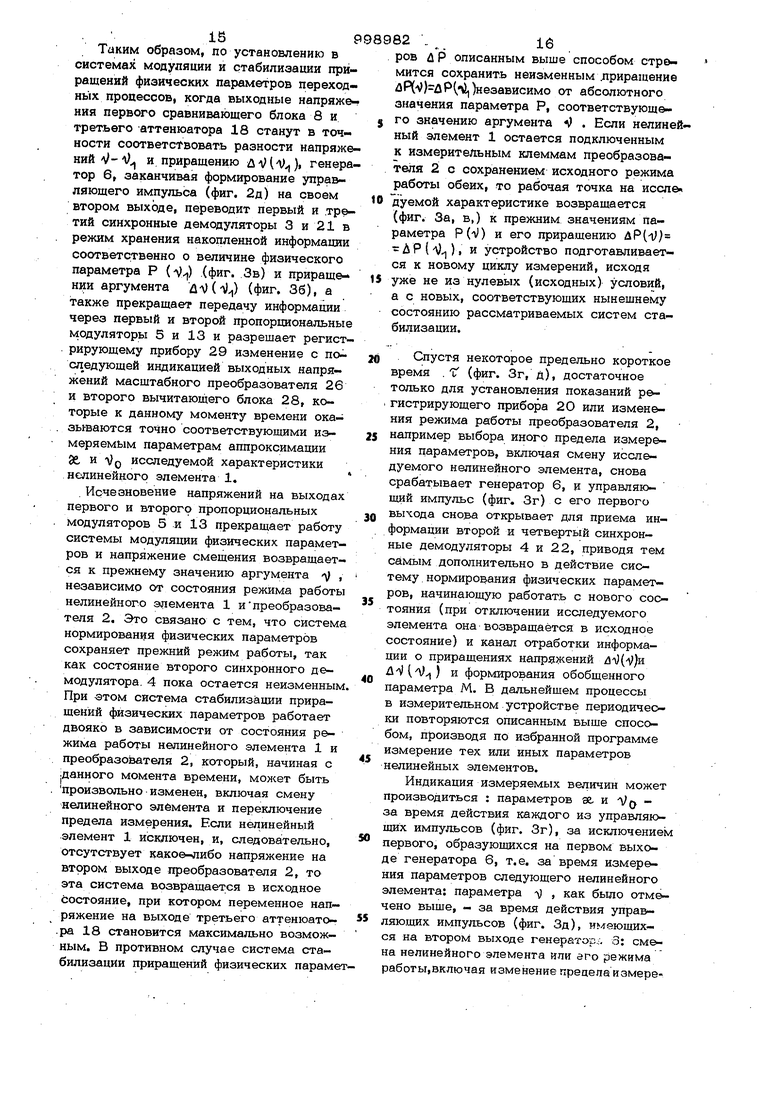
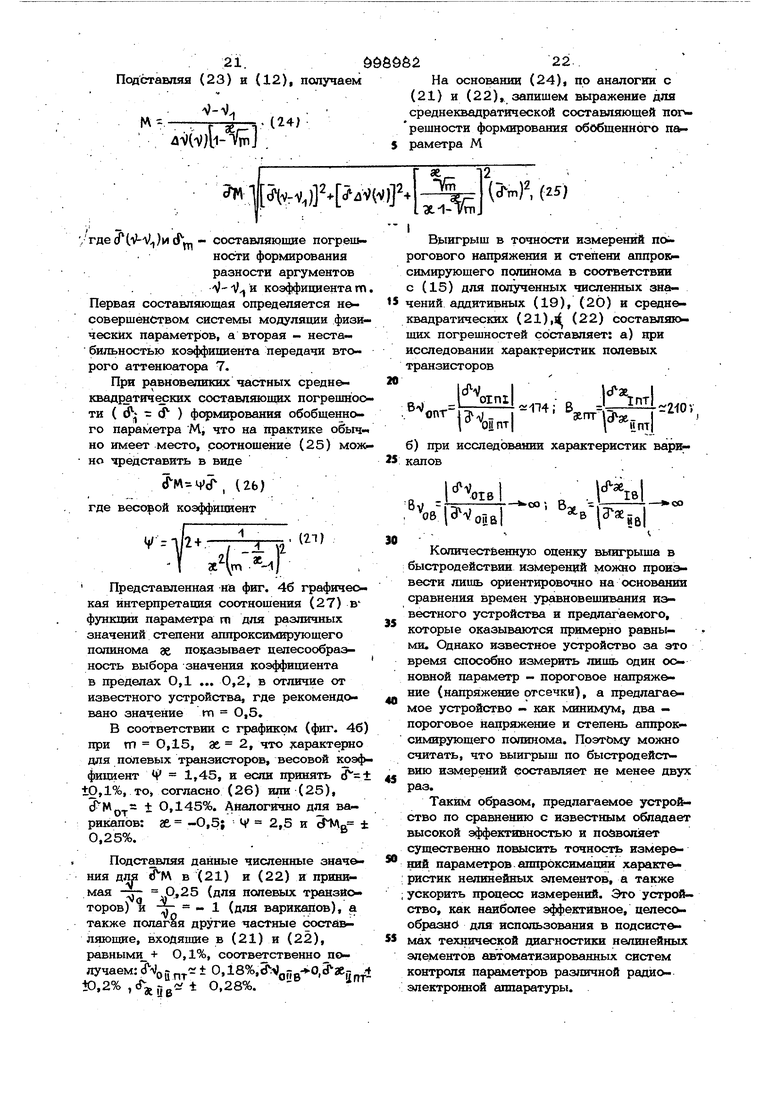
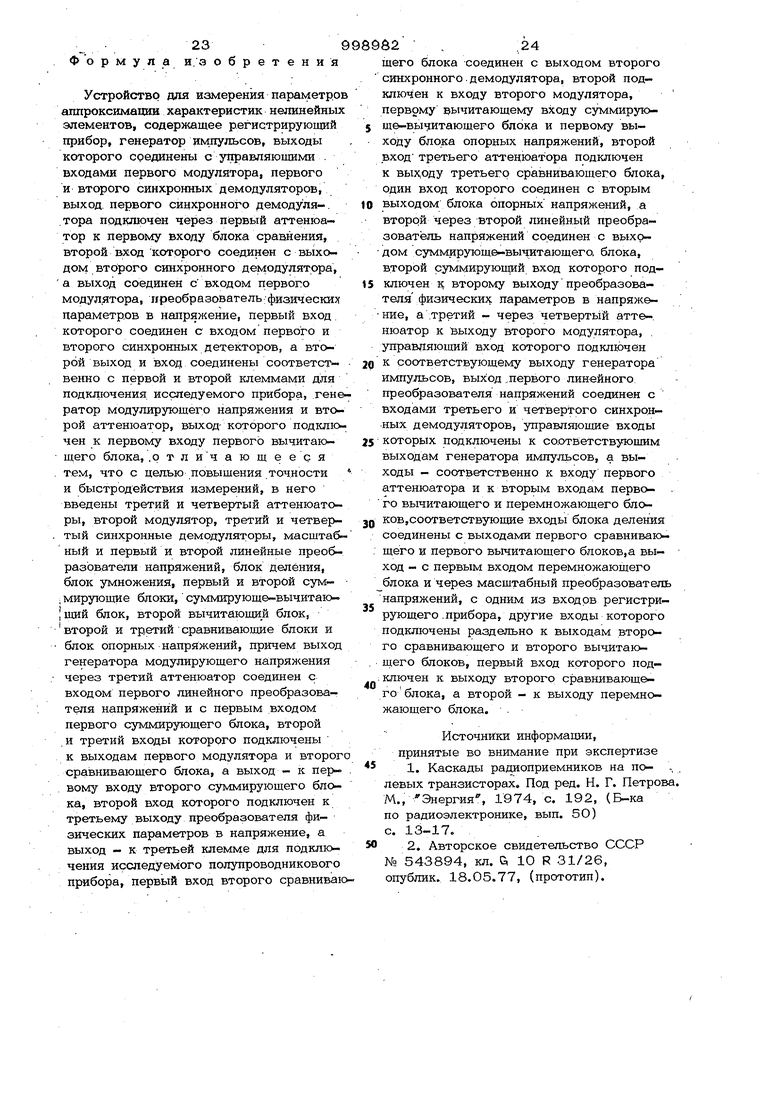
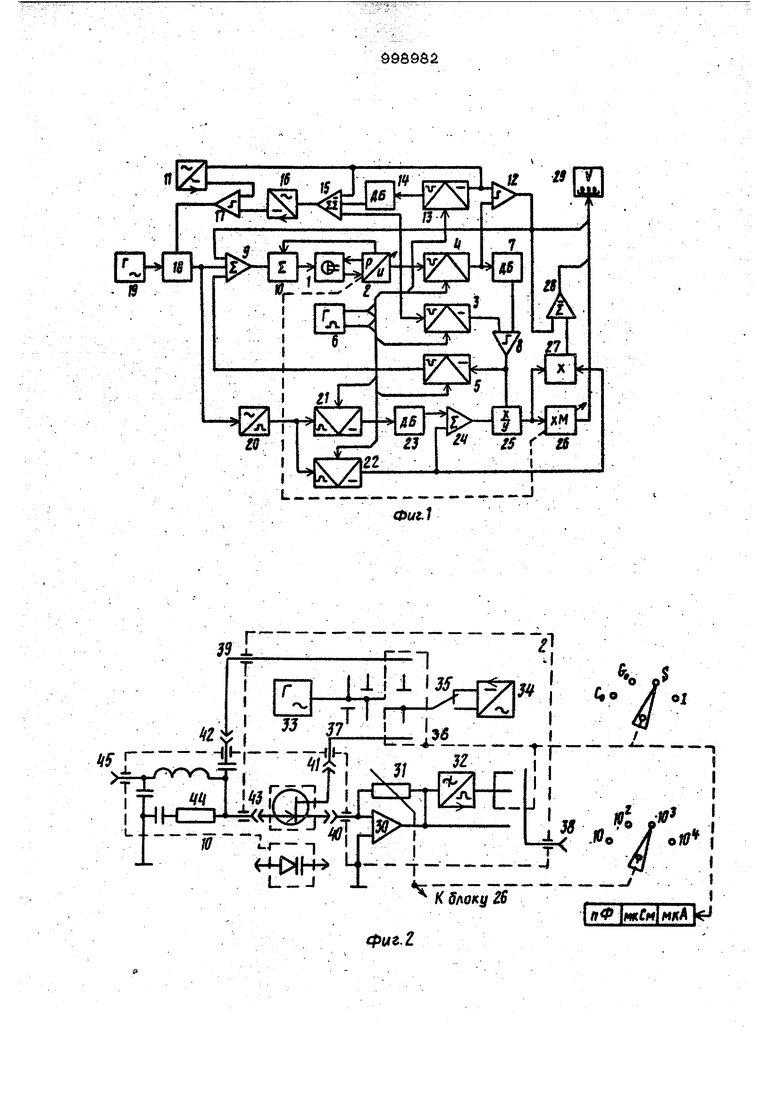
(54) УСТРОЙСТВО .ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ АППРОКСИМАЦИИ ХАРАКТЕРИСТИК НЕЛИНЕЙНЫХ ЭЛЕМЕНТОВ 1 . - . ; Изрбретение относится к радиоизмерительной технике, предназначено для измерения степени аппроксимирующего полинома характеристики управления полевых транзисторов, варикапов и таких параметров этих приборов как нащ)яж&ние отсечки, контактная разность потенциалов, значения физических параметров в исследуемой точке и т.д. с повышенной точностью и быстродействием и может быть использовано для измерения аналогичных параметров других нелинейных элементов, характеристики которых аппроксимируются степенным полиномом Известен способ измерения параметров аппроксимации характеристик управ ления полевых транзисторов, заключающийся в определении напряжения отсечки, а также тока стока и крутизны при заданном напряжении затвор-исток с последующим расчетом степени аппроксимирующего полинома по установленному соотношению 1 Однако данный способ не обеспечивает требуемой точности и быстродействия измерений из-за необходимос1и определения по существу разнородных параметров аппроксимации с присущими в отдельности методическими и техничес1шми трудностями, так как отсутствует единый обобщенный параметр, характеризующий все остальные. Наиболее близким к изобретению техническим решением является устройство, содержащее регистрирующий Прибор, г&нератор импульсов, два синхронных д&модулятора, сравнивающий и в 1читан щий блоки, два аттенюатора, а также пропорциональный модулятор и преобразователь физических параметров в напряжение, включающий генератор пер&- . менного напряжения, операционный уси- литель, амплитудный детектор, переключатель и блок напряжений смещения 2 Однако известное устройство позволяет достаточно точно с высоким быстродействием определить лишь напряжение отсечки полевых транзисторов, характе;ристики крутизны и проводимости канала которых имеют степень аппроксимирующего полинома равную единице, и не обладает таковыми свойствами при измерениях аналогичных и других парамет ров аппроксимации характеристик нелине ных элементов с произвольной степенью нелинейности. Целью изобретения является повышение точности и быстродействия измерений. Указанная цель достигается тем,.что в устройство для измерения параметров аппроксимации характеристик нелинейных элементов, содержащее регистрирующий прибор, генератор импульсов, выходы которого соединены с управляющими вхо дами первого модулятора, первого и второго синхронных демодуляторов, выход первого синхронного демодулятора подключен через первый аттенюатор к первому входу блока сравнения, второй вход которого соединен с выходом второго синхронного демодулятора, а выход соединен с входбм первого модулятора, преобразователь физических параметров в напряжение, первый выход которого соединен с входом первого и второго синхронных детекторов, а второй выход и вход соединены соответственно с первой и второй клеммами для подключения исследуемого прибора, генератор модулирующего напряжения и второй аттенюа тор, выход которого подключен к первому входу первого вычитающего блока, введены третий и четвертый аттенюаторы, второй модулятор, третий и четвертый синхронньш демодуляторы, масштабный и первый и второй линейные преобразователи напряжений, блок деления, блок умножения, первый и второй суммирующие блоки, суммирующе-вычитающий блок, второй вычитающий блок, вто рой и третий сравнивающие блоки и блок опорных напряжений, причем выход гене ратора модулирующего напряжения через третий аттенюатор соединен с входом первого линейного преобразователя напряжений и с первым входом первого суммирующего блока, второй и третий входы которого подключены к выходам первого модулятора и второго сравнивак щего блока, а выход - к первому входу второго суммирующего блока, второй вход которого подключен к третьему выходу преобразователя физических параметров в напряжение, а выход - к третьей клемме для подключения иСследуемого полупроводникового прибора, первый вход второго сравнивающего блока соединен с выходом второго синхронного демодулятора, второй подключен к входу второго модулятора, первому вычитающему входу суммирующе-вычитающего блока и первому выходу блока опорных напряжений, второй вход треть&го аттенюатора подключен к выходу третьего сравнивающего блока, один вход которого соединен с вторым выходом блока опорных напряжений, а второй, через второй линейный преобразователь напряжений соединен с выходом суммирующе-вычитающего блока, второй суммирующий вход которого подключен к йторому выходу преобразователя физических параметров в напряжение, а третий - через четвертый аттенюатор к выходу второго модулятора, управляющий вход которого подключен к соответствующему выходу генератора импульсов, выход первого линейного преобразователя напряжения соединен с входами третьего и четвертого синхронных демодуляторов, управляющие входы которых подключены к соответствующим выходам генератора импульсов, а выходы - соответственно к входу первого аттенюатора и вторым входам первого вычитающего и перемножающего блоков, соответствующие