Область техники, к которой относится изобретение
Изобретение относится к способу и прибору для характеризации линейных свойств электрического многопортового компонента. Оно также относится к способу моделирования электрической системы с по меньшей мере одним компонентом, охарактеризованным таким образом.
Уровень техники
Линейные свойства электрических компонентов с множеством портов обычно характеризуются одной из характеристических матриц, например импедансной матрицей или матрицей пропускания. Эти матрицы могут измеряться с помощью подходящей цепи.
В общем, все элементы характеристических матриц являются частотно зависимыми, а потому все измерения должны осуществляться для разных частот.
Обнаружено, что традиционные способы измерения могут обеспечить неудовлетворительные результаты из-за ограниченной точности измерительных приборов и электрического шума, в частности, если различные элементы или собственные значения характеристических матриц сильно различаются по величине. В этих случаях информация может быть потеряна. С другой стороны, взаимодействие между различными электрическими компонентами или подсистемами в системе может быть точно описано, только если свойства характеристических матриц хорошо известны.
Изобретение относится к ближайшему аналогу, раскрытому в статье Si. Fang, "Electrical modeling of main injector dipole magnets" [Электрическое моделирование дипольных магнитов топливных форсунок], Fermi National Accelerator Laboratory (March 17, 1995). Fang раскрывает прибор для характеризации линейных свойств пятипортового электрического компонента, который в этом случае представляет собой дипольный магнит. Прибор имеет источники напряжения и блоки восприятия тока для электрического измерения элементов матрицы полных проводимостей как функции частоты.
В пользовательском руководстве от Agilent Technologies, "Agilent 4155C/4156C Semiconductor Parameter Analyzer" [Анализатор параметров полупроводников]. Volume 1, General Information, Agilent Part No. 04156-90010, Edition 1 (January 2001), раскрывается прибор для характеризации линейных свойств электрического компонента с несколькими портами. Прибор имеет источники постоянного или импульсного питания, блоки слежения за током и дистанционный блок управления для автоматического измерения. Прибор выполняет как измерение, так и анализ результатов измерения.
Патент США №4.156.842 раскрывает систему для характеризации линейных свойств электрической сети, имеющей по меньшей мере один порт. Прибор использует генераторы высокочастотных сигналов и блоки восприятия напряжения и тока для автоматического измерения.
В статье Р. Guillaume et al., "Parametric Identification of Two-Port Models in the Frequency Domain" [Идентификация параметров двухпортовых моделей в частотной области], IEEE Instrumentation and Measurement Technology Conference, p.263-271, Vol.Conf. 8, Atlanta (May 14, 1991), раскрываются способ и прибор для характеризации линейных двухпортовых моделей. Входные и выходные напряжения и токи измеряются одновременно в интересующем частотном диапазоне. Представлен анализ данных измерений, в которых принимались меры по снижению шума и ошибок калибровки в данных входа-выхода.
В известных решениях выполняется единственная процедура измерений, и описываются способы улучшенного анализа для усовершенствованной оценки линейных свойств электрической системы.
Сущность изобретения
Следовательно, проблема, подлежащая разрешению настоящим изобретением, состоит в том, чтобы создать усовершенствованные способ и прибор для характеризации линейных свойств электрического компонента со многими портами. Эта проблема решается способом и прибором согласно настоящему изобретению.
Способ характеризации компонента с n>1 портов содержит «процедуру оценки», в которой оцениваемую матрицу Y' полных проводимостей определяют путем подачи напряжений на порты компонента и измерения отклика компонента. Процедура оценки может, к примеру, состоять из традиционного измерения матрицы Y' полных проводимостей путем подачи напряжения на один порт, заземления всех остальных портов, измерения тока в каждом порте и повторения этой процедуры для всех портов.
Способ далее содержит «процедуру измерения», в которой на порт подают несколько шаблонов u k напряжения. Шаблоны напряжения соответствуют собственным векторам v k оцениваемой матрицы Y' полных проводимостей, причем выражение «соответствуют» должно означать, что шаблон u k по существу (но не обязательно точно) параллелен (нормированному) собственному вектору v k и его соответствующему собственному значению λk. Для каждого приложенного шаблона u k напряжения измеряют отклик компонента.
