Изобретение относится к электротехнике, в частности к преобразовательной технике.
Известен способ получения внешней характеристики преобразователя, при котором измеряют текущие значения тока и напряжения нагрузки, вводят обратные связи по току и напряжению, сравнивают измеренное значение напряжения с заданным пороговым значением, если измеренное значение напряжения больше порогового. Вводят дополнительную обратную связь по напряжению, за счет чего выходная вольт-амперная характеристика имеет вид двух линейных участков с различными наклонами [1] .
Недостатком этого способа является низкая точность реализации регулирования внешней характеристики.
Наиболее близким является способ упраления преобразователем с регулируемой внешней характеристикой, при котором задают значения токов I1, I2, . . . , In+1 и напряжений U1, U2, . . . , Un+1, соответствующих граничным значениям n участков при ступенчатой аппроксимации регулируемой внешней характеристики, сравнивают Iр с граничными значениями участков и Uр с граничными значениями участков, определяют сопротивление нагрузки, сравнивают его с некоторым заданным значением сопротивления и при значении сопротивления, большем заданного, выбирают участок, где Im< <Ip< 1m+1, а при значении сопротивления меньше заданного выбирают участок, где Uk < Up < Uk+1. На выбранном участке, например, по току определяют рассогласование по регулируемому параметру, которым является в этом случае напряжение участка Um и изменяют регулирующий параметр, например угол отпирания тиристоров в сторону уменьшения рассогласования U, повторяя с интервалом квантования названные операции [2] .
Однако, и этот способ не обеспечивает требуемой точности воспроизведения регулируемой внешней характеристики вследствие использования ее ступенчатой аппроксимации.
Цель изобретения - повышение точности воспроизведения заданной регулируемой внешней характеристики.
Указанная цель достигается тем, что способе управления преобразователем с регулируемой внешней характеристикой, включающем задание значений токов I1, I2, . . . , Ij, . . . , In+1 и напряжений U1, U2, . . . , Uj, . . . , Un+1, (где j = 1, 2, . . . , n+1), соответствующих граничным значениям n участков, аппроксимирующих заданную внешнюю характеристику, измерение текущего значения тока и напряжения Up нагрузки, сравнение с заданными значениями текущих параметров Ip и Up, выбор по результатам равнения m-го участка, для которого Im < Ip< <Im+1, и k-го участка, для которого Uk < Up < < Uk+1, изменение регулирующего параметра, например угла отпирания тиристоров сторон уменьшения рассогласования регулируемого параметра и повторение указанных действий через период квантования, k-й и m-й участки выбирают одновременно, в качестве регулируемого берут параметр C = = Ac˙I + B˙U, где А = const, B = const, для чего задают каждого из n аппроксимирующих участков параметр С1, С2, . . . , Сj, . . . , Cn, равный Cj = Uj˙Ij+1-Uj+1˙Ij, для выбранных k-го и m-го участков определяют текущее значение параметра Сpk(m), где Cpk = = (Uk-Uk+1) ˙ Ip+(Ik+1-Ik)˙Up, Cpm = (Um- -Um+1)˙Ip+(1m+1-Im)˙Up, определяют величину рассогласования Cm и Ck, выбирают меньшее из них, например Ck, и изменяют регулирующий параметр в сторону уменьшения меньшего из рассогласований Сm и Ck.
Благодаря введению нового регулируемого параметра М и других указанных отличительных действий достигается более высокая точность воспроизведения регулируемой внешней характеристики по сравнению с прототипом, поскольку при такой совокупности действий достигается кусочно-линейная аппроксимация регулируемой внешней характеристики преобразователя.
