(54) ФИЛЬТР ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 2003 |
|
RU2276796C2 |
| Преобразователь напряжение - ток | 1987 |
|
SU1472834A1 |
| Устройство для обработки импульсных сигналов | 1983 |
|
SU1142900A1 |
| СПОСОБ ДЕКОДИРОВАНИЯ СИГНАЛА И УСТРОЙСТВО ДЕКОДИРОВАНИЯ | 2004 |
|
RU2280324C1 |
| Цифровой измеритель температуры | 1984 |
|
SU1224609A1 |
| Измеритель параметров радиосигналов | 1980 |
|
SU917112A1 |
| СЕЛЕКТОР ВИДЕОИМПУЛЬСОВ | 1990 |
|
SU1841068A1 |
| Линейно- сегментный аппроксиматор | 1984 |
|
SU1183990A1 |
| Система для автоматического резервирования телевизионных линий связи и устройство допускового контроля | 1981 |
|
SU1061291A1 |
| Устройство автоматической регулировки усиления | 1982 |
|
SU1054878A2 |
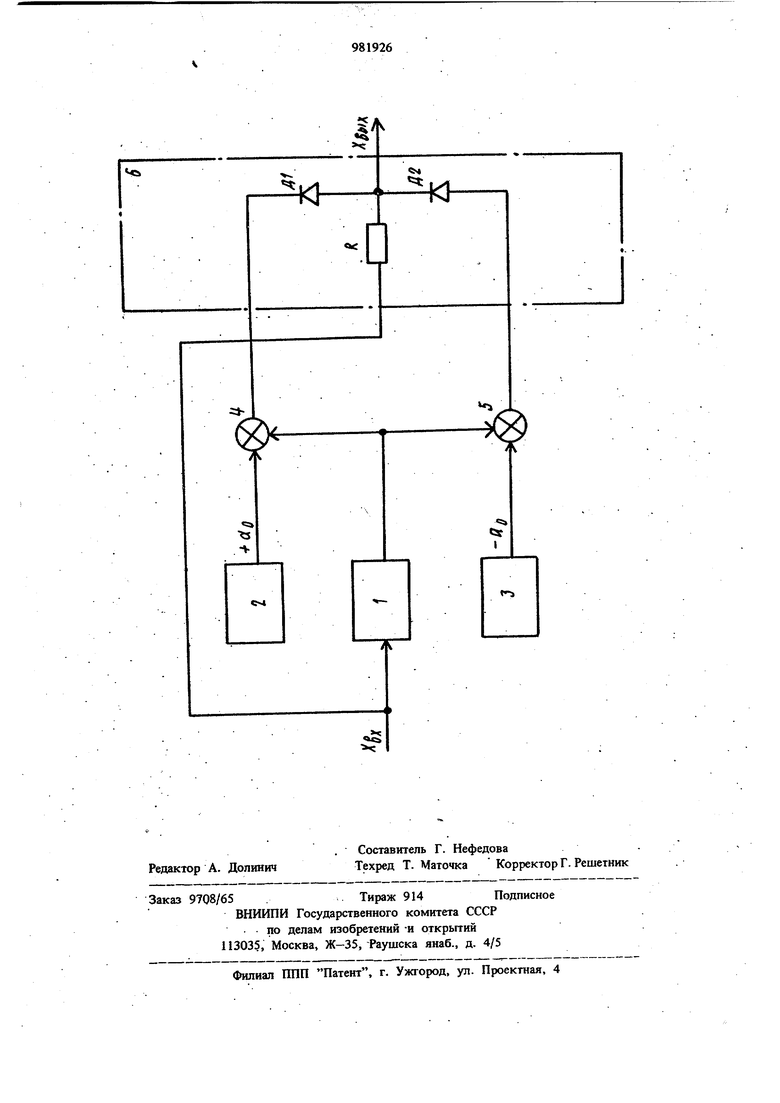
Изобретение относится к автоматическому. управлению. . Извертны линейные низкочастотные фильтры для систем автоматического управления, обеспечивающие фильтрацию высокочастотных помех, наложенных на полезные сигналы. Обычно эти фильтры представляют собой один или несколько апериодических (инер1шонных) элементов, включенных в цепь сигналов 1. Недостатком данных линейных фильтров является слабая фильтрация значительных по амплитуде помех, например, импульсных. Наиболее близким по технической сущности и достигаемому эффекту к изобретению является нелинейный фильтр, содержащий линейный фильтр, источники опорных сигналов положительной и отрицательной полярности, два. сумматора, причем вход фильтра соединен со входом линейного фильтра, вь1хрд линейного фильтра соединен со входами обеих сумматоров, второй вход первого сумматора соединен с выходом источника опорного сигнала положительной полярности, второи вход второго сумматора соединен с выходом источника опорного сигнала отрицательной полярности, вход фильтра и выходы обоих сумматоров попарно подключены ко входам трех селекторов, определяющих наименьшую из двух величин, выходь этих трех селекторов подключены ко входам селекторов, определяющего наибольшую иэ трех величин 2. Недостатком такого фильтра является сложность и, соответственно, пониженная надежность. Цель изобретения - упрощение фильтра и повышение его надежности. Поставленная цель достигается тем, что в фильтр введен Двусторонний ограничитель с управляемыми уровнями ограничения сверху н снизу, причем вход ограничителя соедцнен со входом фильтра, вход управления ограничением сверху соединен с выходом первого сумматора, а вход управления ограничением снизу соединен с выходом второго сумматора; 3 На чертеже показана схема фильтра. Схема содержит линейный фильтр 1, источник опорного сигнала 2 и 3 положительной и отрицательной полярности соответствен но, сумматоры 4 и 5, двусторонний ограничитель 6; диоды DI и Dj, выполняющие функцию управления ограничением сверху и снизу соответственно, R - входной резистор ограничения, XBX.. Хвых. - входной и выходной сигналы фильтра, +ао, -Эо - опорные сигналы. Вход фильтра соединен со входами