Изобретение относится к приемно-наматывающим устройствам текстильных машин и машин для производства химических волокон и может быть использовано в текстильном производстве и производстве химических волокон.
Наиболее близким из известных является электроверетено прядильной машины, содержащее кинематически связанный со шпинделем ротор с вертикальной осью вращения в газомагнитном подвесе и размещенный по окружности концентрично ему статор, часть которого по его окружности выполнена в виде индуктора линейного двигателя, размещенного вдоль оси вращения шпинделя и подключенного к программному источнику напряжения.
Недостатками известного технического решения являются сложность конструкции статора, включающего индуктор линейного электродвигателя, и высокая энергоемкость перемещения, обусловленная необходимостью применения одновременно двух обмоток, одна из которых обеспечивает вращательное, а другая - возвратно-поступательное перемещение ротора.
Целью изобретения является упрощение конструкции приемно-наматывающего устройства при одновременном снижении энергоемкости намотки.
Указанная цель достигается тем, что индуктор выполнен в виде двух полуцилиндрических статоров, зеркально симметричных относительно плоскости, проходящей через ось вращения подвижного элемента, на рабочей поверхности обоих статоров под слоем немагнитного материала выполнены зубцы, расположенные по винтовым линиям с одинаковым шагом, причем зубцы на рабочей поверхности первого статора выполнены по винтовой линии правого направления, а зубцы на рабочей поверхности второго статора - по винтовой линии левого направления, в пазах магнитопроводов первого и второго статоров расположены m-фазные распределенные обмотки, каждая из которых подключена к m-фазному источнику напряжения регулируемой частоты через m управляемых ключей, управляющими входами соединенных с схемой автоматического управления, причем обмотки первого и второго статоров включены синфазно, а на рабочей поверхности реактивного подвижного элемента выполнены два винтовых зубца с шагом, совпадающим с шагом зубцов на рабочих поверхностях первого и второго статоров, один из которых расположен по винтовой линии правого направления, а другой - левого направления, причем промежутки между зубцами подвижного элемента заполнены немагнитным материалом с образованием гладкой рабочей поверхности.
Известное техническое решение, обеспечивая совмещение приемки и раскладки нити, обладает сложной конструкцией статора, включающего индуктор линейного электродвигателя. Кроме того, в известном решении совмещение вращательного и возвратно-поступательного движений ротора с паковкой обеспечивается одновременным подключением двух обмоток - статора и индуктора линейного двигателя - к двум различным источникам напряжения, что повышает энергоемкость намотки.
Заявляемое техническое решение обеспечивает совмещение вращательного и поступательного перемещений подвижного реактивного элемента с паковкой (совмещение приемки и раскладки нити) за счет введения винтовых зубцов на статоре и подвижном реактивном элементе при подключении к источнику напряжения одной распределенной обмотки одного полуцилиндрического статора, а возвратно-поступательное перемещение при неизменном направлении вращения - за счет применения двух попеременно включаемых зеркально симметричных статоров, отличающихся только направлением винтовых линий, по которым расположены зубцы, что упрощает конструкцию и снижает энергоемкость намотки.
