(Б ) МАГНИТОМОДУЛЯЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитомодуляционный преобразователь перемещения | 1972 |
|
SU459663A1 |
| Преобразователь угла поворота вала в код | 1981 |
|
SU966720A1 |
| Преобразователь для бесконтактной передачи сигналов постоянного тока с вращающегося объекта | 1981 |
|
SU1017927A1 |
| Дифференциальный индуктивный преобразователь перемещений | 1980 |
|
SU937991A1 |
| СПОСОБ БИФАКТОРНОГО ВОЗБУЖДЕНИЯ ФЕРРОЗОНДОВ И УСТРОЙСТВО МОДУЛЯТОРА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2809738C1 |
| Датчик тока | 1982 |
|
SU1112296A1 |
| ЭЛЕКТРИЧЕСКИЙ УПРАВЛЯЕМЫЙ ПОДМАГНИЧИВАНИЕМ ТРЕХФАЗНЫЙ РЕАКТОР | 1998 |
|
RU2132581C1 |
| МАГНИТОМОДУЛЯЦИОННЫЙ ИНДУКТИВНЫЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2023235C1 |
| Стабилизатор постоянного регулируемого тока | 1983 |
|
SU1112353A1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ | 1970 |
|
SU269742A1 |
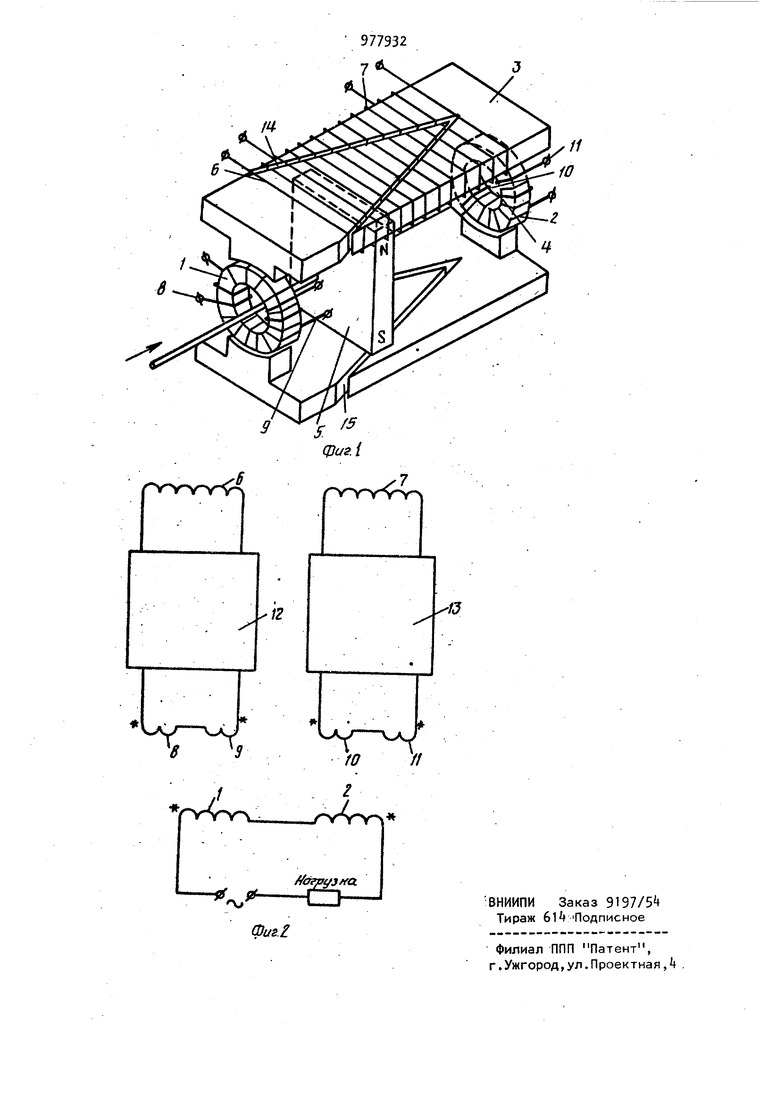
Изобретение относится к измерительной технике и может быть испольд зёвано в устройствах автоматического регулирования, управления, измерения и контроля неэлектрических величин электрическими методами в металлургической, химической, нефтехимической, приборостроительной, машиностроительной отраслях промышленности По осно.вному авт. св. f 59663 известен магнитомодуляционный преобразователь перемещения, содержащий два дросселя насыщения с магнитопроводами, подвижный постоянный магнит, .С-образный магнитопровод с зазором Q его основании, в котором расположен один из дросселей насыщения, и с разрезами V-образной формы в направлении перемещения постоянного маг нита на параллельных пластинах . -образно.го магнитопровода, причем второй дроссель насыщения рарположен соосно первому между концами параллельных пластин магнитопровода, при ЭТОМ оба дросселя насыщения и постоянный магнит охвачены -образным магнитопроводом Cl. Недостатком известного преобразователя является сравнительно низкая точность из-за большой динамической погрешности, вызванной большой постоянной времени дросселей насыщения, в результате которой ЭДС, наводимая в обмотках дросселей насыщения, отстает от изменения магнитного потока постоянного магнита, вследствие чего возникает амплитудная динамическая погрешность большая, чем больше скорость подвижного элемента. Цель изобретения. - повышение точности за счет уменьшения динамической погрешности преобразователя. Поставленная цель достигается тем, что магнитомодуляционный преобразователь перемещения снабжен двумя обмотками коррекции, дьумя схемами согласования и двумя двухсекционными обмотками подмагничивания, выход каждой обмотки коррекции подключен через схему согласования к двухсекционной обмотке подмагничивания, на каждом дросселе насыщения расположе,.но по одной двухсекционной обмотке насыщения, секции каждой из которых расположены диаметрально противоположно и соединены последовательновстречно, обмотки коррекции расположены на участке разреза V-образной формы. На фиг. 1 показана конструкция преобразователя; на фиг. 2 - схемы коммутации обмоток преобразователя. Ма гнитомодуляционный преобразователь перемещения содержит два дрос селя 1 и 2 насыщения, С -образный маг нитопровод 3, между концами параллельных пластин которого расположен дроссель 1 насыщения, причем в основании магнитопровода 3 выполнен зазор , в котором размещен второй дроссель 2 насыщения соосно с первым подвижный постоянный магнит 5 разме щенный между параллельными плас.