Как обнаружено, приложение шаблонов u k напряжения, соответствующих собственным векторам матрицы полных проводимостей, позволяет получить более точное описание компонента, даже если собственные значения матрицы полных проводимостей значительно отличаются друг от друга.
Отклик прибора преимущественно измеряют путем измерения шаблона i k тока в портах для каждого приложенного шаблона u k напряжения.
Прибор согласно изобретению способен осуществлять этот тип измерения автоматически на приборе с n>1 портов.
В другом объекте изобретение относится к прибору, который способен автоматически определять линейный отклик компонента с n>2 портов посредством n генераторов напряжения для генерирования напряжения для каждого порта и n датчиков тока для восприятия тока в каждом порте, с помощью описанного здесь способа.
Отметим, что по всему тексту жирные заглавные буквы, такие как Y, используются для обозначения матриц, жирные строчные буквы, такие как u или u k, используются для обозначения векторов, а нежирные буквы, такие как λk, используются для обозначения скаляров или компонентов матриц или векторов.
Что касается упоминания «линейных свойств» компонента, то этот термин должен пониматься как охватывающий любое свойство, которое точно линейно или близко к линейному, пока свойство удовлетворяет математическим соотношениям, очерченным ниже, с достаточной точностью в диапазоне представляющих интерес токов и напряжения.
Краткое описание чертежей
Дальнейшие варианты осуществления, преимущества и применения изобретения даются в зависимых пунктах, а также в нижеследующем подробном описании со ссылкой на чертежи:
фиг.1 представляет собой условную иллюстрацию компонента, для которого выполняют характеризацию;
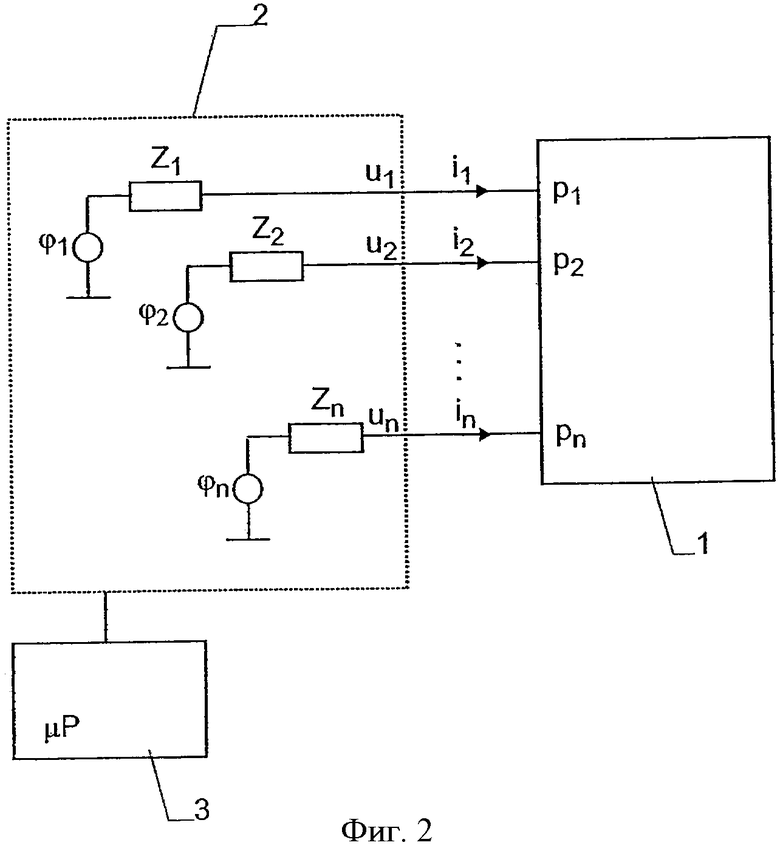
фиг.2 представляет собой токовую блок-схему для измерительного прибора для характеризации компонента;
фиг.3 представляет собой первый вариант осуществления измерительного прибора, и
фиг.4 представляет собой второй вариант осуществления измерительного прибора.