входы блока деления соединены с выходами первого сравнивающего и первого вычитающего блоков, а выход - с первым входом перемножающего блока и через масщтабный преобразователь напряжений, с одним из входов регистрирующего прибора, другие входы которого подключены раздельно; к выходам второго сравнивающего и второго вычитающего блоков, первый вход которого подключен к выходу второго сравнивающего блока, а второй -. к выходу перемножающего блока. Сущность изобретения состоит в следующем. Проходные характеристики в функции управляющего воздействия ряда нелинейных элементов в общем виде могут быть аппроксимированы степенным полиномом PU)P vj р (AJ ) - ф;ункция, под обозначением Р где к эторой понимают всевозможные физические, параметры (ток, проводимость, емкость, индуктивность и. т.д.), а под аргументом V -напряжения, пропорш1ональн1 1е воздействуюидам факторам (ток, напряжение, давление, температура и т.д.) вызывающим изменения физических параметров в исследуемой точке; - максимальное значение функции, соответстьующее определенному значению аргумента, например л) О; л1л - пороговое напряжение, характеризующее экстремальные значения исследуемых функций О или со , например, для полевых транзисторов это напряжение соответствует напр жению отсечки JaQoTC при котором канал лишается проводимости (PtUjd ото О) а для варикапов - контактной разности потенциалов VK при компенсации внешним напряжением ( и - к ) которой барьерная емкость условно устремляется в бескЬнечность; степень аппроксимирующего полинома, отличие которой от единицы является мерой нелин ности исследуемых характерно тик, - в общем случае она мо жет быть величиной как больш так и меньше нуля; например, для некоторых типов полевых транзисторов ,1,9...2,2, а для варикапов эе - (О,3.. О,5). Для отмеченных типов Снёпинейных элементов существ -. жесткая связь между знаками 1 ±, стоящими перед параметр ми л) и эе , а именно, знак + в скобках соотношения (1 соответствует характеристикам варикапов, а знак - - полевым транзисторам. Для определения искомых величин проди фференцируем (1) по параметру л) /V аеи f То) (« ЭР, ,. . „ макс --1,л1)±«--г- Решая совместно (-2) и (1), получа W) at )-,(3) J « з соотношений (3) и (4) видно, параметры аппроксимации жестко мосвязаны и для их раздельного иэния необходимо отысйать другие олее обобщенные параметры, в полной е характеризующие искомые величиак как соотношения (3) и (4) гаыимы при любых значениях л/ , заируем величину параметра V и ставим (3) в виде aePHJ ,l i±Vo; avогда на основании (3) и (5) можаписать||cv. aePl-y) ,.5 Отсюдар(л; ) дл учетом (6) соотношение (4) приобет вид -V.. (pv,) ЭР jap. pR) a 7 Переходя к конечным приращениям ыполняя в процессе измерений уоияflP(V) AP( U) РЮ коэффициент п может быть выбран ным 0,15, выражения (6) и (7) ественно упрощаем (M-vjuPiv) PU)4V(V)-mdV(V) ° r (л1л;,)дл)(л1) 1 nJ II-1- v . (л) ° LuV(a)-niav tf-,) J Ввдя обобщенный параметр dVCvbmavtv) чательно получаем ,.M.Pill. PiV) )(V)) Предлагаемое устройство в автомати ческом режиме производит измерение фи зических параметров Р.и приращений ...напряжений Л л) , пропорциональных прои tUV . ff водным, при двух значениях напряжений V ил), при которых автоматически вы полняются условия (8) и (9), вычисляе значение обобщенного параметра .(12) и в соответствии с (13) и (14) определяет искомые параметры аппроксимации соответствующих характеристик нелиней ных элементов, обеспечивая выигрыш в точности и быстродействии измерений. На фиг. 1 представлена структурная схема предлагаемого устройства для иэ мерения параметров аппроксимации хара теристик нелинейных элементов; на фиг. J упрощенная структурная схема преобра. зователя физических параметров, в напряжение, соединенного с исследуемым нелине -ым элементом и вторым суммирующим блоком; на фиг. 3 - диаграммы поясняющие принцип работы устройства; на фиг. 4 - диаграммы, поясняющие выигрыщ в точности измерений параметр аппроксимации характеристик нелинейных элементов. Устройство (фиг. 1) включает ряд функциональных систем. Исследуемый элемент 1, преобразователь 2 физических параметров в напряжение, первый и второй синхронные демодуляторы 3 и 4 и первый пропорциональный модулятор 5, управляемые генератором 6 импульсов, а также второй .аттенюатор 7 с.коэффициентом передачи равным (9), первый сравнивающий блок 8 и первый и второй суммирующие блоки 9 и 10 образуют систему модуляции физических параметров, позволящую при измерениях автоматически выполнить условие (9), при котором уст навливает ся заданное соотнощение .параметров в соответствующих точках исследуемых характеристик, например i 0,15 и, следовательно, непосредственно определить разность напряжений л) , , вхо. в (1О) - (12). Блок 11 опорных напряжений, и второ сравнивающий блок 12, входящие совместно с первым и вторым суммирующими блоками 9 и 1О, преобразовате, жение и вторым синхронным демодулятором 4 в состав системы нормирования физических параме ров, позволяет застабилизировать независимо от действия различных факторов значение параметра в одной из отсчетныхточек P(V) исследуемых характеристик нелинейного элемента 1 и, следовательно, однозначно , определить ее координаты, информация / J / Q которых входит в (13) и (14). Отс етную точку Р(л))на исследуемых характеристиках выбирают таким , чтобы ее ордината соответствовала, например, пределам измерений каждого из параметров преобразователя 2, что достижимо .