Изобретение относится к электрическим машинам, а именно к линейным электродвигателям, и может быть использовано в качестве управляемого электропривода для транспортных систем гибких автоматизированных производств, а также в качестве датчика отработки шагов шаговым двигателем в системах с импульсным управлением для сравнения числа управляющих импульсов с отработанными шагами на компараторе.
Известны линейные электродвигатели для перемещения и позиционирования исполнительных механизмов, содержащие безобмоточный зубчатый индуктор, якорь с обмотками и фотодатчик положения, имеющие сложную конструкцию [1] .
Наиболее близким решением по технической сущности к заявляемому, принятым за прототип, является линейный электродвигатель, содержащий плоский безобмоточный индуктор, выполненный в виде плиты с нарезанными зубьями, пазы которого заполнены светопоглощающим материалом, якорь с зубцами на рабочих поверхностях полюсов, обращенных к зубцам индуктора и охваченных обмотками, датчик положения, включающий приемный элемент, излучатель, светокоммутатор и световод [2] .
Недостатком этого устройства является невозможность определения направления перемещения вторичного элемента (якоря).
Целью изобретения является расширение эксплуатационных возможностей путем определения направления перемещения якоря.
Цель достигается линейным электродвигателем, содержащим зубчатый индуктор с обмоткой, якорь, обращенный к зубцам индуктора, охваченным фазными катушками, фотодатчик положения, содержащий приемный элемент и излучатель. Якорь снабжен светоотражающей полосой с повторяющимися участками, каждый из которых содержит три элемента, два из которых равны между собой, расположены под углом друг к другу и к направлению продольной оси индбуктора, при этом излучабтель размещен между приемными элементами, их оси параллельны между собой и перпендикулярны продольной оси индуктора, а расстояние между излучателем и приемными элементами равно проекции элементов светоотражающей полосы, расположенных под углом к продольной оси индуктора, на эту ось. Фотодатчик размещен так, что при облучении световым потоком отражающей полосы свет в зависимости от положения вторичного элемента (якоря) будет отражаться на один из фотоприемников, а в случае нахождения напротив излучателя участка, расположенного параллельно оси, вдоль которой перемещается вторичный элемент (якорь), или же напротив угла, образованного наклонными участки светоотражающей полосы, сигнал фотоприемниками не будет выдан.
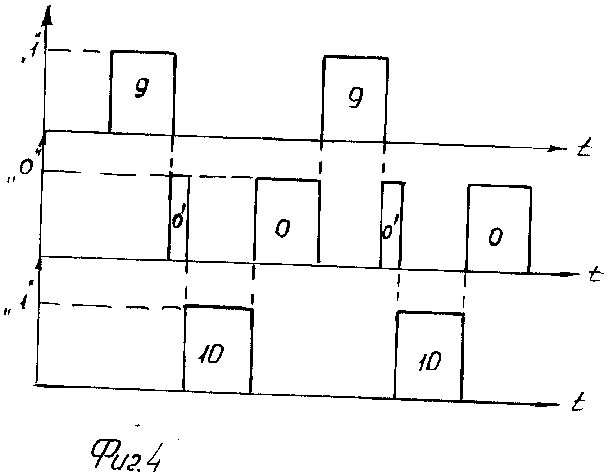
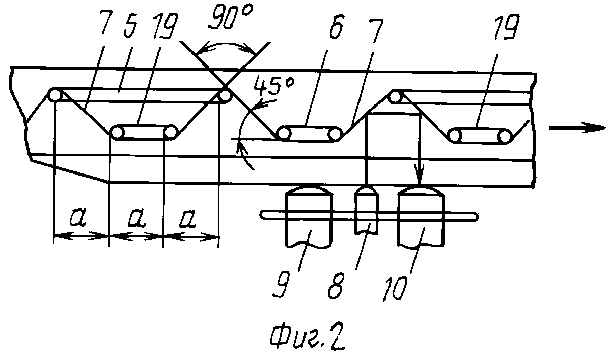
На фиг. 1 и 2 изображен линейный двигатель с фотодатчиком положения; на фиг. 3 - блок-схема выдачи информации о направлении движения якоря и координате положения якоря; на фиг. 4 - порядок следования сигналов "0", "0" и "1".
