SU708181A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