при первичной регулировке опорного напряжения блока 11 и коэффициента передачи преобразователя 2 физических параметров, в напряжение. Второй пропорциональный модулятор 13, управляемый генератором 6 импуль- сов, четвертый аттенюатор 14с коэф- ,/,л/Л фициентом передачи равным (1-т) (9), суммирующе-вычитающий блок 15, второй линейный преобразователь 16 напряжений, третий сравнивающий блок 17, третий аттенюатор 18, управляемый напряжением, и генератор 19 модулирующего . напряжения совместно с первым и вторым суммирующими блоками 9 и 10, преоб- . разователем 2 физических параметров в напряжение и блоком 11 опорных напряжений образуют систему стабилизации приращений др физических параметров независимо от положения отсчетных точек Р(1))и Р(.л),) на исследуемых характеристиках нелинейного элемента 1, которая в процессе измерений производит необходимую обработку сигналов и совместно с указанными выше системами обеспечивает автоматическое выполнение условия (8). Первый линейный преобразователь 20 напрядсений, третий и четвертый синхронные демодуляторы 21 и 22, первый аттенюатор 23 с коэффициентом передачи равным m (9), первый вычитающий блок 24 и делящий блок 25 . представляют собой канал обработки информации о приращениях напряжений Д(л)и Дл)(Ч)), пропорциональных производным в точках Р(л}) исследуемых характеристик, и формирования в соответствии с (12) обобщенного параметра М. Масштабный преобразователь 26 напряжений и перемножающий блок 27с вторым вычитающим блоком 28 образуют каналы измерения параметров эб и . Vg , которые осушествпяют дальнейшие преобразования получаемой внформашга и вычисление .в соответствии с уравнениями (13) и (14) искомых параметров : с последующей передачей для индикашт на регистрирующий прибор 29. Для автоматической коррекции показаний регистрирующего прибора 29, связанных с изменением пределов измерения физических параметров (делитель P(V) в формуле (13) управляющие органы преоб разователя 2 |л1зических параметров в напряжение и масштабного преобразователя 26, осуществляющие изменение их коэффициентов передачи, сопряжены меж ду собой. Преобразователь 2 физических параметров в напряжение (фиг. 2) включает операционный усилитель ЗО, имеющий в цепи отрицательной обратной связи резистор 31, с помощью которого можно изменять коэф(}ициеят передачи, и исследуемый нелинейный элемент 1, а также амплитудный детектор 32, соединенный с выходом усилителя 30, генератор 33 переменного напряжения, блок 34 напряжений смещения и два переключателя 35 и 36. С помощью переключателя 35 .на два положения можно изменять поляр ность напряжений смешения блока 34 в случае исследования трехполюсных нелинейных элементов, например полевых транзисторов с различным типом проводимости канала.- Переключатель 36 На четыре положения с тремя направляющими, каждая по порядку представляющая собой соответственно .первый, второ и третий выходы 37 - 39 преобразователя 2, позволяет перево;ить преобразователь в необходамый режим преобразования физических параметров в напряжение, например емкости С варикапов и активной проводимости Ci крутизны S i и тока 1 полевых транзисторов. Для создания нормального .режима работы вход преобразователя, 2, которым является вход onepajm.OHHOro усилителя 3 и первый выход 37 этого же преобразователя соединены раздельно с первой и второй клеммами 4О и 41 для подключения исследуемых элементов 1. Третий выход преобразователя 2 подключен к вт рому входу 42 второго суммирующего блока 10 (фиг. 2), выход которого соединен с третьей клеммой 43 для подклю ченйя исследуемых элементов 1.. Для исследования двухполюсных нелинейных
элементов, например варикапов, эти эле-
ного, пропорционального приращ.ению параменты подключают к первой и третьей клеммам 40 и 43, при этом вторая клемма 41 остается свободной. Второй суммирующий блок (фиг. 2) выполнен в виде широкополюсного пассиш ного сумматора, на активном резисторе 44 сравнительно небольшого номинала которого происходит суммирование относительно низкочастотных, включая .tiocтоянную составляющую, сигналов, поступающих на первый вход 45 с выхода первого суммирующего блока 9 (фиг. 1) и относительно высокочастотных сигналов, поступающих на второй вход 42 с третьего выхода 39 преобразователя 2 (фиг. 2). Величины реактивных элементов второго суммирующего блока 10 (;фиг. 2) выбраны такими, что исключается взаимное влияние источников сигналов, действующих в этом блоке. Динамика процессов, протекающих в устройстве, состоит в следующем,, При подключении к соответствующим клеммам 40 - 43 (фиг. 2) устройства исследуемого нелинейного элемента 1, например полевого транзистора, и переводе с помощью переключателей 35 и 36 в необходимый режим работы п еобразователя 2 физических параметров в напряжение, например в режим преобразования крутизны S (фиг. 2), рабочая точка нелинейного элемента оказывается смещенной в область максимальных значений параметров исследуемой характеристики Р ;(л)(фиг. 3) под влиянием большого разностного сигнала , возникающего во втором сравнивающем блоке 12 (фиг. 1) за счет действия опорного