(S) УСТРОЙСТВО ДЛЯ ЮСТИРОВАНИЯ ФАЦЕТ ГЕШОСТАТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Гелиокомплекс | 1983 |
|
SU1141274A1 |
| Устройство для юстировки составного плоского зеркала | 1984 |
|
SU1182860A2 |
| Устройство для юстировки составного плоского зеркала | 1983 |
|
SU1126048A1 |
| Устройство для управления солнечнойТЕплОВОй уСТАНОВКОй | 1979 |
|
SU836624A1 |
| Система управления гелиостатом | 1990 |
|
SU1784100A3 |
| АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ НА ОСНОВЕ СОЛНЕЧНОЙ ФОТОЭЛЕКТРИЧЕСКОЙ УСТАНОВКИ | 2011 |
|
RU2479910C1 |
| Гелиостат | 1985 |
|
SU1353995A1 |
| ГЕЛИОУСТАНОВКА | 2006 |
|
RU2325597C2 |
| Гелиоустановка для испытания материалов | 2021 |
|
RU2779610C1 |
| Устройство для слежения гелиоустановки за Солнцем | 1989 |
|
SU1728596A1 |
1
Изобретение относится к гелио- технике, в частности к устройствам для юстирования фацет гелиостатов.
Известно устройств о для юстирова- ния фацет г гелиостата, содержащее подвижное основание и установленный на нем светочувствительный датчик.
В этом устройстве используется искусственный источник излучения фацет гелиостата, а также специализированный вычислительный блок, опреДелякнций траекторию перемещения подвижного основания.
Юстируемые гелиостаты используются в различных типах гелиоустановок, таких как, например, солнечные печи и солнечные энергетические станции. При долговременной эксплуатации гёлиоустановки с множеством гелио статов может возникать необходимость периодической замены или ремонта
гелиостатов, датчиков слежения, сисч тем наведения.,
«
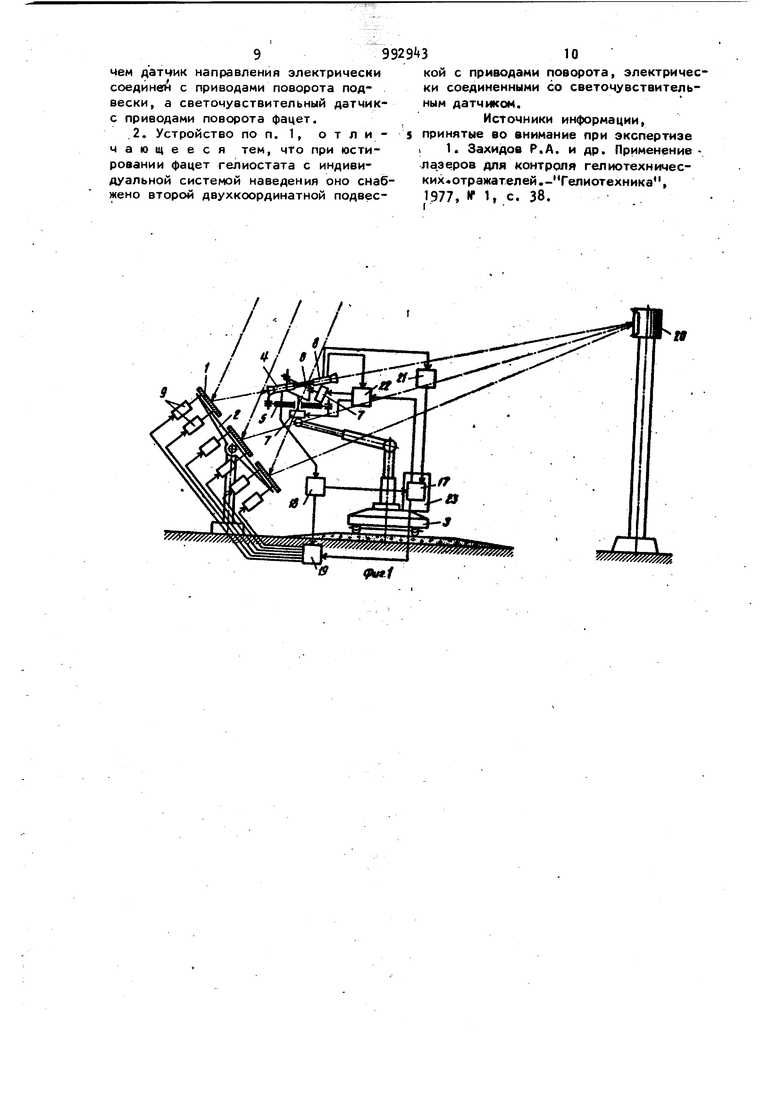
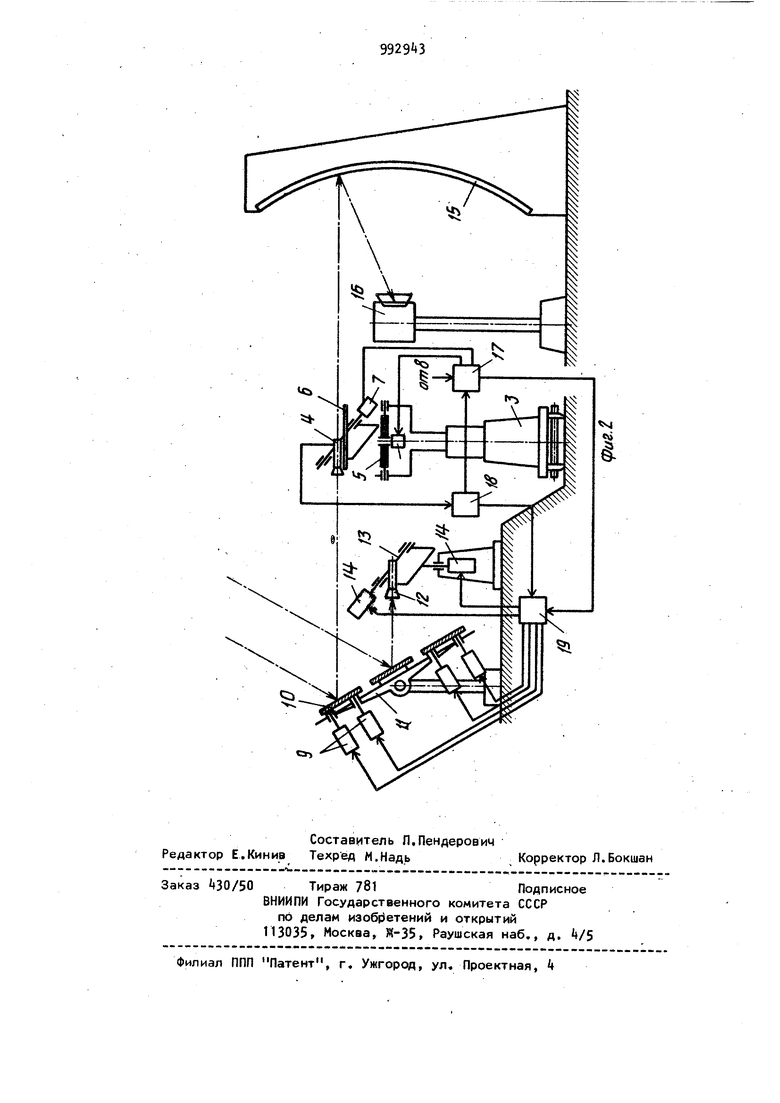
В течение нескольких лет возможна произвольная разориентация оптических осей фацет гелиостатов и датмиков слежения относительно первоначально заданного им положения. Это может происходить из-за деформации несущих конструкций гелиостатов
to вследствие ветровых и температурных воздействий, осадки фундаментов и грунта, что снижает оптико-геометрические характеристики и концентрирующую способность гелиоустановки и 15 эффективность ее народнохозяйственного использования. Периодичность юстироваHvm каждого гелиостата, в общем сяуч, зависит от свойств и качества гелиоустановки, определя20ющих шэзможность сохранять в эксплуатации требуемую оптико-геометрическую точность. При большом количестве Гелиостатов в составе гелиоустановки 399 цикл профилактической обработки всех гелиостатов юстировочным устройством может составить, например, один-два года 13. Однако применение известного устройства для юстирования фацет гелиостата не может быть осуществлено в эксплуатируемой.