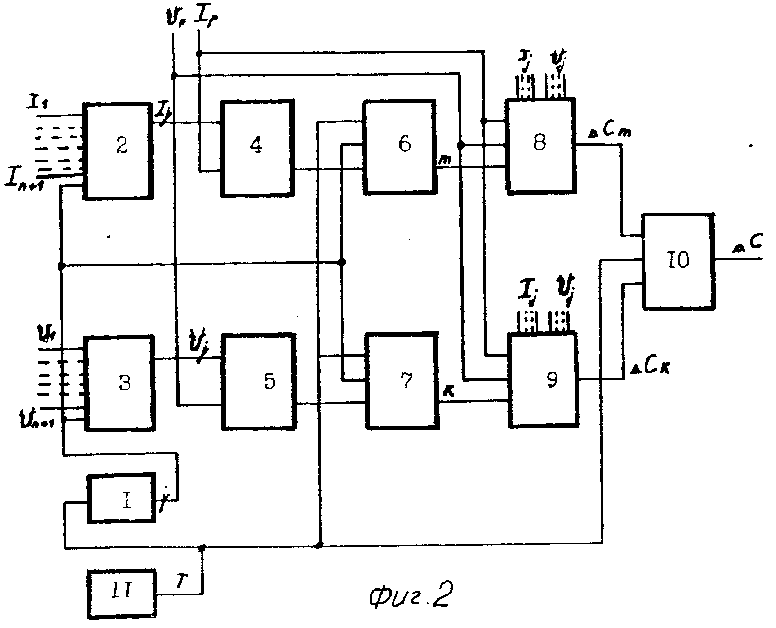
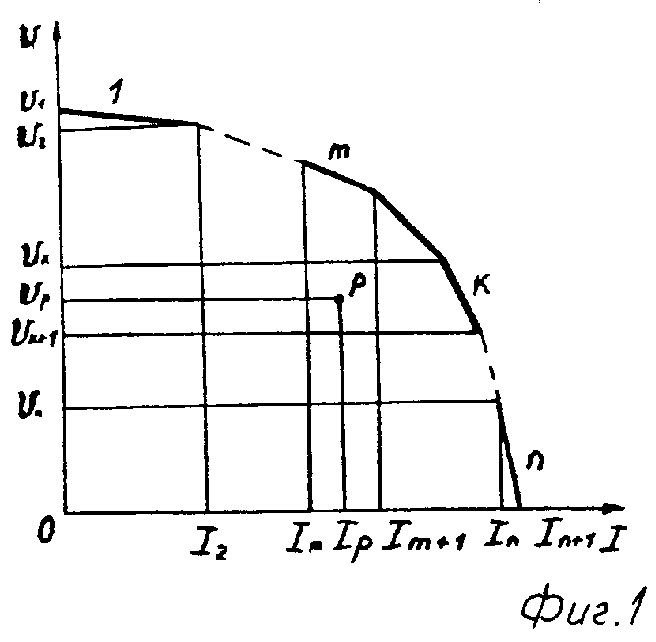
На фиг. 1 представлена заданная регулируемая внешняя характеристика преобразователя; на фиг. 2 - блок-схема устройства, реализующего предлагаемый способ.
Сущность способа состоит в следующем.
Форму регулируемой внешней характеристики задают, фиксируя значения токов I1, I2, . . . , In+1 и напряжений U1, U2, . . . , Un+1, где j = 1, 2, . . . , n+1, соответствующих граничным значениям n линейных участков, аппроксимирующих заданную внешнюю характеристику. После приема текущих значений тока Ip и напряжения Up нагрузки определяют, каким двум из всех участков регулируемой внешней характеристики соответствует положение рабочей точки преобразователя, для чего для определения номера m одного из участков поочередно производят сравнение значения тока нагрузки Ip со значениями токов Ij, пока не выполняется условие In < Ip < Im+1 (1)
Для определения номера k еще одного участка поочередно производят сравнение значения напряжения нагрузки Up со значениями напряжений Uj, пока не выполняется условие Uk < Up < Uk+1. (2)
После определения двух рабочих участков формируют обобщенный параметр Ср в рабочей точке Ip, Up, рассчитанный по отношению к двум выбранным участкам k и m:
Сpm = (Um-Um+1)˙Ip+ +(Im+1-Im)˙Up , (3)
Cpk = (Uk-Uk+1)˙Ip+ +(Ik+1-Ik)˙Up, (4) и величины обобщенного параметра, соответствующие попаданию рабочей точки преобразователя на m-й и k-й участки регулируемой внешней характеристики:
Cm = Um˙Im+1- -Um+1˙Im (5)
и Ck = Uk˙Ik+1-Uk+1˙Ik (6)
Определяют рассогласования для каждого из выбранных участков как Cm = Cm-Cpm (7)
и Ck = Ck-Cpk, (8) выбирают из них меньшее и передают как сигнал рассогласования для обработки регулятором, настроенным на стабилизацию обобщенного параметра. Перечисленные операции производят в течение одного интервала квантования и через интервал квантования повторяются.
Схема, реализующая предлагаемый способ, содержит счетчик участков 1, выходы которого соединены с управляющими входами коммутаторов 2 и 3, на информационные входы которых подаются заданные значения токов I1, I2, . . . , Ij, . . . , In+1 и напряжений U1, U2, . . . - Un+1 соответственно, а выход каждого соединен с входом компараторов 4 и 5, на другие входы которых подаются текущие значения измеренных тока Ip и напряжения Up, а выход каждого соединен о стробирующим входом регистров-защелок 6 и 7 соответственно, другие входы которых соединены с выходами счетчика участков 1, а выходы соединены с входами вычислителей 8 и 9 рассогласования соответственно, на другие входы которых подаются текущие значения тока Ip и напряжения Up и заданные значения токов и напряжений, а выход каждого соединения с входом схемы 10 сравнения, вход сброса которого соединен с выходом таймера 11, выход которого соединен также с входами сброса счетчика участков 1, компараторов 4 и 5 и схемы 10 сравнения.