напряжения блока 11 и отсутствия в данный момент временя напряжения синхронного демодулятора 4. Кроме этого, под влиянием большого разностного сигнала, образующегося за счет аналогичных действий в третьем сравнивающем бпоке 17, коэффициент передачи третьего аттенюатора 18 становится максимальным к модулирующее напряже ние генератора 19 без заметного ослабления передаётся совместно с напряжением второго сравнивающего блокв 12 через первый и второй суммирующие блоки 9 и 1О на управляющий электрод исследуемого нелинейного элемейнгга 1, что способствует образованию на втором выходе 38 (фиг. 2) преобразователя 2 напряжений (фйг. 3) в виде суммы постоянного, пропорционального величине параметра Р ( U (Р) Р (V), и перемен1196метра йР (ли (Р) АР (V) независимо от местонахождения рабочей точки на исследуемой характеристике. Образующийся на втором выходе преобразователя 2 сигнал поступает для обработки на один из суммирующих входов суммирующе-вычитающего блока 15 и информационные входы синхронных демодуляторов 3 и 4, причем второй синхронный демодулятор 4 в данный момент времени оказывается открытым для приема информацки под действием первого импульСа (фиг. 3 г), -вырабатываемого генератором 6. Получаемое не выходе синхронного демодулятора 4 напряжение, не содержащее , модулирующего сигнала генератора 19, преодолевая во втором ; сравнивающем блоке 12 опорное напряжение блока 11, переводит рабочую точку нелинейного элемента 1 на участок характеристики, определяемый начальными условиями с последующей стабилизацией в установивщемся режиме величины параметра Р (л) (фиг. За) с заданной точностью, независимо от влияния различных факторов, за счет изменения напряжения смещения -V , создаваемо. го на выходе сравнивающего блока 12, которое поступает на один из входов второго вычитающего блока 28, а также на регистрирующий прибор 2 9, Одновременно с этим полное выходное напряжение преобразователя 2 в суммирующе-вычитающем блоке 15 вычитается с опорным напряжением блока . 11, образуя на выходе блока 15 только переменную составляющую .напряжения ли (Р) (фиг. За), пропорциональную приращению ДР (V) ,(фиг. 3в). Получаемое переменное напряжение, преобразуяс во втором тшнейном преобразователе 16 в постоянное (фиг. 3 ж), преодолевает Б третьем сравнивающем блоке 17 опорное напряжедае блока 11 и изменяет коэффициент передачи.третьего аттенюато ра 18 таким образом, чтобы в установи шемся рбйкиме сохранить постоянной с заданной степенью точности и независимо от влияния различного рода факторов в том числе и напряжения смещения нелинейного элемента, величину приращения ди (Р)ЕДР(О) (фиг. 3 в), действующего на выходе преобразователя, что возможно за счет изменения приращения напряжения uU ()Д л (л)) (фиг. 3 б), соэдаваемого генератором 19 модулирующего напряжения на выходе третьего аттенюатора 18. При таких условиях выход212ное напряжение третьего аттенюатора 18 (фиг. Зз), несущее информацию с производной физических параметров в точке Р ()) исслед,емой характеристики нелинейного элемента 1, поступает в первый линейный преобразователь 20, где превращается в постоянное напряжение (фиг. Зи), пропорциональное приращению аргумента дл(л}) и накапливается в четвертом синхронном демодуляторе 22, который в рассматриваемый момент времени оказывается открытым для приема информации так же, как и синхронный демодулятор 4, под влиянием первого импульса (фиг. Зг) генератора 6. Образуемое на выходе синхронного демодулятора 22 напряжение воздействует на соответствующие входы первого вычитающего и перемножающего блоков 24 27. По окончании управляющего импульса генератора 6, длительность которого зависит от времени установления переходных процессов в рассматриваемых систе- мах авторегулировок, второй и четвертой, синхронные демодуляторы 4 и 22 переходят в режим хранения накопленной информации соответственно о величинах параметра Р (V) и приращения аргумента Дл)(л), а первый и третий синхронные демодуляторы 3 и 21, воспринимая с второго выхода генератора 6 управляющий импульс (фиг. Зд) - в режим приема информации. Одновременно с этим импульс с второго выхода генератора 6 открывает для передачи информации первый и второй пропорциональные. модуляторы 5 и 13, а также разрешает регистрирующему прибору 29 измерение и индикацию одного из параметров аппроксимации - напряжения смещения, действующего на выходе второго сравнивающего блока 12, которое к данному моменту времени оказывается установив- щемся и соответствует величина исследуемого физического параметра Р (V) связи генератора 6, синхронизирующие работу регистрируюего прибора 29, (не показаны). При этом напряжение, хранимое во втором синхронном демодуляторе 4, сравнивается с приобретаемым напряжением первого синхронного демодулятора 3 в первом сравнивающем блоке 8, на выходе которого, из-за явного преобладания в данный момент времени выходного напряжения демодулятора 3, образуется резкий перепад напряжения, который через, открытый первый пропор139PSSS214