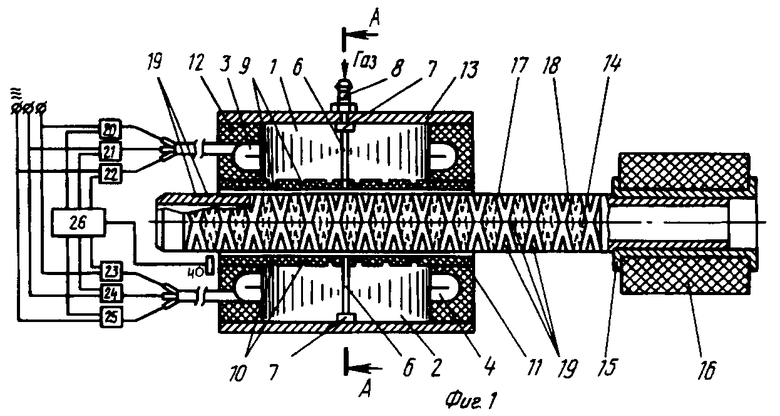
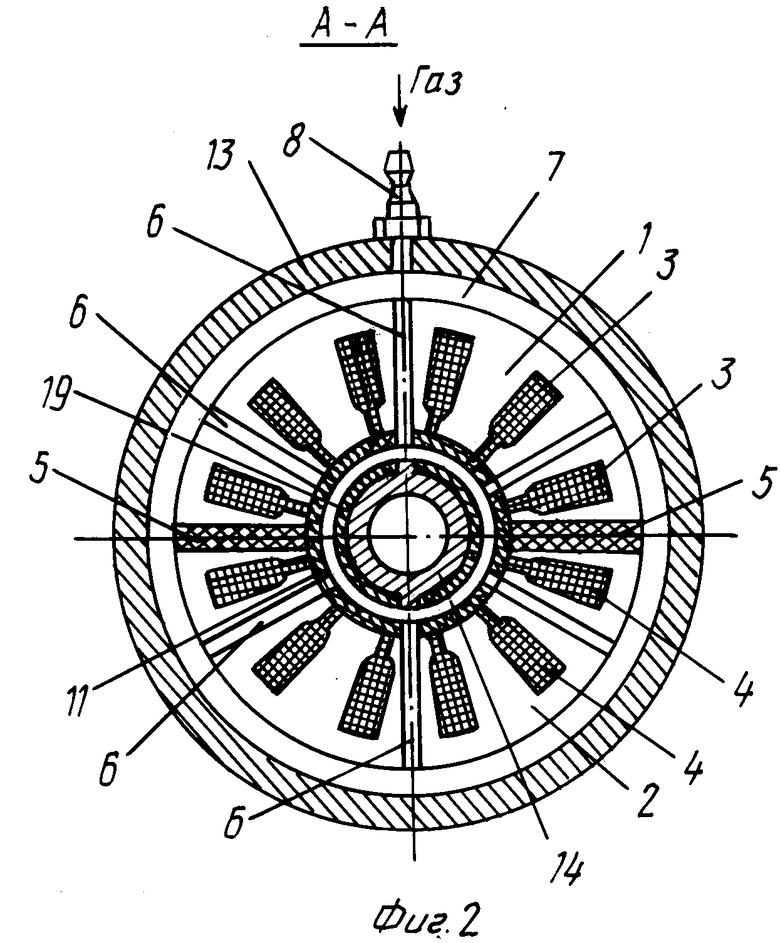
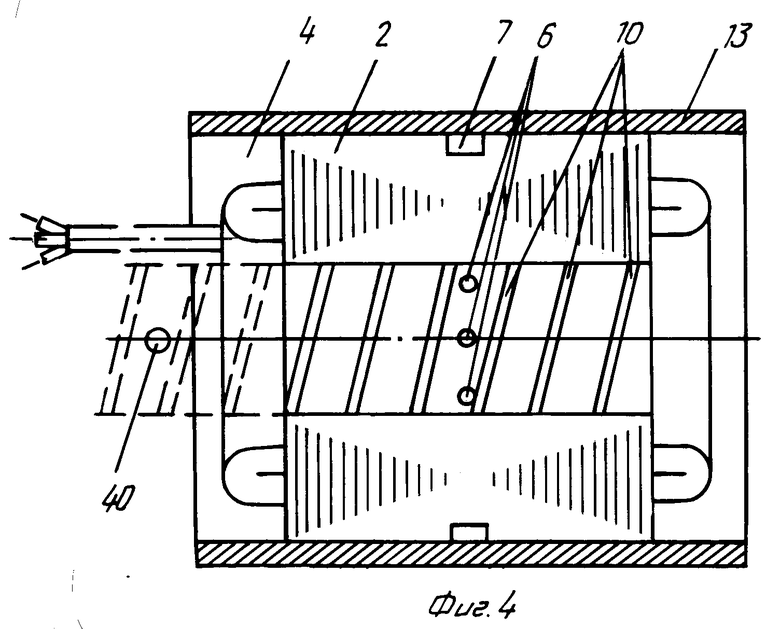
На фиг. 1 представлен общий вид приемно-наматывающего устройства; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 и 4 - рабочие поверхности первого и второго статоров индуктора; на фиг. 5 - структурная схема автоматического управления; на фиг. 6 - электрическая схема подключения обмоток первого и второго статоров; на фиг. 7 - структурная схема датчика положения подвижного элемента; на фиг. 8 - схема размещения датчика относительно винтовых зубцов подвижного элемента.