Схема работает следующим образом.
Коммутаторы 2 и 3 последовательно передают значения Ij и значения напряжений Uj на границах линейных участков, аппроксимирующих регулируемую характеристику на схемы 4 и 5 сравнения. Схема 4 сравнения вырабатывает на выходе строб записи при выполнении условия (1), а схема 5 ранения - на выходе строб записи при выполнении условия (2). В регистрах-защелках 6 и 7 фиксируются номера K и m выбранных участков. Вычислитель 8, используя информацию о номере участков K, рабочих токе Ip и напряжении Up, согласно выражениям (3), (5) и (7) определяет значение рассогласования для k-го участка, вычислитель 9, используя информацию о номере участка m, рабочих токе Ip и напряжении Up, согласно выражениям (4), (6) и (8) определяет значение рассогласования для m-го участка. Схема 10 сравнения выбирает из двух рассогласований одно, имеющее меньшее значение, и передает его для отработки регулятору. Таймер 11 предназначен для синхронизации системы управления и обеспечения итеративного приближения к требуемой регулируемой внешней характеристике. (56) Гладков Э. А. Совершенствование процессами дуговой сварки на базе высокочастотных преобразователей энергии. Сварочное производство, 1984, N 3, с. 13-16.
Исхаков А. С. , Обухов С. Г. и Ушаков А. В. Управление внешней характеристикой источника электропитания. Электричество, 1990, N 11, с. 6 7-71.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ ВЫПРЯМИТЕЛЯ | 1998 |
|
RU2214674C2 |
| Способ регулирования мощности емкостной компенсации | 1988 |
|
SU1610541A1 |
| Способ формирования опорного напряжения | 1985 |
|
SU1343514A1 |
| Устройство для колебания сварочной горелки | 1989 |
|
SU1625616A1 |
| Способ ориентирования керна | 1988 |
|
SU1627684A1 |
| Система орошения | 1988 |
|
SU1535475A1 |
| Способ дискретно-интегрального регулирования тока источника питания газоразрядной технологической установки | 1991 |
|
SU1802875A3 |
| СПОСОБ И ПРИБОР ДЛЯ ХАРАКТЕРИЗАЦИИ ЛИНЕЙНЫХ СВОЙСТВ ЭЛЕКТРИЧЕСКОГО КОМПОНЕНТА | 2006 |
|
RU2383027C2 |
| Способ автоматического управления олефиновой установкой | 1985 |
|
SU1247395A1 |
| Выпрямительно-инверторный преобразователь электроподвижного состава | 1987 |
|
SU1623893A1 |
Способ основан на кусочно-линейной аппроксимации регулируемой внешней характеристики. Сравнивая текущие значения тока и напряжения нагрузки с заданными граничными значениями токов и напряжений линейных участков, определяют участки, в пределах которых лежат текущие значения тока и напряжения нагрузки. В качестве регулируемого используют параметр C = A X I + B X U, где A и B - есть постоянные для каждого участка величины. Определяя рассогласование ΔC для выбранных по току и напряжению участков, находят меньшее из них и изменяют регулирующий параметр, например, угол отпирания вентилей, в сторону уменьшения этого меньшего ΔC. 2 ил.
СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ С РЕГУЛИРУЕМОЙ ВНЕШНЕЙ ХАРАКТЕРИСТИКОЙ, заключающийся в том, что задают значения токов I1, I2, . . . , Ij. , . . . In+1 (где j = 1,2, . . . . , n + 1) и напряжений U1, U2, . . . , Uj, . . . , Un+1, соответствующих граничным значениям n участков, аппроксимирующих заданную регулируемую внешнюю характеристику, измеряют текущие значения тока Iр и напряжения Uр нагрузки и сравнивают их с заданными значениями этих параметров, выбирают по результатам сравнения m-й участок, для которого параметр Im<Ip<I, и k-й участок, для которого параметр Uk>Up>U , изменяют сигнал управления в сторону уменьшения рассогласования регулируемого параметра и повторяют указанные действия через период квантования, отличающийся тем, что, с целью повышения точности воспроизведения регулируемой внешней характеристики, сравнение текущих и заданных значений тока и напряжения производят одновременно, в качестве регулируемого используют параметр C = A · I + B · U, где A = const, B = const, для чего задают для каждого из участков параметр C1, C2, . . . Cj, . . . Cn, равный Cj = Uj · Ij-1 - Uj-1 · Ij, для выбранных k-го и m-го участков определяют текущее значение параметра Cрк(m), где Cрк = (Uk - Uk+1) · Ip + (Ik+1 - Ik) · Up, Cpm = (Um - Um+1) · Ip + (Im+1 - Im) · Up, определяют рассогласования регулируемого параметра Im<Ip<I выбирают меньшее из них и изменяют сигнал управления в сторону уменьшения наименьшего из рассогласований регулируемого параметра.