цяональный модулятор 5, первый и вто- . системы стабилизацщ приращашй - посрой суммирующие блоки 9 и 10 беспре-тоянство приращений параметров (8) непятственно .передается на управляющий электрод нелинейного элемента 1 и сме щает рабочую точку в область меньших значений физических параметров Р (V), вызывая тем самь1м модуляцию параметров исследуемого нелинейного элемента и одновременно изменение производной в соответствии с новым значением напряжения смещения. Получаемое на втором выходе прео&разователя 2 напряжение с меньшим уровнем и(Р)Е Р (Л) после слежени с частью опорного напряжения, поступаю щего от блока 11 через открытый вторЬ пропорциональный модулятор 13 и четве тый аттенюатор 14, Имеющий, коэффициент передачи равный (1-|т), полность крмпенсируется в суммирующе-вычитающем блоке 15 с полным опорным напря- жением блока 11, создавая на выходе блока 15 только переменную составляющую дЦ(Р)дР (V)( фиг. 2в) меньшей амплитуды, однако система стабилизации приращений физических параметров дР , стремясь воспрепятствовать изменению этой амплитуды (фиг. 2е) после ее выпрямления (фиг. 2ж) во втором линейном Преобразователе 16 и сравне ния в блоке 17 вызывает скачкообразное изменение коэффициента передачи третьего аттенюатора 18: и, следовательно, увеличение на его выходе модулирующего напряжения (фиг, Зз), создаваемого генератором 19, .. По истечении предельного короткого интервала времени, неотмеченного на диаграммах:..(фиг. 36, в, е, .,, .и), как- ные системы стабилизации приходят в равновесное состояние, непрерывно поддерживая постоянными с заданной степенью точности значение физического параметра P|V) и соответстви н с уровнем затухания второго аттенюатора 7, а также величину приращения этого параметра йР{л1,), в точности равного приращению ДРЫ) в соответствии с уровнем опорного напряж:ения, имеющегося на втором выходе блока 11. При этом в результате работы системы модуляции достигается необходимая глубина модуля ции (9) физических параметров нелинейного элемента (фиг. Зв), независимо от влияния различного рода факторов, за счет стабилиГзации абсолютной разности напряжений и()-и,Л) (фиг, 36 образуемой на выходе первого сравниваю щего блока 8, а в результате работы зависимо от местонахождения рабочей точки на исследуемой характеристик (фиг. За) за счет авторегу ровки Ш дулирующего воздействия aU(.V) ЛV (.V) (фиг. 36, з), образуемого на выходе третьего аттенюатора 18 и несущего (шформацию о производных, входящих в выражения (6) и (7). Одновременно с протеканием переход« ix процессов и установлением стациопарного режима работы рассмотренных систем стабилизации производится дадьгнейшее непрерывное преобразование их выходных сигналов в канале обработки информации о приращениях налряж 1Ий ДОСл) и uVlV )и форми рования. обобщенного параметра М, а также в каналах измерения исксмых г(|1рш детров зе и VQ . Выходное напряжение (фиг. Зз) третьего аттенюатора 18 снова выпрямляется в первом линейном преобр1азрвателе 2О И в виде постоянного напряжения (фиг, Зи), пропорционального приращению аргумента aV (V I, накапливается в третьем синхронном демодуляторе 21. Данная информация о приращении аргумента; участвует в соответствии с (12) в формировав НИИ обобщенного параметра М., т.е. ослабляется в необходимые чисра раз в первом аттенюаторе 23 (коэффициент передачи аттенюатора равен т), вычитается в блохе 24 с хранимой инфо1 мацией четвертого синхронного дем дулятора 22, а получаемая разность напряжения управляет коэффициентом деление делящего блЬка 25, на выходе которого после взаимодействия с нагфяжением (U- U )5 (V - -У ) (фиг. 36) первого сравнивающего &1ока 8 образуется напряжение, пропорциональное обобщенному параметру М. Далее это напряжение, проходя масштабный преобразователь 26, порождает в соответст вии с (13) напряжение, прсягорционалх ное искомому, параметру at , а также взаимодействуя i. соответствии с (14) в перемножающем блоке с. хранимь1М напряжением четвертого синхронного демодулятсфа 22 ти во втором вычитающем блоке 28 с выходным напряжением второго сравнивающего блока 12, напряжение, пропорциональное искомому параметру VQ Образуемые на выходах масшабного преобразователя 26 и второго вычитающего блока 28 напряжения поступают на регистрирующий прибор 29, Таким образом, по установлению в системах модуляции и стабилизации приращений физических параметров переходных процессов, когда выходные напряже ния первого сравнивающего блока 8 и третьего аттенюатора 18 станут в точности соответствовать разности напряже ний V- V и приращению uV(-V), генера тор 6, заканчивая формирование управляющего импульса (фиг. 2д) на своем втором выходе, переводит первый и .третий синхронные демодуляторы 3 и 21 в режим хранения накопленной информации соответственно о величине физического параметра Р (Vvt) .(фиг. .Зв) и приращеНИИ аргумента Л-)()) (фиг. 36), а также прекращает передачу информации через первый и второй пропорциональные модуляторы 5 и 13 и разрешает регист рирующему прибору 29 изменение с по сл едующей индикацией выходных напряжений масштабного преобразователя 26 и второго вычитающего блока 28, которые к данному моменту времени ока- зьтаются точно соответствующими измеряемым параметрам аппроксимации Эе, и VQ исследуемой характеристики нелинейного элемента 1. Исчезновение напряжений на выходах первого и второго пропорциональных модуляторов 5 и 13 прекращает работу системы модуляции физических параметров и напряжение смещения возвращается к прежнему значению аргумента , независимо от состояния режима работы нелинейного элемента 1 ипреобразователя 2. Это связано с тем, что система нормирования физических параметров сохраняет прежний режим работы, так как состояние второго синхронного демодулятора. 