Он содержит индуктор, состоящий из магнитопровода 1 с обмотками 2, уложенными в пазах, якорь, содержащий реактивную полосу 3 с ответным магнитопроводом 4. На ответном магнитопроводе с помощью направляющих скоб 5 и 6 размещена светоотражающая полоса 7, выполненная с повторяющимися участками. Фотодатчик оптически связан с отражающей полосой и состоит из одного светоизлучателя 8 и двух фотоприемников 9 и 10, выходы которых подключены к входам операционных усилителей 11 и 12 (см. фиг. 3), которые выходами связаны с логическим элементом ИЛИ-НЕ 13, реверсивным счетчиком 14, логической схемой 15, цифроаналоговым преобразователем 16, дифференциальным звеном 17; элементы 14-16 соединены выходами с устройством 18 импульсного управления.
Элбектродвигатель работает следующим образом. При подаче питающего напряжения на обмотку индуктора создается бегущее электромагнитное поле, которое наводит в реактивной полосе якоря ЭДС, обуславливающую протекание вихревых токов, при взаимодействии которых с полем создается тяговое усилие. Под воздействием тягового усилия якорь перемещается в прямом или обратном направлении в зависимости от направления движения бегущего электромагнитного поля. При движении якоря относительбно фотодатчика в зависимости от направления будут поочередно освещаться фотоприемники 9 и 10 с кратковременной паузой между ними, а затем будет следовать продолжительная пауза. При нахождении излучателя 8 напротив участка 19 (см. фиг. 2) и угла, образованного сторонами отражающей полости 7, фототок с выходов фотодиодов 9 и 10 на логические усилители 11 и 12 поступать не будет и поэтому на их выходах будет сигнал, соответствующий логическому "0", который поступит на входы логического элемента ИЛИ-НЕ 13. При поступлении логического "0" на оба входа элемента ИЛИ-НЕ 13 он выдаст на выходе сигнал, пропорциональный логической "1", которая соответствует нахождению напротив излучателя участка 19. Сигналы с выходов усилителей 11 и 12 элемента ИЛИ-НЕ 13 поступают на логическую схему 15, которая служит для определения направления перемещения вторичного элемента. Работа логической схемы заключается в выдаче сигнала на выходе при определенной последовательности появления сигналов на ее входе. Например, при движении якоря по направлению, показанному стрелкой на фиг. 2, порядок появления сигналов на выходах фотоприемника будет такой, как показано на фиг. 4: 10-0-9-0"--10-0-9-0"-10-0.
Т. е. , очевидно, что после появления сигнала на фотоприемнике 9 следует кратковременная пауза -"0". Затем появляется сигнал на фотоприемнике 10, по длительности одинаковый с сигналом на фотоприемнике 9, и, наконец, относительная пауза -"0", соответствующая расположению участка 19 светоотражающей полосы якоря.
При движении якоря в противоположном направлении порядок следования сигналов сменяется на противоположный:
10-0"-9-0-10-0"-9-0-10.
В этом случае после сигнала фотоприемника 9 следует относительно длительная пауза -"0", затем уже вступает в работу фотоприемник 10, затем кратковременная пауза -"0", соответствующая вершинам треугольника отражающей полосы. Затем точно в такой же последовательности происходит появление логических "0" и "1" на трех входах логической схемы, которая реагирует лишь на одну последовательность из двух возможных. Отсутствие сигнала на выходе логической схемы свидетельствует о движении вторичного элемента в противоположную сторону.
Реверсивный счетчик 14 производит подсчет количества импульсов, пришедших на его входы, с учетом направления движения вторичного элемента (суммирование и вычитание) с целью определения текущей координаты вторичного элемента.
Цифроаналоговый преобразователь 16 служит для определения скорости перемещения вторичного элемента, а дифференцирующее звено 17 - для определения ускорения перемещения с учетом его направления. Управляющее устройство 18 определяет режим работы двигателя согласно заложенной программе путем изменения напряжения на обмотках 2 с помощью усилителя 20 (см. фиг. 3). (56) Патент США N 3917988, кл. 318-138, 1975.