Подробное описание
Общий принцип измерений
Фиг.1 показывает многопортовый компонент 1 с n>1 портов от p1 до рn. Когда к портам p1-рn прикладывают линейные напряжения u1-uk, то текут токи i1-in. Линейный электрический отклик компонента 1 характеризуется его матрицей Y или, что эквивалентно, его матрицей импедансов. В записи полной проводимости, приложение вектора u=(u1…un) напряжений к портам p1-рn генерирует токовый вектор i=(i1…in), при этом:

Общий принцип измерения согласно настоящему изобретению основан на процедуре оценки и процедуре измерения. В процедуре оценки определяется оцениваемая матрица Y', в процедуре измерения осуществляется более точное измерение.
В процедуре оценки элементы оцениваемой матрицы Y' полных проводимостей могут быть, например, измерены непосредственно с помощью традиционных способов. Диагональные элементы Y'ii могут, к примеру, измеряться путем приложения напряжения к порту рi и измерения тока ii в том же порте, когда все остальные порты закорочены на нулевое напряжение, т.е. Y'ii=ii/ui при uj=0 для i≠j. Остальные элементы Y'ij матрицы можно измерять путем подачи напряжения uj на порт рj при установке всех остальных портов на ноль вольт и измерении тока ij в порте рj, Y'ij=ij/ui при uj=0 для i≠j.
Можно также использовать другие традиционные способы для измерения оцениваемой импедансной матрицы Y' в процедуре оценки.
В общем, оцениваемая матрица Y' полных проводимостей имеет n собственных значений λ1…λn и n соответствующих (нормированных) собственных векторов v 1…v n, для которых

Когда оцениваемая матрица полных проводимостей известна, ее собственные векторы v k можно вычислить.
В процедуре измерения, следующей за процедурой оценки, несколько (в общем n) шаблонов u k=(u1k…unk) напряжений прикладывают к портам p1…рn компонента 1. Каждый шаблон u k напряжения соответствует одному из собственных векторов v k. Для каждого приложенного шаблона u k напряжения измеряют отклик компонента, в частности путем измерения шаблона i k наведенного тока.
Как упомянуто выше, шаблон u k напряжения соответствует (нормированному) собственному вектору v k (который представляет собой один из n нормированных собственных векторов матрицы полных проводимостей), а именно в том смысле, что шаблон u k напряжения по существу параллелен собственному вектору v k, соответствующему собственному значению λk. Теоретически, при u k∝v k решение было бы наилучшим, но прибор, генерирующий шаблоны u k напряжения, будет, в общем, неспособен генерировать шаблоны напряжения, точно совпадающие с собственными векторами из-за ошибок дискретизации. Способы обращения с приборами с ограниченным разрешением для генерирования шаблонов напряжения будут рассмотрены ниже.
Когда процедура измерения завершена, шаблоны u k напряжения и соответствующие шаблоны i k тока полностью характеризуют линейный отклик компонента 1.
В общем, матрица Y полных проводимостей является частотно зависимой. Для полного моделирования поведения компонента 1 в сети необходимо знать линейный отклик компонента 1 для расширенного частотного диапазона, к примеру, от 50 Гц до нескольких МГц. По этой причине процедуру оценки выполняют на множестве частот ωi в заданном диапазоне.
Преимущественно, для каждой процедуры оценки вычисляются собственные значения λk(ωi) при заданной частоте ωi. Затем определяются наиболее критические частоты, которые представляют собой частоты, где собственные значения достигают локального максимума или минимума, либо, в частности, где абсолютное соотношение между наибольшим и наименьшим собственными значениями имеет максимум или превышает заданный порог. Эти критические частоты представляют особый интерес, либо потому, что они указывают резонанс компонента 1, либо потому, что они показывают, что некоторые из оцененных собственных значений могут иметь неудовлетворительную точность и для увеличения этой точности требуется описанная процедура измерения.
Принципиально возможно разделить желательный частотный диапазон на несколько частотных интервалов и вычислить наиболее критические частоты в каждом частотном интервале.