4 пока остается неизменным При -этом система стабилизации приращений физических параметров работает двояко в зависимости от состояния режима работы нелинейного элемента 1 и преобразо)зателя 2, который, начиная с |данного момента времени, быть произвольно изменен, включая смену нелинейного элемента и переключение предела измерения. Если нелинейный элемент 1 исключен, и, следовательно, отсутствует какое-либо напряжение на втором выходе преобразователя 2, то эта система возвращается в исходное состояние, при котором переменное напряжение на выходе третьего аттенюато.ра 18 становится максимально возможным. В противном случае система стабилизации приращений физических парам ров и Р описанным выще способом стремится сохранить неизменным лриращение dP(V)ЛP(,лl)нeзaвиcимo от абсолютного значения параметра Р, соответствующ&го значению аргумента л) . Если нелинейный элемент 1 остается подключенным к измерительным клеммам преобразователя 2 с сохранением исходного режима работы обеих, то рабочая точка на иссле дуемой характеристике возвращается (фиг. За, в,) к прежним значениям Параметра P(V) и его приращению йР() 9(), и устройство подготавливается к новому циклу измерений, исходя уже не из нулевых (исходных) условий, а с новых, соответствующих нынещнему состоянию рассматриваемых систем стабилизации. Спустя некоторое предельно короткое время . f (фиг. Зг, д), достаточное только для установления показаний р&гистрирующего прибора 20 или изменения режима работы преобразователя 2, например выбора иного предела измер&ния параметров, включая смену исследуемого нелинейного элемента, снова срабатывает генератор 6, и управляющий импульс (фиг. Зг) с его первого выхода снова открывает для приема информации второй и четвертый синхронные демодуляторы 4 и 22, приводя тем самым дополнительно в действие систему нормирования физических параметров, начинающую работать с нового состояния (при отключении исследуемого элемента она возвращается в исходное состояние) и канал отработки информации о приращениях напряжений /а)()и Л л1 (Лх ) и формирования обобщенного параметра М. В дальнейшем процессы в измерительном устройстве периодически повторяются описанным выще способом, производя по избранной программе измерение тех или иных параметров нелинейных элементов. Индикация измеряемых величин может производиться : параметров ае. и V за время действия каждого из управляющих импульсов (фиг. Зг), за исключением первого, образующихся на первом выходе генератора 6, т.е. за время измерения параметров следующего нелинейного элемента: параметра - , как было отмечено выше, - за время действия упра&ляющих импульсов (фиг. Зд), имеющихся на втором выходе генератор.:, о: смена нелинейного элемента или его режима работы,включая изменение предела камере17:998ния преобразователя2-заинтервал време-r ни 1г , образуемый между импульсами у (фиг. Зд), появляющимися последова- . тельно на втором и первом выходах генератора 6, который при необходимости может регулироватьсжГ в широких пределах. включая режим Останов, Индикахшя других параметров аппроксимации, а име но значений .физических парам эов в исследуемой точке характеристики РСл)) производится с п6мо11а ю указателя поло жения управляющего органа резистора 3 (фиг, 2), сопряженного с масштабным преобразователем 26, который может быть оцифрован в значениях пределов измеряемых величин (фиг. 2) с указа нием соответствующих наименований физических единиц, например пикофарад (пф), микросш«1енсов (мкСм), микроампер (мкА) в зависимости от вида ио- . следуемых характеристик нелинейного элемента (переключатель 36). . Выбор предела измерения физических параметров при исследовании одного и того же нелинейного элемента на показаниях регистрирующего прибора 29, измеряющего параметры зь и л)р , не должен оказываться, если только характеристики этого элемента соответствуют степенной функции, так как при изменен НИИ коэффициента .передачи преобразова теля 2 автоматически подстраивается обобщенный параметр М ii2), входящий в выражения (13) и (.14), и одноврёмен нокорректируется ко9ф йщиент пфедачи масштабного преобразователя 26, так, что отношение -pT-rj , гредставленное 6 аналоговых величинах, остается пооТО5ШНЫМ. Если при изменении предела наблюдаются различия в измеряемых параметрах ае и VQ то это свидетельствует о том, что анализируемый интервал характеристики не соответст вует степенному полиному и его необ- ход шло сузить, причем характерным, признаком для установлетпш границ этого интервала может явиться допустимое отклонение измеряемых величин эй, и VQ Предлагаемое устройство отличается ; повышенной точнсютью и- быстродейстувием измерений, что обеспечивается ис- пользованием в устройстве изложенного выше метода определения параметров аппроксимации характеристик нелинейных элементов, позволяющего практически полностью исключить составляющие погрешности, обусловленных -нелинейностью исследуемых. характеристик, KOTopbie присущи известным методам измерений J :55 6218 и 1вляются преобладающими при отклонениях степени аппроксимиру эшёго полинома от единипы, достигаа десятков процентов, а также реализацией соответствующего алгоритма работы устройства, позвопжощего в автоматическом режиме одновременно измерять все параметрры аппроксимации с минимально возможными погрещнсютями, ускоряя тем самым процесс измерений. Для количественной оценки вьшгрыша в точности измерений параметров иоследуемых элементов целесообразно и оходить из сравнения соответствующих сумм систематичес сих (аддитивных) и случайных (среднеквадратических) составляющих погрешностей, образуемых в известном f|j. и tf j и предлагаемой ,сГ f; и сГ; if устройствах за счет влиянияразличного рода факторов: ,..