Авторское свидетельство СССР N 805474, кл. H 02 K 29/100, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2166829C1 |
| ВИБРАТОР | 1994 |
|
RU2095925C1 |
| СПОСОБ РЕГИСТРАЦИИ И ВОСПРОИЗВЕДЕНИЯ ХАРАКТЕРА ПЕРЕМЕЩЕНИЯ ФРОНТА ВЗАИМОДЕЙСТВИЯ НОЖА РОТОРНОГО КОПРА С ИССЛЕДУЕМЫМ ОБЪЕКТОМ (СРЕДОЙ) И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1999 |
|
RU2173844C2 |
| ПОРШНЕВОЙ НАСОС | 2004 |
|
RU2257489C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2077108C1 |
| ГЕНЕРАТОР ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2143169C1 |
| ВИБРАТОР | 1994 |
|
RU2069442C1 |
| ПРИЕМОНАМАТЫВАЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2022900C1 |
| ИНДУКТОР ДЛЯ НАМАГНИЧИВАНИЯ ДЕТАЛЕЙ ИЗ МАГНИТОТВЕРДЫХ МАТЕРИАЛОВ | 1994 |
|
RU2072576C1 |
| БЕСКОНТАКТНЫЙ ПОТОЧНЫЙ МУТНОМЕР | 2003 |
|
RU2235310C1 |

Использование: в качестве управляемого электропривода и датчика отработки шагов в системах с импульсным управлением. Сущность изобретения: линейный электродвигатель содержит индуктор 1 с обмоткой 2, якорь, фотодатчик положения. Якорь снабжен светоотражающей полосой 7 с повторяющимися участками. Каждый участок содержит три элемента, два из которых равны между собой, расположены под углом друг к другу и к направлению продольной оси индуктора, а третий элемент параллелен продольной оси индуктора. Фотодатчик размещен на индукторе и состоит из фотоприемников 9 и 10 и излучателя 8, который расположен между ними. Расстояние между излучателем и фотоприемником равно проекции наклонного элемента светоотражающей полосы на продольную ось индуктора. Конструкция фотодатчика положения и изогнутая форма светоотражающей полосы позволяют расширить эксплуатационные возможности линейного двигателя путем определения направления перемещения якоря. 4 ил.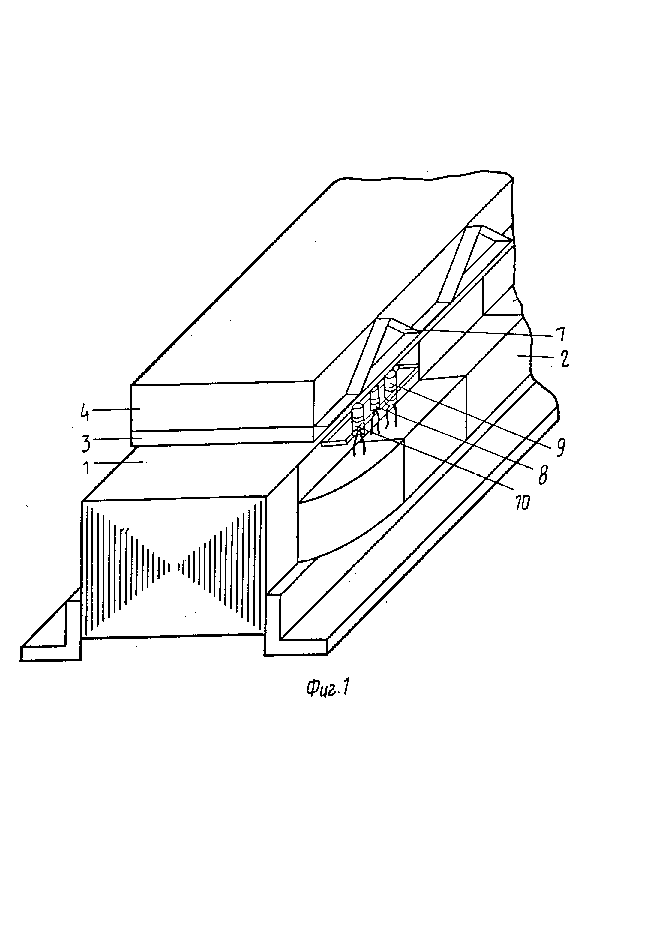
ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ, содержащий зубчатый индуктор с обмоткой, якорь, обращенный к зубцам индуктора, охваченным фазными катушками, фотодатчик положения, содержащий приемный элемент и излучатель, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем определения направления перемещения якоря, якорь снабжен светоотражающей полосой с повторяющимися участками, каждый из которых содержит три элемента, два из которых равны между собой, расположены под углом друг к другу и к направлению продольной оси индуктора, а третий элемент параллелен продольной оси индуктора, при этом излучатель размещен между приемными элементами, их оси параллельны между собой и перпендикулярны продольной оси индуктора, а расстояние между излучателем и приемными элементами равно проекции элементов светоотражающей полосы, расположенных под углом к продольной оси индуктора, на эту ось.