гелиоустановке в про цессе ее непрерывного слежения за Солнцем. Цель изобретения - расширение диапазона работы устройства для юстирования фацет гелиостата. Поставленная цель достигается тем что известное устройство для юстирования фацет гелиостата, содержащее подвижное основание и установленный на нем светочувствительный датчик, снабжено гироплатформой, расположенной на ней двухкоординатной подвеской с приводами поворота, датчиком направления, расположенным оптически соосно светочувствительному датчи ку и устан овленным вместе с. последни на двухкоординатной подвеске, и приводами поворота фацет, причем датчик направления электрически соединен с приводами поворота подвески, а светочувствительный датчик - с приводами поворота фацет. Причем при юстировании фацет гелиостата с индивидуальной системой наведения устройство снабжено второй двухкоординатной подвеской с приводами поворота, электрически соединенными со светочувствительным датчиком. На фиг. 1 показано устЕ1ойство для юстирования фацет гелиостата солнечной электростанции башенного типа, на фиг. 2 - устройство для юстирования фацет гелиостата с индивидуальной системой наведения, работающего в составе солнечной печи. Устройство для юстирования фацет 1 (фиг. 1) гелиостата 2 содержит по вижное основание 3 и установленный на нем светочувствительный датчик k. Устройство снабжено гироплатформой 5, расположенной на ней двухкоординатной подвеской 6 с приводами 7 по ворота, датчиком 8 направления, расположенным оптически соосно светочув ствительному датчику k и установлен ным вместе с последним на двухкоор. динатной подвеске 6, и приводами 9 поворота фацет 1, причем датчик 8 направления электрически соединен с приводами 7 поворота подвески 6, а светочувствительный датчик - с приводами 9 поворота фацет 1. При юстировании фацет 10 (фиг. 2) гелиостата 11 с индивидуальной системой 12 наведения устройство снабжено второй двухкоординатной подвеской 13 с приводами Т поворота, электрически соединенными со светочувствительным датчиком l. Гелиостат 11 работает в составе солнечной печи, выполненной на основе параболоида 15. В фокусе параболоида 15 размещен приемник 1б излучения. Индивидуальная система 12 наведения гелиостата 11 на Солнце условно предста лена лишь в виде светочувствительного датчика (приводы поворота рамы гелиостата 11 не показаны). Поскольку в работе солнечной печи направления оптических осей каждого гелиостата 11 и каждой его фацеты 10 остаются параллельными оптической оси параболоида 15, то датчик 8 направления нужен лишь при первоначальной установке устройства (не показан). В этом случае а качестве датчика 8 направления применяют гиротаодолит. Светочувствительный датчик i системы 12 наведения установлен на подвеске 13. Электрическое управление приводами 7 поворота подвески 6 осуществляется по гиротеодолиту с пульта 17 оператора. Светочувствительный датчик k через блок 18 управления и блок 19 переключения электрически соединен с приводами 9 поворота фацет 10 и приводами поворота подвески 13 со светочувствительным датчиком индивидуальной системы 12 наведения гелиостата 11 на Солнце. Блок 18 управления электрически соединен и с пультом 17 оператора для визуального контроля отъюстированного положения. а устройстве дляюстирования фацет 1 (фиг. 1) гелиостата 2, входящего в состав гелиостатного поля солнечной электростанции башенного типа, с центральным приемником 20 излучения, в качестве датчика 8 направления используют телевизионный датчик, например, оснащенный оптикой видиконх Датчик 8 направления через блок 21 обработки видеосигнала связан с пультом 17 оператора, обеспечивая .