М1М.Ы.1«, . №af Pi,l : : Таким образом, для достоверной оценки вышраща (15) достаточно определить лишь аддитивную составляющую погрешности известного устройства и среднеквадраТИчёскую предлагаемого, -так как из ш 1Шеизпоженного справедлик 1 соотношения №il №i|-,l isl KiulАддитивная составляющая погрешноо ти измерения параметра в самом общем виде., ,,(«, где VQ - пороговое напряжение, исследуемой характеристики нелинейного элемента, получаемое с помощью известного устройства при отличии степени шшрок- симгрующего полинсма от еди. . ницы. В связи с тем, что нзв ггное устройство п товано на линейной аппроксимации характеристик нелинейных элементов то для нахохэдения величины V достаточно не исследуемой хёфактеристике Сфиг. 4а) провести прямую, проходящую через тр тс1чки с координатами (V)},,.шp(V. ,0. уравнение прямой, проходящей через данные точки, имеет вид 0-РИ) Р(л)-тр1У) Отсюда -0)1 0 Vnl Разность аргументов , V-V является промежуточной величиной (неудобной для практического использования) и ее целесообразно представить через измеряемы параметры. Для этого воспользуемся исходным соотношением (1) и составим уравнение,, (VI 1ЧГЧ« г решение которого позволяет определить искомую величину A/-vV-Vo(,1--l)(--tl), (18) Подставляя(17) и (18) в (16), получаем. „. ) И, Для значений параметров - - 0,25 ,т 0,5, , характерных дл§ таких нелинейных элементов как, наприм полевые:транзисторы, при измерениях на известном устройстве оГпт ЗИотс 31,5%. При исследовании на этом же устройстве, например варикапов с э& - 0,5, целесообразно принять - - 1 тогда при m 0,5 погрешность определения контактной разности потенциалов составит cГ)„т„ ., с - 200%. 01 D . Аддитивную составляющую погрешнос ти измерения параметра зе с помощью -Jit J- {(dM) dae- Vl wl -ES Pl jfl +CS i fviP; (22; где ., (V;, (n;),(V)- Среднеквадратические составляюшие погрешности формирования параметров M,V,AV(-V),PW), ЛР(-У) , обусловленные не.совершенством соответствующих систем стабилизации. В связи с тем, что в предлагаемом устройстве использованы однотипные статические системы стабизизации, отмеченные составляющие погрешности, за исключением первой, оказываются равновеликими и могут быть приняты каждая в отдельности примерно равными ((Tci ± tO,l%). В формировании обобшенного па9220 известного устройства можно оценить на основании (3) при условии, что параметр P(V) и его производная - определяется точно, а прраметр приближенно, - в соответствии с (17) Л)У вл/v- те РГ п л)) Принимая во внимание (16), полуаем искомую погрешность в удобном для практического использования виде. R-) С учетом ранее принятых численных значений параметров, входящих в (20), для тех. же нелинейных элементов соответственно имеем cTae-j-j -42% и сГэе., - Отсюда следует, что.оценить относительно точно значение параметра ге, с по- мошью известного устройства не представляется возможным. Среднеквадратические составляющие погрешности из}41ерений параметров л)о и зе , характерные для предлагаемого устройства, определим на основании соотношений (13) и (14) путем почленного дифференцирования по каждому из параметров, влияющих, на точность измерений, с последующим геометрическим суммированием получаемых частных составляющих)Ч) (2) раметра М (12) участвуют. практически все системы устройства и составляющую оМ следует рассмотреть более подробно. Анализируя соотношение (12). нетрудно заметить, что между величинами й-(л)и дл)() строгая корреляционная связь. Во - первых, они формируют; ся одной и той же системой стабилизации приращений, во- вторых, их соотношение определяется, очевидно, параметрами апгфоксимации, и, следовательно, зависит от коэффициента m . Действительно, решая совместно (12), (14) и (18) можно установить, что лл1/ ) Г uVlV) Ш
гдecГ(V-V-,)и - составляющие погрешности формирования разности аргументов .V- Vxj и коэффициента m.
Первая составляющая определяется несовершенством системы модуляции физических параметр ов, а вторая - нестабильностью коэффициента передачи второго аттенюатора 7.
При равновеликих частных среди еквадратических составляющих погрешнооти ( - (Г ) формирования обобщенного параметра М, что на практике обычно имеет место, сортнощение (25) представить в виде
, Ufe) где весорой коэффициент
(21)
/ -- (-
Vm
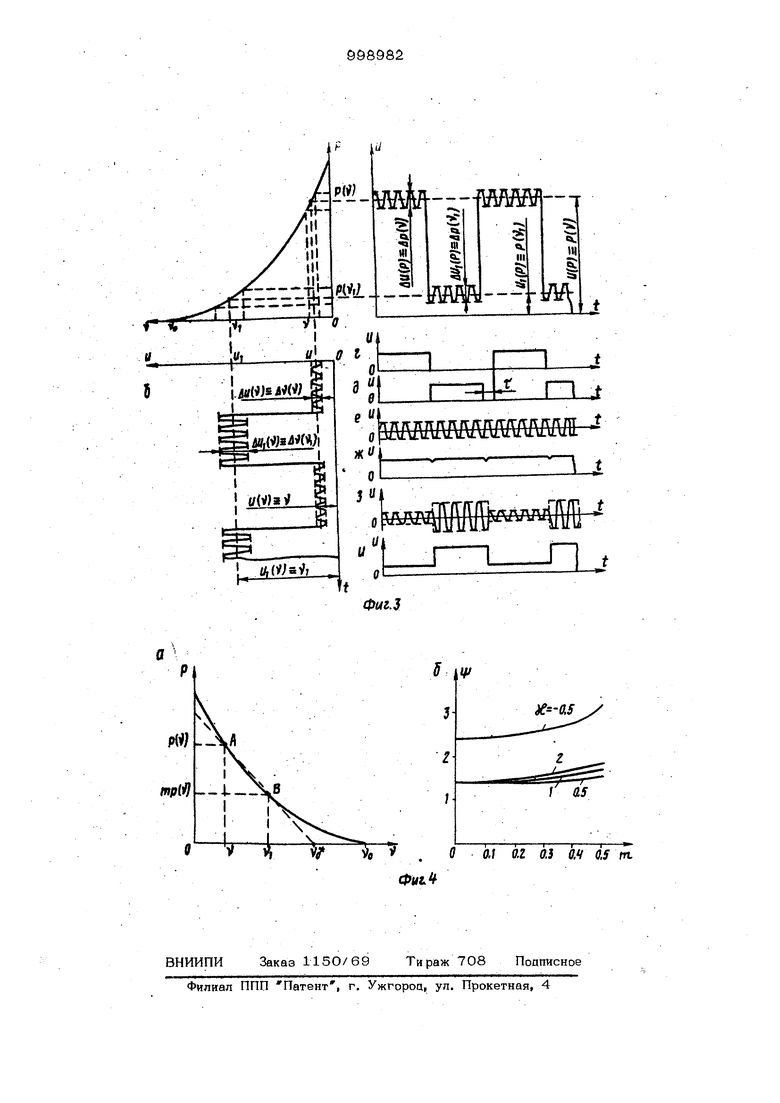
Представленная на фиг. 46 графичеокая интерпретация соотношения (27) в функции параметра m для различных значений степени аппроксимирующего полинома эе показывает целесообразность выбора значения коэффициента в пределах О,1 ... 0,2, в отличие от известного устройства, где рекомендовано значение m 0,5.