Приемно-наматывающее устройство содержит статоры 1 и 2 с полуцилиндрическими рабочими поверхностями и m-фазными распределенными обмотками 3 и 4 соответственно, уложенными в пазы шихтованных магнитопроводов статоров 1 и 2, прилегающих к немагнитным вкладышам 5 (фиг. 8) и образующих индуктор с внутренней цилиндрической расточкой. В магнитопроводах статоров 1 и 2 выполнены радиальные каналы 6 для подачи сжатого газа в рабочий зазор, соединенные с кольцевой распределительной канавкой 7 и штуцером 8 подачи газа. На рабочей поверхности статора 1 выполнены зубцы 9, расположенные по винтовой линии правого направления. На рабочей поверхности статора 2 выполнены зубцы 10, расположенные по винтовой линии левого направления. Зубцы 9 и 10 закрыты слоем 11 немагнитного материала на рабочей поверхности индуктора. Лобовые части обмоток 3 и 4 залиты диэлектрическим компаундом 12 для увеличения площади опорной поверхности газомагнитного подвеса. Образованный статорами 1 и 2 индуктор заключен в корпус 13.
В цилиндрической расточке индуктора расположен ферромагнитный подвижный реактивный элемент 14, на котором закреплена катушка 15 с паковкой 16. По всей длине рабочей поверхности подвижного реактивного элемента 14 выполнены винтовой зубец 17 правого направления и винтовой зубец 18 левого направления, промежутки между которыми закреплены немагнитным материалом 19 с образованием гладкой рабочей поверхности.
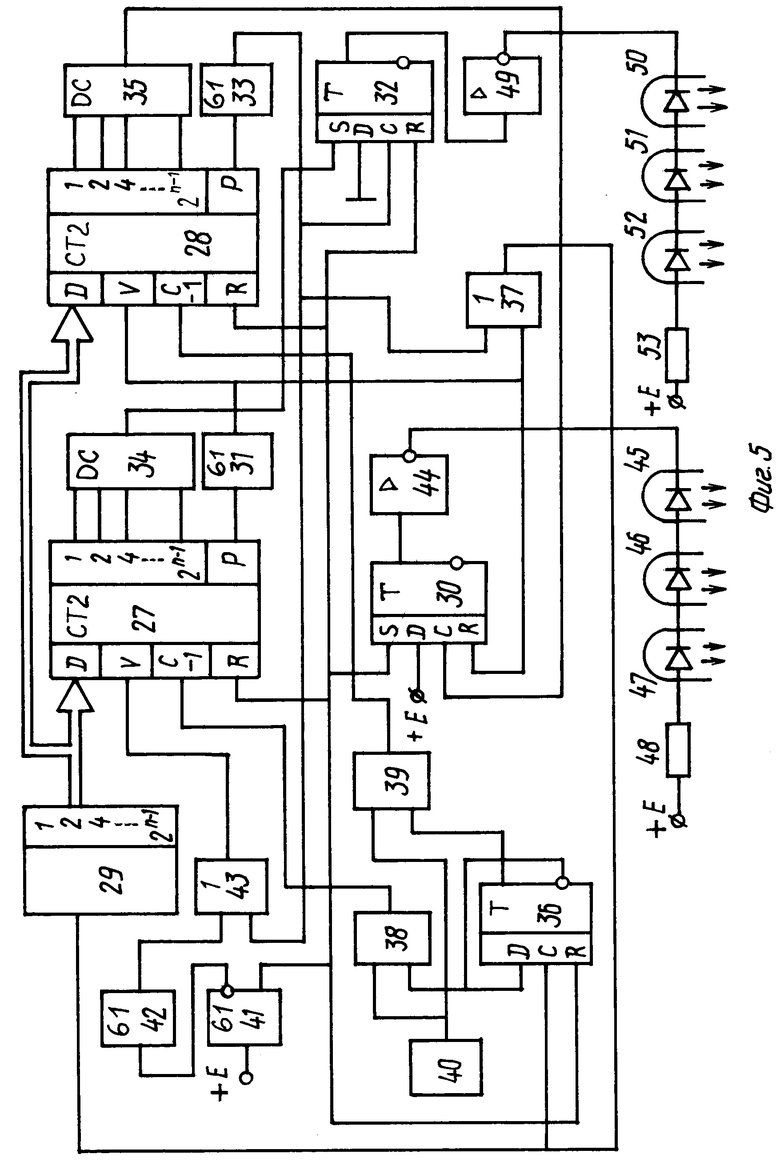
Распределенная m-фазная обмотка 3 статора 1 через управляемые силовые ключи 20 - 22 и m-фазная распределенная обмотка 4 статора 2 через управляемые силовые ключи 23 - 25 синфазно подключены к m-фазному источнику напряжения регулируемой частоты. Управляющие входы силовых ключей 20 - 25 соединены со схемой 26 автоматического управления, содержащей первый 27 (фиг. 5) и второй 28 вычитающие двоичные счетчики, задатчик 29 двоичного кода длины поступательного перемещения паковки 16, разрядные выходы которого