линейного фильтра 1. Выходы источников опорных сигналов 2 и 3 подключены к входам соответствующих сумматором 4. и 5, к вторым входам сумматоров 4 и 5 подключен выход линейного фильтра 1. Вход фильтра .) подключен также ко входу двустороннего ограничителя 6. Диод DI, входящий в состав ограничителя 6, анодом подключен к выходу сумматора 4, а диоД 0 катодом подключен к выходу сумматора 5. Фильтр работает следующим образом. При отсутствии помех сигнал Хдх- мало отличается от сигнала на выходе линейного фильтра. В э-гбм случае уровни ограничения сверху и снизу двустороннего ограничителя 6 расположены по отношению к его входному сигналу практически симметрично и отстоят от входного сигнала, на величину, близкую к опорному сигналу ао- При этом входной сигнал фильтра и ограничителя , проходит без искажения на выход фильтра. Аналогичным образом действует фильтр при наличии на его входе центрированной высокочастотной помехи, не превышающей по величине опорного сигнала 3.,1 ао В этом случае входной сигнал фильтра вместе с наложенной на него помехой не достигает уровней ограничения ограничителя 6 и проходит без изменения на выход филь ра. При установленном достаточно малом уровне опорного сигнала ао относительное со держание помехи в выходном сигнале Хвых остается несущественным. Рассмотрим действие фильтра при наложении на его входной сигнал импульсной, крат ковременной по продолжительности, но значительной по величине помехи / f И f 7 ао. Если помеха имеет положительную полярность, то, пройдя через линейный фнльтр 1 и будучн в нем сглажена, она незначительно увеличивает уровни ограничения огрйичителя 6. Придя же на вход того же ограничителя она будет ограничена сверху величиной, отличающейся от входного сигнала на +ао. При отрицательной полярности импульсной помехи она будет ограничена снизу величиной, мало отличающейся от -аоФильтр, предложенной схемы более прост в реализации, чем фильтр-прототип (по количеству потребных радиоэлементов - 1,52 раза). Формула изобретения Фильтр для систем автоматического управления, содержащий линейный фильтр, вход которого соединен с входом фильтра, выход с первыми входами сумматоров, вторые входы которых соединены соответственно с выходами источника опорного сигнала положительной полярности и источника опорного сигнала, отрицательной полярности, о т л ичающийся тем, что, с целью упрощения и повыщения надежности фильтра, в него введен двусторонний ограничитель с управляемыми уровнями ограничения сверху и снизу, вход которого соединен с входом фильтра, вход управления ограничением сверху соединен с выходом первого сумматора, а вход управления ограничением снизу соединен с выходом второго сумматора. Источники информации, принятые во внимание при экспертизе 1.Белгородский С. Л. Автоматизация управления посадкой самолета. М., 1972, с. 152156, 286, 187. 2.Гильбо Е. П. и др. Обработка сигналов на основе упорядоченного выбора. М., 1975, с. 281-282 (прототип).
«4
«5t
«
3
Л«5
Csf
I