визуальный контроль его наведения на приемник 20 излучения. Электрическое соединение датчика 8 направления- с приводами 7 поворота подвески 6 осуществляется через преобразовательный блок 22, 8клюцаю14ий узел измерителя координат. Пульт 17 оператора также электрически соединен с преобразовательным блоком 22, что обеспечивает ручное наведение датчика 8 направления на приемник 20 излучения. Пульт 17 оператора расположен в кабине 23 на подвижном основании 3. Гироплатформа 5 выполнена трехосной с автоматической силовой коррекцией и демпфированием направления по меридиану и вертикали. В ней использована система стабилизации типа гироазимут горизонт. В качестве светочувствительного датчика k использова квадратного типа фотодатчик. Подключение приводов 9 юстируемых фацет 1 к датчику может осуществляться с помощью-блока 19 переключения в авто матическом режиме. Подвижное основа ние 3 выполняют в виде самоходной те лежки, оснащенной телескопическим гидроподъемником с рабочей площадкой Устройство для юстирования фацет гелиостата работает следующим образом, . При корректировке положения 1 (фиг. 1) гелиостата 2, входящего в состав гелиостатного поля сол нечной электростанции башенного типа с центральным приемником 20 излучения , имеющего групповую систему наве дения (не показана), устройство для юстирования с помощью подвижного основания 3, управляемого оператором, располагают в зоне отраженных юстируемой фацетой 1 лучей. Оператором по видеосигналу блока 21 спульта 17 через преобразовательный.блок 22 пер воначально обеспечивается наведение датчика 8 направления на приемник 20 излучения, после чего производится переключение датчика 8 на автоматическое сопровождение приемника 20. Наведение датчика 8 направления осуществляется перемещениями двухкоординатной подвески 6 с помощью приводов 7 поворота, электрически соединенных с преобразовательным бло ком 22, включающим узел измерителя координат получаемого на видиконе (датчика 8) изображения фокальной зоны приемника 20 излучения. Гиропла форма 5 обеспечивает высокую точност наведения, компенсируя внешние силовые возмущения (толчки, порывы ветра и другие)i Отклонение отраженнего юстируемой фацеты 1 луча от ус тановленного датчиком 8 направления на приемник 20 воспринимается светочувствительный датчиком t (квадратного типа фотодатчик) и преобразованное в электрические сигналы через блок 18 управления и блок 19 перек.