тина.ми магнитопровода 3 и выполненный с возможностью перемещения вдоль них, две обмотки 6 и 7 коррекции на магнитопроводе 3, две двухсекционные обмотки из секций 8 и 9 10 и 11 год магиичивания, расположенные на дросселях 1 и 2, и две схемы 12 и 13 согласования . Секции 8 и 9 одной обмотки подмаг ничивания намотаны на дроссель 1 наЪыщения, а секции 10 и 11 второй обмотки подмагничивания намотаны на дроссель 2 насыщения; причем секции 8 и 9, 10 и 11 кaждoJ i обмотки подмаг ничивания расположены диаметрально на участке дросселей 1 и 2 насыщения соответственно, не прилегающих к параллельным пластинам магнитопровода 3, и соединены последовательновстречно. На параллельных пластинах магнитопровода 3 выполнены разрезы 1A и 1 V-образной формы, которыми параллель ные пластины магнитопровода 3 разбиты каждая на клинообразный и W-образный участки. Обмотка 6 коррекции намотана на клинообразный участок од ной из параллельных пластин магнитопровода 3, а вторая обмотка 7 коррек ции - на ее W-образный участок. Дрос сель 1 насыщения расположен со сторо ны оснований клинообразных участков параллельных пластин магнитопровода 3Обмотка 6 коррекции через схему 12 согласования соединена с обмоткой подмагничивания (секциями 8 и 9). Обмотка 7 коррекции соединена через схему 13 согласования с обмоткой подмагничивания (секциями 10 и 11). Обмотки дросселей 1 и 2 насыщения соединены последовательно-.встречно и имеют клеммы для подключения нагрузки и источника переменного тока (не показано) . . Схемы 12 и 13 согласования могут ыть выполнены в виде операционных силителей с однополярным выходом. Постоянный магнит 5 служит для создания магнитного потока. Магнитопроводы дросселей 1 и 2 насыщения, и Mai- нитопроводЗ предназначены для создания пути магнитного потока. Обмотки дросселей 1 и 2 насыщения служат для создания рабочего магнитного потока и для снятия с них выходного сигнала. Разрезы It и 15 V-образной формой на параллельных пластинах магнитопровода 3 служат для перераспределения магнитного потока при перемещении постоянного магнита 5 и позволяют исключить погрешность от поперечного смещения магнита 5. Обмотки 6 и 7 коррекции служат для коррекции динамической погрешности измерения перемещения путем создания в них ЭДС, пропорциональной скорости перемещения постоянного магнита 5. Секции 8-11 обмоток подмагничивания предназначены для коррекции динамической погрешности измерения перемещения путем дополнительного подмагничивания магнитопровода. Схемы 12 и 13 согласования предназначены для усиления (согласования по амплитуде) сигнала коррекции и для создания выходного сигнала одной полярности, не зависящей от направления перемещения постоянного магнита 5Магнитомодуляционный преобразователь перемещения работает следующим образом. При подключении обмоток дросселей 1 и 2 насыщения к источнику переменного тока (не показан) в магнитопро-. воде, состоящем из I--образного магнитопровода 3 и магнитопроводов дросселей 1 и 2 насыщения, создается переменный рабочий магнитный поток Фре,б Постоянный магнит 5 создает магнитный поток ф, который делится на две части: Ф|л МБ магнитный поток, проходящий по клинообразным участкам параллельных пластин магнитопровода 3 слева от магнита 5, пронизывающий витки обмотки 6 коррекции, и по дросселю 1 насыщения, и Ф,л.