шиной данных соединены с информационными D-входами в каждом разряде первого 27 и второго 28 двоичных счетчиков, первый D-триггер 30, информационным D-входом соединенный с источником питания схемы автоматического управления, установочным R-входом подключенный к выходу первого одновибратора 31, входом соединенного с P-выходом переполнения первого счетчика 27, второй D-триггер 32, информационным D-входом соединенный с нейтралью источника питания схемы автоматического управления, тактовым C-входом подключенный к выходу второго одновибратора 33, входом соединенного с P-выходом переноса второго счетчика 28, первый дешифратор 34, входами соединенный с разрядными выходами первого счетчика 27, а выходом соединенный с установочным S-входом второго D-триггера 32, второй дешифратор 35, входами соединенный с разрядными выходами второго счетчика 28, а выходом соединенный с тактовым C-входом первого D-триггера 30, третий D-триггер 36, тактовым C-входом соединенный с входом задатчика 29 двоичного кода длины перемещения паковки и с выходом первого двухвходового логического элемента ИЛИ 37, первым и вторым входами соединенного с выходами первого 31 и второго 33 одновибраторов, информационным D-входом соединенный со своим инверсным выходом и первым входом первого двухвходового логического элемента И 38, прямым выходом соединенный с первым входом второго двухвходового логического элемента И 39, причем вторые входы первого 38 и второго 39 элементов И соединены с выходом датчика 40 положения подвижного элемента, выходы первого 38 и второго 39 логических элементов И соединены соответственно со счетным C-входами первого 27 и второго 28 двоичных счетчиков, установочные R-входы первого 27 и второго 28 двоичных счетчиков, второго 32 и третьего 36 D-триггеров и установочный S-вход первого D-триггера 30 подключены к прямому выходу третьего одновибратора 41, входом соединенного с источником питания схемы автоматического управления, а инверсным