Для каждой или по меньшей мере для некоторых критических частот описанную выше процедуру измерения выполняют для уточнения измерения. В дополнение к этому или альтернативно, процедуру измерения можно выполнять для других точек в частотном диапазоне, представляющем интерес.
Частоты ωi, где выполняются измерения, могут быть распределены линейно по диапазону частот или логарифмически по диапазону частот, представляющему интерес. В преимущественном варианте осуществления, впрочем, плотность частот ωi измерения вблизи вышеупомянутых критических частот больше, чем плотность частот ωi измерения в спектральных диапазонах вдали от критических частот. Это позволяет получить более надежную характеризацию компонента.
Измерительный прибор
Измерительный прибор 2 для осуществления изобретения раскрывается на фиг.2. В наиболее общем случае измерительный прибор 2 содержит n источников регулируемого напряжения, генерирующих напряжения φ1-φn, которые подают на порты pi-рn через импедансы z1-zn. Напряжения φ1-φn все имеют равную частоту и известное фазовое соотношение. Импедансы z1-zn могут быть практически нулевыми или, как описано выше, они могут быть регулируемыми и потенциально ненулевыми. Блок 3 управления предусматривается для автоматической регулировки источников напряжения и, если это применимо, импедансов z1-zn.
Для прибора, показанного на фиг.2, имеем

где φ=(φ1…φn) - напряжения источников напряжения, u=(u1…un) - входные напряжения на портах, a Z представляет собой диагональную матрицу с диагональными элементами Z1-Zn.
Объединение уравнений (1) и (3) дает нижеследующее соотношение между входными напряжениями и приложенными напряжениями:

где I - единичная матрица размером n×n.
Как упомянуто выше, приложенные напряжения u должны соответствовать собственным значениям v k оцениваемой матрицы Y' полных проводимостей. В общем, однако, не будет возможным выполнить это условие точно, потому что источники напряжения не будут способны генерировать какие-либо произвольные значения напряжения, а только дискретный набор значений. Если число значений напряжения, которые можно генерировать, мало, импедансы z1-zn можно рассчитать для регулировки, а также для получения большего числа различных входных напряжений u.
Вектор u k входных напряжений может быть выражен как линейная комбинация собственных значений v i, т.е.
Объединение уравнений (5), (1) и (2) дает
Следовательно, чтобы максимизировать влияние k-го собственного значения на вектор i входного тока пропорционально остальным собственным значениям, должна быть минимизирована следующая функция ошибок
Иными словами, для каждого собственного значения λk должны быть найдены коэффициенты α1…αn (из набора возможных коэффициентов, который представляет собой конечный набор вследствие дискретизации, присущей измерительному прибору 2), для которых выражение уравнения (6) будет наименьшим.
Если измерительный прибор 2 имеет регулируемые источники напряжения и импедансов, как показано на фиг.2, имеем:

Измерительный прибор для осуществления приведенного выше способа должен, в общем, содержать n генераторов напряжения, которые программируются для приложения шаблона u напряжения к n портам прибора 1. Далее, он должен содержать n датчиков тока для измерения токов i. Он должен быть приспособлен для автоматической подачи по меньшей мере n подходящих шаблонов напряжения последовательно для измерения линейного отклика компонента. Это особенно выгодно для компонентов 1 с более чем двумя портами, потому что использование этого вида автоматического измерения на компонентах с n>1 портами обеспечивает значительные выигрыши в скорости и точности при снижении стоимости.
Преимущественно измерительный прибор должен содержать блок управления для осуществления измерения с помощью очерченных выше процедур оценки и измерения.