пр магнитный поток, проходящий по W-образным участкам параллельных пластин магнитопровода 3 справа от магнита 5 пронизывающий витки обмотки 7 коррекции, и по дросселю 2 насыщения. При перемещении постоянного магнита 5 из среднего полохчения магнитные потоки Ф, проходя ПО магнитопроводам дросселей 1 и 2 насыщения соответственно, изменяют степень их насыщения пропорционально перемещению постоянного магнита 5 из среднего положения, за счет чего изменяется индуктивность каждой обмотки дросселей 1 и 2 насыщения. При изменении индуктивности обмоток дрос селей 1 и 2 насыщения изменяется пол ное сопротивление в цепи нагрузки, в результате чего ток в цепи нагрузки изменяется пропорционально перемещению постоянного магнита 5 из среднего положения. При перемещении постоянного магни та 5 с какой-то скоростью в обмотках 6 и 7 коррекции наводятся ЭДС {E,p ) величина которых зависит от скорости перемещения постоянного магнита 5По магнитопроводам дросселей 1 и насыщения проходят суммарные потоки мв пр соответственно (поток по стоянного магнита и поток подмагничивания}, изменяя степень насыщения дросселей 1 и 2 пропорционально пере мещению х и скорости V постоянного магнита 5. за счет чего изменяется индуктивность каждой обмотки дросселей 1 и 2 насыщения. В результате эт го изменяется полное сопротивление в цепи нагрузки и, следовательно, ток в цепи нагрузки пропорционально пере мещению X и скорости V постоянного магнита 5. За счет создания потока подмагиичивания ток в нагрузке увеличивается при увеличении скорости V магнита 5 в результате чего происходит компенсация амплитудной динамической погрешности измерения перемещения. Предлагаемый магнитомодуляционный преобразователь перемещения позволяет уменьшить динамическую погрешность по сравнению с известным, что повышает точность измерений. С обмоток коррекции можно также снимать сигнал, пропорциональный скорости перемещения подвижного элемента, что расширяет функциональные возможности преобразователя . Формула изобретения Магнитомодуляционный преобразователь перемещения по авт. св. № 59663, отличающийся тем, что, с целью повышения точности за счет уменьшения динамической погрешности, он снабжен двумя обмотками коррекции, двумя схемами согласования и двумя двухсекционными обмотками подмагничивания, выход каждой обмотки коррекции подключен через схему согласования к двухсекционной обмотке подмагничивания, на каждом дросселе насыщения ра.сположено по одной двухсекционной обмотке насыщения, секции из которых расположены диаметрально противоположно и соединены порледовательно-встречно, обмотки коррекции расположены на участке разреза V-образной формы. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 59663, кл. G 01 В 7/10, 1975.