выходом через четвертый одновибратор 42 соединенного с первым входом второго двухвходового логического элемента 43 ИЛИ, вторым входом соединенного с выходом второго одновибратора 33 и выходом соединенного с V-входом разрешения записи первого счетчика 27, причем V-вход разрешения записи второго счетчика 28 соединен с выходом первого одновибратора 31.
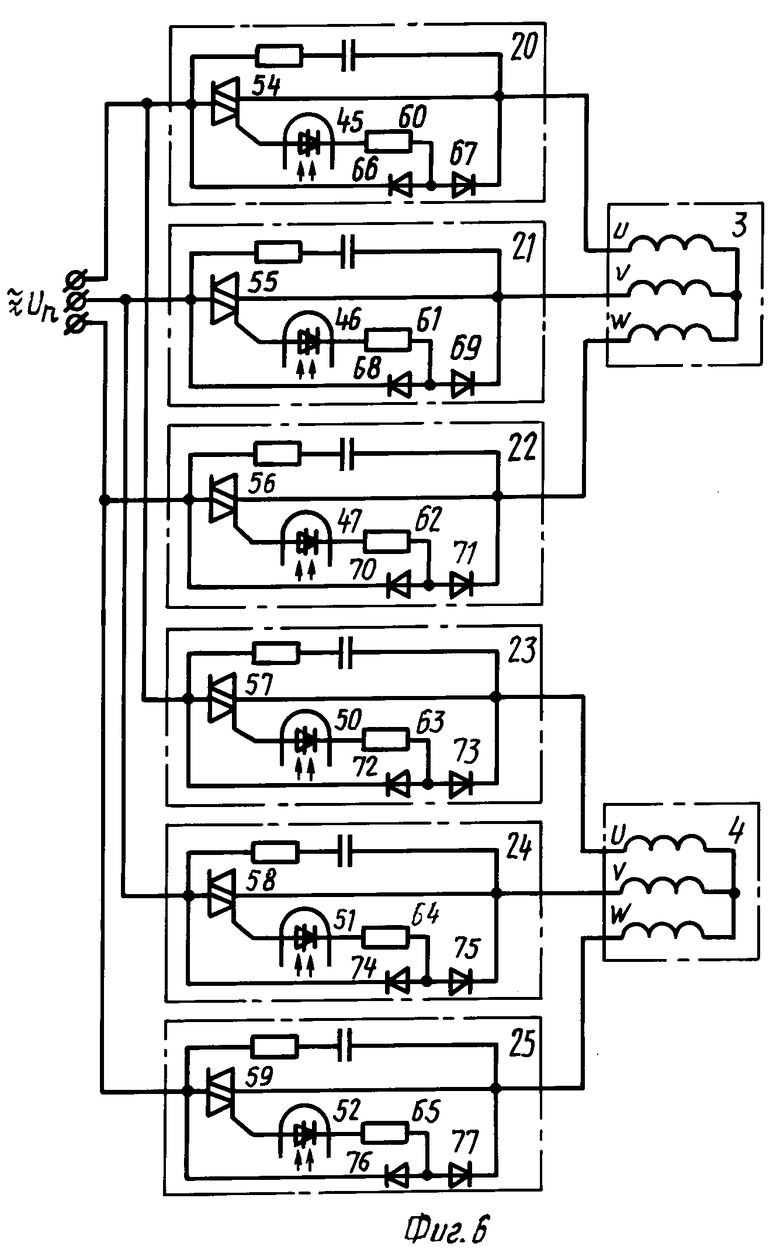
Прямой выход первого D-триггера 30 через усилитель-инвертор 44 соединен с катодом первого из трех последовательно соединенных диодных излучателей тиристорных оптронов 45 - 47, являющихся элементами гальванической развязки управляющих входов силовых ключей 20 - 22, причем анод диодного излучателя оптрона 47 через первый резистор 48 соединен с источником питания схемы автоматического управления. Аналогично прямой выход второго D-триггера 32 через усилитель-инвертор 49 соединен с катодом первого из трех последовательно соединенных диодных излучателей оптронов 50 - 52, являющихся элементами гальванической развязки управляющих входов силовых ключей 23 - 25, причем анод диодного излучателя оптрона 52 через второй резистор 53 соединен с источником питания схемы автоматического управления. Аноды тиристорных фотоприемников оптронов 45 - 47 и 50 - 52 соединены соответственно с управляющими электродами симисторов 54 - 56 и 57 - 59 силовых управляемых ключей 20 - 22 и 23 - 35, а катоды этих фотоприемников через резисторы 60 - 65 и соединенные анодами диоды 66 и 67, 68 и 69, 70 и 71, 72 и 73, 74 и 75, 76 и 77 - с анодами и катодами симисторов 45 - 47, 50 - 52 соответственно. При этом m-фазная распределенная обмотка 3 первого статора 1 подключена к источнику напряжения регулируемой частоты через симисторы 54 - 56 и управляется оптронами 45 - 47 и первым D-триггером 30, а m-фазная распределенная обмотка 4 второго статора 2 подключена синфазно к этому же источнику напряжения через симисторы 57 - 59 и управляется оптронами 50 - 52 и вторым D-триггером 32.