лючения поступает на соответствующие, приводы 9 юстируемой фацеты 1. Блок 19 может работать в автоматическом режиме либо подключать приводы 9 по сигналу с пульта 17 оператора. После корректировки положения фацеты 1 светочувствительный датчик 4 с помощью подвижного основания 3 перемещается оператором к другой фацете 1 гелиостата 2. Обход ряда гелиостатов 22 начинают с северной или южной стороны гелиостатного поля вокруг башни с приемником 20 по ходу видимого перемещения Солнца При корректировке фацет 10 (фиг.2) гелиостата 11, входящего в-состав солнечной печи, выполненной на основе параболоида 15 с приемником 16 излучения, и имеющего, индивидуальный датчик, системы 12 располагают на двухкоординатной подвеске 13 с приводами Н, а светочувствительный элемент k с помощью подвижного основания 3 управляемого оператором, располагают в зоне отраженных центральной фацетой 10 лучей. Датчик 8 направления (не показан), которым в данном случае служит гиротеодолит, задает направление, параллельное оптической оси параболоида 15. По сигналу гиротеодолита (например, путем отсчета делений), поступающему к оператору с пульта 17i подаются электрические сигналы на приводы 7 поворота двухкоординат-ной подвески 6, обеспечивающие требуемое ориентирование устройства для юстирования. Гкфоплатформа 5 обес- печивает точность ориентирования независимо от силовых воздействий на устройство и однократное использование гиротеодолита. Отклонение отраженного центральной фацетой 10 луча от установленного гиротеодолитом направления воспринимается светочувствительным датчиком и преобразованное в электрические сигналы через блок 18 управлен ия и блок 19 переключения поступает на соответствующие приводы }k поворота двухкоординатнЫ1 подвески 13 со светочуаствительным датчиком системы 12 наве дения, вызывая поворот рамы гелиостата 11 до исчезновения отклонения Затем датчик 4 с помощью подвижного основания 3, управляемого oneратором, располагают в зоне отражен ных другой фацетой 10 (нецентральной) лучей. Отклонение отраженных л чей от заданного направления воспри нимается датчиком k -и преобразованное им в электрические сигналы поступает через блоки 18 и 19 на приводы 9 поворота соответствующей нецентральной фацеты 10 гелиостата 1 1 . Корректировка положения датчика системы 12 наведения и фацет 10 может быть осуществлена как в автоматическом режиме, так и с контролем оператором ( по сигналам.с пульта 17). Блоки 18, 19, 21 и 2 могут быть расположены на подвижном основании 3, а электрическая связь с пр водами 9 поворота фацет 10 или 1 (фиг. 1) может осуществляться переносным кабелем. Снабжение устройства для юстирования датчиком 8 направления, оптически соосным со светочувствительным датчиком Ц и установленным вместе с последним на двухкоординатной подвеске 6 с пр1 водами 7 поворота, а также его электрическое соединени с приводами 7 позволяют выставить о тическую ось устройства в требуемом направлении в автоматическом, полуавтоматическом или ручном режимах, что обеспечивает корректировку положения фацет 1 гелиостата 2 в про цессе слежения последним за положением Солнца, что, в свою очередь, позволяет компенсировать систематич кие интегральные погрешности систем наведения гелиостатов, повышая точность и интегральную плотность концентрации солнечного излучения -в фокальной зоне приемника 20 излучения. Кроме того, юстируемые факты 1 о разуют вогнутую поверхность на протяжении всего поля гелиостатов 2, что дополнительно повышает КПД гели оустановки, в частности солнечной электростанции бащенного типа. Мак.