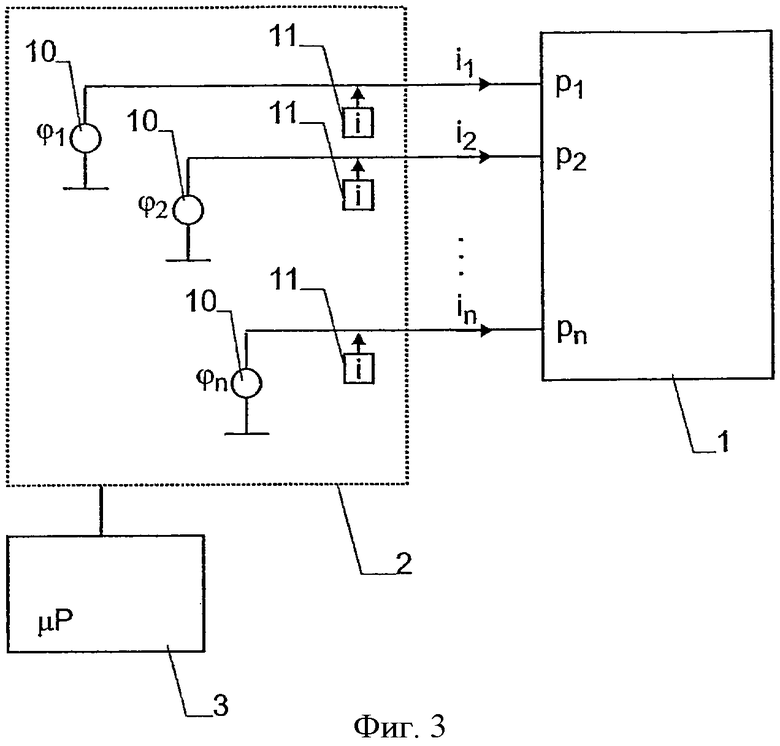
Один возможный вариант осуществления измерительного прибора 2 показан на фиг.3. В этом приборе для каждого входного порта предусматривается генератор 10 напряжения для генерирования отдельного напряжения φi с регулируемыми амплитудой и фазой. Он также содержит n датчиков 11 тока, по одному для измерения тока в каждом порте или из каждого порта. Блок 3 управления способен устанавливать прикладываемое входное напряжение непосредственно путем управления генераторами 10 напряжения. Если число значений напряжения, которые могут генерироваться каждым генератором напряжения, мало, оптимальное напряжение для заданного собственного значения может быть вычислено путем минимизации выражения в уравнении (6). Для каждого приложенного шаблона напряжения блок 3 управления измеряет токи i через порты посредством датчиков 11 тока.
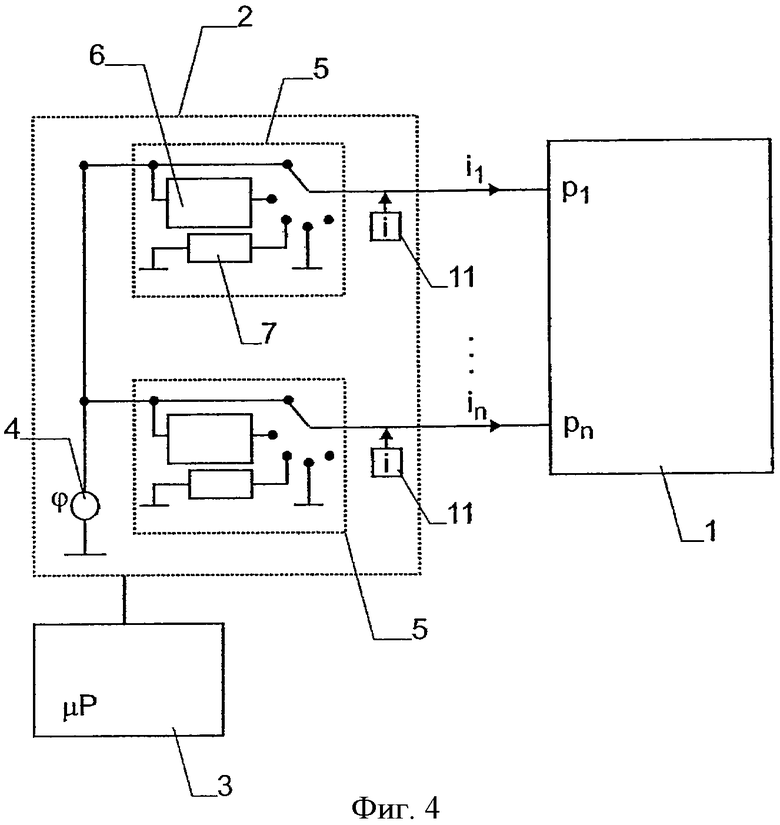
Другой возможный вариант осуществления измерительного прибора показан на фиг.4. Этот прибор содержит только один источник 4 напряжения. Напряжение φ от источника напряжения подается в n преобразователей 5 напряжения, управляемых блоком 3 управления, причем источник 4 напряжения и преобразователи 5 напряжения используются вместо генераторов 11 напряжения предыдущего варианта осуществления. Каждый преобразователь 5 напряжения избирательно подсоединяет один порт к напряжению φ непосредственно, к напряжению φ через демпфирующую цепь 6, к заземлению через импеданс 7, к заземлению непосредственно, или оставляет порт открытым (бесконечный импеданс). Эта измерительная схема имеет преимущество в том, что она требует только один источник напряжения. Подходящие установки преобразователей напряжения для каждого значения можно вычислить из уравнений (6) и (7).