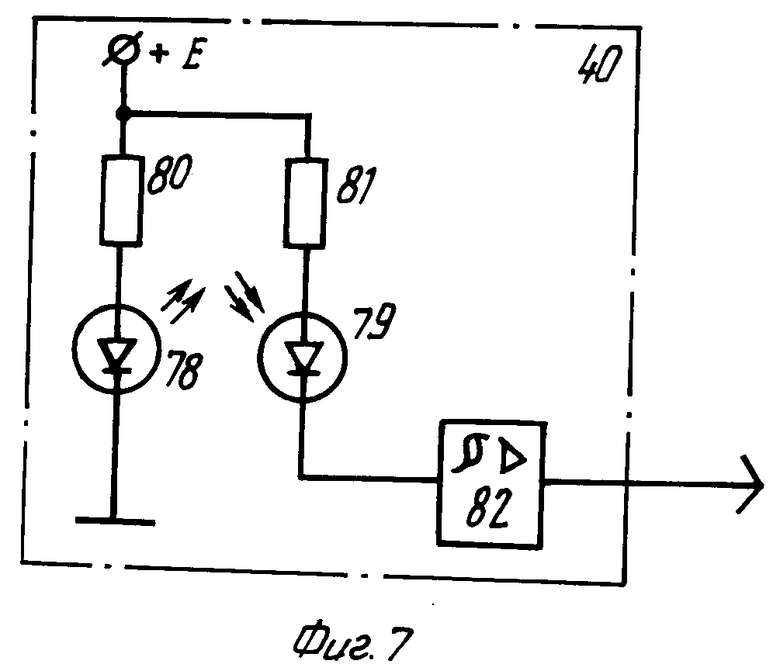
Датчик 40 положения подвижного элемента может быть выполнен магниточувствительным или оптроэлектронным. Оптоэлектронный датчик 40 положения (фиг. 7) содержит диодный инфракрасный излучатель 78 и фотодиод 79, аноды которых через резисторы 80 и 81 подключены к источнику питания схемы автоматического управления, причем катод диодного излучателя 78 подключен к нейтрали этого источника, а катод фотодиода 79 соединен с входом усилителя-формирователя 82, выход которого является выходом датчика 40. Датчик 40 расположен между витками винтовых линий правого и левого направлений, по которым расположены зубцы 17 и 18 подвижного элемента и зубцы 9 и 10 первого 1 и втоpого 2 статоров индуктора (фиг. 8).
Приемно-наматывающее устройство работает следующим образом.
При подаче сжатого газа через штуцер 8, кольцевую распределительную канавку 7 и радиальные каналы 6 в зазор между индуктором, образованным статорами 1 и 2, и реактивным подвижным элементом 14 последний всплывает в слое газовой смазки и вручную (грубо) устанавливается в исходное положение, при котором приемная катушка 15 максимально приближена к индуктору без касания с последним.
При подключении обмоток 3 и 4 статоров 1 и 2 индуктора к источнику постоянного напряжения зубцы 17 и 18 на подвижном элементе 14 вследствие шагового эффекта располагаются против зубцов 9 статора 1 и зубцов 10 статора 2 соответственно, чем достигается точная установка исходного положения элемента 14 и фиксация его исходного положения.
Одновременно при включении питания схемы автоматического управления третий одновибратор 41 (фиг. 5) вырабатывает и импульс, устанавливающий в единичное состояние (по установочному S-входу) первый D-триггер 30, чем обеспечивается излучение диодных излучателей оптронов 45 - 47. В то же время по установочному R-входу устанавливается в нулевое состояние второй D-триггер 32, чем блокируется излучение диодных излучателей оптронов 50 - 52. Тем же импульсом третьего одновибратора 41 по установочным R-входам устанавливаются в нулевое состояние третий D-триггер 36, первый 27 и второй 28 двоичные вычитающие счетчики. Срезом импульса третьего одновибратора 41 запускается четвертый одновибратор 42, импульс которого через второй логический элемент 43 ИЛИ поступает на V-вход разрешения записи счетчика 27, обеспечивая запись в счетчик двоичного числа, появляющегося на разрядных выходах задатчика 29 после включения питания и определяющего количество витков (длину) первого слоя намотки.
После заправки нити, отключения обмоток 3 и 4 статоров 1 и 2 от источника постоянного напряжения и подключения источника напряжения регулируемой частоты симисторы 54 - 56 (фиг. 6), к управляющим электродам которых подключены тиристорные фотоприемники оптронов 45 - 47, облучаемые своими диодными излучателями, подключают обмотку 3 статора 1 к источнику напряжения регулируемой частоты. Обмотка 4 статора 2 отключена от этого источника, так как диодные излучатели оптронов 50 - 52 находятся в неизлучающем состоянии, тиристорные фотоприемники этих оптронов и симисторы 57 - 59 выключены. При этом в статоре 1 возникает вращающееся магнитное поле, заставляющее подвижный элемент 14 с катушкой 15 перемещаться по винтовой траектории, совпадающей с винтовым зубцом 17 на подвижном элементе 14 и расположенными по винтовой линии зубцами 9 статора 1, причем за один оборот подвижный элемент 14 с приемной катушкой 15 смещается вдоль оси вращения на величину, равную шагу винтовой линии. Частота вращения и скорость линейного перемещения подвижного элемента 14 определяются при этом частотой источника напряжения и регулируются при регулировании частоты этого источника. Наличие немагнитного слоя на рабочей поверхности статора, определяя разделение по величине газового и магнитного зазоров (последний, превышая по величине газовой зазор, складывается из его величины и толщины немагнитного слоя), обеспечивает устойчивость газомагнитного подвеса подвижного элемента. Заливка лобовых частей статора диэлектрическим компаундом 12, увеличивая площадь опоры, обеспечивает увеличение жесткости и грузоподъемности газомагнитной опоры подвижного элемента 14.