симальное повышение концентрации со нечного излучения достигается при. соблюдении суточного и годичного гр фиков юстироеки по зонам поля гелио статов 2, Расположение двухкоординатной подвески 6 на гироплатформе 5 обеспечивает высокую точность ориентации устройства для юстирования независимо от силовых возмущений, действующих на устройство, что дополнительно повышает КПД юстируемой гелиоустановки. Коррекция положения фацет 1 и 10 достигается с помощью установленных на рамах гелиостатов 2 и -11 соответственно приводов 9 поворота. Введение второй двухкоординатной подвески 13 с приводами 14 обеспечивает корректировку оптической оси светочувствительного датчика индивидуальной системы 12 наведения гелиостата 11, что повышает коэффициент концентрации солнечного излучения и позволяет при необходимости разорентировать гелиостат 11, не прекращая процесса наведения н Солнце, что, в свою очередь, обеспечивает регулирование плотности излучения на приемнике 16 в кратчайший период времени. Устройство позволяет автоматизировать юстирование, производить выборочный контроль ориентации светочувствительных датчиков индивидуальных систем наведения и фацет гелиостатов в процессе работы гелиоустановки, производить начальное юстирование фацет, после их монтажа на гелиостате и выполнять необходимую оптическую ориентацию элементов гелиоустановки, что, в свою очередь, обеспечивает высокий коэффициент концентрации оптической системы гелиоустановки при длительной эксплуатации. Формула изобретения 1. Устройство для юстирования фацет гелиостата, содержащее подвижное основание и установленный на нем светочувствительный датчик, отличающееся тем, что, с целью расширения диапазона работы, оно снабжено гироплатфОрмой, расположенной на ней двухкоординатной подвеской с приводами поворота, датчиком направления, расположенным оптически соосно светочувствительному датчику и установленным вместе с последним на двухкоординатной подвеске, и приводами поворота фацет, причем датчик направления электрически соедйне с приводами поворота подвески, а светочувствительный датчикс приводами поворота фацет. ,2. Устройство по п, 1, отличающееся тем, что при юстировании фацет гелиостата с индивидуальной системой наведения оно снабжено второй двухкоординатной подвес iS99 310 кой с приводами поворота, электрически соединенными со светочувствительным датчиком. Источники информации, принятые во внимание при экспертизе 1. Захидов . и др. Применение лазеров для контроля гелиотехнических«отражателей.- Гелиотехника, 1977, W 1, с. 38.