В соответствии с графиком (фиг. 46) при m 0,15, зе. 2, что характерно для полевых транзисторов, весовой к эффициент V 1,45, и если принять -±
±О,1%, то, согласно (26) или (25), сГМр ± 0,145%. Аналогично для варикапов: ае. -0,5; Ц 2,5 и
стц ± 0,25%.
Подставляя данные численные значения для «TW в (21) и (22) и принимая - О,25 (для полевых транзио торов) и - - 1 (для варика11ов), а также полагая другие частные соста&ляющие, входящие в (21) и (22), равными + О,1%, соответственно получаем: ).., ± О, i8%,5 V-f:o o, .t
Unfоцв
Ю,2% ,аеОв- 0.28%.
I
Вьшгрыш в точности измерений по рогового напряжения и степени аппрокнсимируюшего полинома в соответствии с (15) для полученных численных значений аддитивных (19), (2О) и среднеквадратических (21),j (22) составляк щих погрешностей составляет: а) при исследовании характеристик полевых транзисторов
..
oini
П4; В
crZlOv
i,
.
аепт
0 1пт|r lnjl
исследовании характеристик вари..
(fV,
01 в
i
COi Во
00
,
-В
она
Количестбенную оценку выигрыша в быстродействии измерений можно произвести лишь ориентировочно на основании сравнения времен уравновешивания иэвестного устройства и предлагаемого, которые оказываются примерно равными. Однако известное устройство за это время способно измерить лишь один основной параметр - пороговое напряжение (напряжение отсечки), а предлагаемое устройство - как минимум, два - пороговое напряжение и степень аппроксимирующего полинома. Поэтому можно считать, что выигрыш по быстродейст вию измерений составляет не менее двух раз.
Таким образом, предлагаемое устройство по сравнению с известным обладает высокой эффектявностъю и позволяет существенно повысить точность измерений параметров аппроксимации характе ристик нелинейных элементов, а также ; ускорить npcniecc измерений. Это устройство, как наиболее эффективное, целесообразнб для использования в подсистемах технической диагностики нелинейных элементов автоматизированных систем контроля параметров различной радиоэлектронной аппаратуры. 23 Ф о р м у л а и. 3 обретения Устройство для измерения параметро аппроксимации характеристик нелинейных элементов, содержащее регистрирующий прибор, генератор импульсов, выходы которого соединены с управляющими . входами первого модулятора, первого и второго синхронных демодуляторов, выход, первого синхронного демодуля-. .тора подключен через первый аттенюатор к первому входу блока сравнения, второй вход которого соединен с выходом второго синхронного демодулятора, а выход соединен свходом первого модулятора, преобразователь:физически)( параметров в напряжение, первый вход которого соединен с входом первого и второго синхронных детекторов, а второй выход и вход соединены соответственно с первой и второй клеммами для подключения исследуемого прибора, гене ратор модулирующего напряжения и второй аттенюатор, выход- которого под1шн чен к первому входу первого вычитающего блока, ,р тличающее с я . тем, что с целью повыщения точности и быстродействия измерений, в него введены третий и четвертый аттенюаторы, второй модулятор, третий и четвер. тый Синхронные демодуляторы, масштабный и первый и второй линейные преобразователи напряжений, блок деления, блок умножения, первый и второй сум, мирующие блоки, суммирующе-вычитающий блок, второй вычитающий блок, второй и третий сравнивающие блоки и блок опорных напряжений, причем выход генератора модулирующего напряжения через третий аттенюатор соединен с входом первого линейного преобразователя напряжений и с первым входом первого суммирующего блока, второй и третий входы которого подключены к выходам первого модулятора и второг сравнивающего блока, а выход - к первому входу второго суммирующего блока, второй вход которого подключен к третьему выходу преобразователя физических параметров в напряжение, а выход - к третьей клемме для подклк чения исследуемого полупроводникового прибора, первый вход второго сравниваю 82 щего блока соединен с выходом второго синхронного.демодулятора, второй подключен к входу второго модулятора, первому вычитающему входу суммирутоще-вычитающего блока и первому выходу блока опорных напряжений, второй вход третьего аттенюатора подключен к выходу третьего сравнивающего блока, один вход которого соединен с вторым выходом блока опорных напряжений, а второй через второй линейный преобразователь напряжений соединен с выхрдом суммирующе-вычитающего, блока, второй суммирующий вход которого под- ключен к второму выходу преобразователя физических параметров в напряжение, а .третий - через четвертый атте-. нюатор к выходу второго модулятора, управляющий вход которого подключен к соответствующему выходу генератора импульсов, выход.первого линейного преобразователя напряжений соединен с входами третьего и четвертого синхронных демодуляторов, управляющие входы которых подключены к соответствующим выходам генератора импульсов, а выходы - соответственно к входу первого аттенюатора и к вторым входам первого вычитающего и перемножающего блоков,соответствующие входы блока деления Соединены с выходами первого сравниваю- щего и первого вычитающего блоков, а выход - с первым входом перемножающего блока и через масщтабный преобразователь напряжений, с одним из входов регистрирующего .прибора, другие входы которого подключены раздельно к выходам второго сравнивающего и второго вычитающего блоков, первый вход которого подключен к выходу второго сравнивающегоблока, а второй - к выходу перемножающего блока. . Источники информации, принятые во внимание при экспертизе 1. Каскады радиоприемников на по- . левых транзисторах. Под ред. Н. Г. Петрова. М., Энергия, 1974, с. 192, (Б-ка по радиоэлектронике, вып. 5О) с. 13-17. 2. Авторское свидетельство СССР № 543894, кл. G, 10 R 31/26, опублик. 18.05.77, (прототип).


i г Iff r rrr1t I Т.. Л1 I .. i-r-L -jb jTrr - -jziU-Hii ; йЗХ- I 7 Ай1 f - «HI ylfSILJ- L : J. L.-I JL J I III I я, . J 7/W .X .IWe . KSftOKy26 Iff imfajwAM Фиг.г .5 Ve f , 0 0.1 O.Z 0.3 О.Ч 0. ФМ1 tn.