При перемещении подвижного элемента 14 с приемной катушкой 15 по винтовой траектории, совпадающей с винтовым зубцом 17, датчик 40 положения подвижного элемента находится между витками винтового зубца 17 и пересекается витками винтового зубца 18, имеющего противоположное зубцу 17 направление навивки (фиг. 8). Учитывая различие в оптических свойствах отражающих поверхностей зубца 18 подвижного элемента 14 и немагнитного материала 19 в промежутках между зубцами (немагнитный материал обычно представляет собой эпоксидный компаунд, например УП-5-251 с отвердителем УП-0-633-П, и для большего различия отражающих оптических свойств может иметь в качестве наполнителя краситель, например, черного цвета), фотодиод 79 датчика 40, воспринимая создаваемый инфракрасным диодным излучателем 78 и отраженный от поверхности зубца 18 поток оптического излучения, вырабатывает импульс, формируемый и усиливаемый усилите- лем-формирователем 82 (фиг. 7) и поступающий на второй вход первого элемента И 38 (фиг. 5), на первый вход которого поступает уровень логической "1" с инверсного выхода третьего D-триггера 36, установленного в нулевое состояние при включении схемы. Таким образом, при каждом обороте подвижного элемента 14 с приемной катушкой 15 и одновременном их смещении вдоль оси вращения на величину шага винтового зубца 17 датчик 40 вырабатывает один импульс, поступающий через логический элемент И 38 на счетный C-вход первого вычитающего счетчика 27 и уменьшающий содержимое последнего на единицу.
Перед окончанием намотки первого слоя дешифратор 34, дешифрируя близкое к нулю двоичное число, записанное в этот момент в двоичный счетчик 27, вырабатывает сигнал, поступающий на S-вход второго D-триггера 32 и устанавливающий последний в единичное состояние. При этом включаются оптроны 50 - 52 и симисторы 57 - 59 (фиг. 6), распределенная обмотка 4 статора 2 подключается к источнику напряжения регулируемой частоты. Одновременное включение обмоток 3 и 4 статоров 1 и 2 обусловливает интенсивное торможение линейного перемещения подвижного элемента 14 с приемной катушкой 15 при неизменной частоты вращения последних.
После выполнения (в режиме торможения) последних, завершающих слой, витков первый счетчик 27 оказывается в нулевом состоянии, и его сигнал переполнения (с P-выхода) запускает первый одновибратор 31, импульс которого поступает на R-вход первого D-триггера 30, устанавливая его в нулевое состояние и выключая тем самым обмотку 3 статора 1, на V-вход разрешения записи второго двоичного счетчика 28, записывая в этот счетчик по его D-входам информацию задатчика 29 двоичного кода длины перемещения, через первый логический элемент ИЛИ 37 - на вход задатчика 29, вызывая на его разрядных выходах появление следующего двоичного кода длины перемещения (количество витков следующего слоя паковки), а также на тактовый C-вход третьего D-триггера 36, переводя его в единичное состояние и обеспечивая прохождение сигналов датчика 40 положения ротора на счетный вход C-второго счетчика 28.
Под действием магнитного поля статора 2, зубцов 10 этого статора и зубца 18 подвижного элемента 14, противоположных по направлению навивки зубцам 9 статора 1 и зубцу 17 подвижного элемента 14, последний вместе с приемной катушкой 15, не меняя направления вращения, начинает перемещаться в противоположную сторону вдоль оси вращения.
При перемещении подвижного элемента 14 с приемной катушкой 15 по винтовой траектории, совпадающей с винтовым зубцом 18, датчик 40 положения подвижного элемента находится между витками винтового зубца 18 и пересекается витками винтового зубца 17 с противоположным зубцу 18 направлением навивки. Сигналы датчика 40 поступают на второй вход второго логического элемента И 39, на первый вход которого поступает уровень логической "1" с прямого выхода третьего D-триггера 36 и через логический элемент И 39 на счетный C-вход второго двоичного счетчика 28, причем каждый сигнал датчика 40, соответствующий одному витку намотки, уменьшает содержимое счетчика 28 на единицу.
Перед окончанием намотки второго слоя дешифратор 35, дешифрируя близкое к нулю двоичное число, записанное в этот момент в счетчик 28, вырабатывает сигнал, поступающий на тактовый C-вход первого D-триггера 30 и устанавливающий последний в единичное состояние. При этом включаются оптроны 45 - 47 и симисторы 54 - 56 (фиг. 6), распределенная обмотка 3 статора 1 подключается к источнику напряжения регулируемой частоты, обуславливая интенсивное торможение линейного перемещения подвижного элемента 14 с приемной катушкой 15 при неизменной частоте вращения.
После выполнения (в режиме торможения) последних, завершающих слой, витков второй счетчик 28 оказывается в нулевом состоянии, и его сигнал переполнения (с P-выхода) запускает второй одновибратор 33, импульс которого поступает на тактовый C-вход второго D-триггера 32, устанавливая его в нулевое состояние и выключая тем самым обмотку 4 статора 2, на V-вход разрешения записи первого счетчика 27, записывая в этот счетчик информацию с разрядных выходов задатчика 29, через первый логический элемент ИЛИ 37 - на вход задатчика 29, вызывая на его разрядных выходах появление следующего двоичного кода длины перемещения (количества витков следующего слоя паковки), а также на тактовый C-вход третьего D-триггера 36, переводя его в нулевое состояние и обеспечивая прохождение сигналов датчика 40 положения ротора на счетный вход первого счетчика 27.
Дальнейшая работа приемно-наматывающего устройства аналогична описанной.
Таким образом, за счет введения двух попеременно включаемых схемой автоматического управления полуцилиндрических статоров с винтовыми зубцами противоположного направления на каждом из них и двух винтовых зубцов противоположного направления на реактивном подвижном элементе обеспечивается упрощение конструкции приемно-наматывающего устройства при одновременном снижении энергоемкости намотки, чем достигается цель изобретения и обеспечивается его положительный эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод бобинодержателя | 1988 |
|
SU1664903A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| ДИФРАКЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ РЯДА ОСНОВНЫХ ХАРАКТЕРИСТИК ТКАНИ И ТКАНЕПОДОБНЫХ МАТЕРИАЛОВ | 2001 |
|
RU2199739C2 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ НА БОБИНУ | 1992 |
|
RU2015099C1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИОННЫХ СВОЙСТВ ТРИКОТАЖНОГО ПОЛОТНА | 1993 |
|
RU2061239C1 |
| ЗАЖИМ К РАЗРЫВНОЙ МАШИНЕ ДЛЯ ИСПЫТАНИЯ ТЕКСТИЛЬНЫХ МАТЕРИАЛОВ | 2000 |
|
RU2173843C1 |
| УСТРОЙСТВО ВЕРТИКАЛЬНОЙ МЯГКОЙ НАМОТКИ НИТЕВИДНЫХ МАТЕРИАЛОВ | 1996 |
|
RU2110466C1 |
| СПОСОБ ПОЛУЧЕНИЯ ВОРСОВОЙ ПОВЕРХНОСТИ НА ОБЪЕМНОМ ИЗДЕЛИИ (ВАРИАНТЫ) | 2001 |
|
RU2199398C2 |
| СПОСОБ ПОЛУЧЕНИЯ 1,2,4-ТРИАЗОЛОНА-5 | 1992 |
|
RU2085556C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1994 |
|
RU2085839C1 |


Изобретение относится к приемно-наматывающим устройствам текстильных машин и машин для производства химических волокон и может быть использовано в текстильном производстве химических волокон. Сущность изобретения состоит в том, что в устройстве индуктор выполнен из двух полуцилиндрических статоров с винтовыми зубцами, реактивный элемент с винтовыми зубцами выполнен ферромагнитным и несущим приемную катушку с паковкой, обмотки каждого из полуцилиндрических статоров подключены к источнику напряжения регулируемой частоты через силовые ключи, управляющие входы которых соединены со схемой автоматического управления, чувствительным элементом которой является датчик положения реактивного элемента. 1 з.п.ф-лы, 8 ил.
| Электроверетено прядильной машины | 1986 |
|
SU1392155A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