Дальнейшая обработка результатов
Как упомянуто выше, описанная процедура измерения дает для заданной частоты набор шаблонов u k напряжения и соответствующих шаблонов i k тока, которые полностью характеризуют линейный отклик компонента 1 на заданной частоте.
Значения u k и i k для k=1…n можно в принципе преобразовать в более точную оценку матрицы Y полных проводимостей или соответствующую импедансную матрицу. Однако, если наименьшее и наибольшее собственные значения матрицы Y полных проводимостей отличаются на несколько порядков по величине, такую матрицу трудно численно обрабатывать с использованием вычислений с плавающей запятой из-за ошибок округления и ограниченной точности численных алгоритмов. Следовательно, в преимущественном варианте осуществления настоящего изобретения значения u k и i k используются непосредственно для дальнейшей обработки без предварительного преобразования в матрицу Y полных проводимостей или импедансов.
Например, результаты процедуры измерения можно использовать для моделирования электрических свойств компонента 1 или сети, частью которой является компонент 1. Такая модель может, к примеру, использоваться для анализа стабильности сети в общем или ее откликов на заданные события в частности.
Описанный здесь способ можно использовать для характеризации различных компонентов, таких как электродвигатели, трансформаторы, переключатели, линии передачи и т.п.
Перечень ссылочных позиций
1 - тестируемый компонент
2 - измерительное устройство
3 - блок управления
4 - единственный источник напряжения
5 - преобразователь напряжения
6 - демпфирующая цепь
7 - импеданс
10 - генератор напряжения
11 - датчик тока
| название | год | авторы | номер документа |
|---|---|---|---|
| ИТЕРАЦИОННЫЙ СПОСОБ ХАРАКТЕРИЗАЦИИ ЧАСТОТНОЙ ЗАВИСИМОСТИ ЛИНЕЙНЫХ СВОЙСТВ ЭЛЕКТРИЧЕСКОГО КОМПОНЕНТА | 2007 |
|
RU2423715C1 |
| ПРИНУДИТЕЛЬНОЕ ОСУЩЕСТВЛЕНИЕ ПАССИВНОСТИ В ЭЛЕКТРОННЫХ КОМПОНЕНТАХ ПУТЕМ МОДАЛЬНЫХ ВОЗМУЩЕНИЙ | 2007 |
|
RU2450348C2 |
| ЦИФРОВОЙ СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПЬЕЗОЭЛЕКТРИЧЕСКИХ ЭЛЕМЕНТОВ | 2014 |
|
RU2584719C1 |
| СИСТЕМА И СПОСОБ РЕКОНСТРУКЦИИ С ИСПОЛЬЗОВАНИЕМ "МЯГКОГО ПОЛЯ" | 2012 |
|
RU2590321C2 |
| УСТРОЙСТВО, СИСТЕМА (ВАРИАНТЫ), СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О НАПРАВЛЕНИИ И КОМПЬЮТЕРНЫЙ ПРОГРАММНЫЙ ПРОДУКТ | 2011 |
|
RU2555188C2 |
| Способ классификации биологических объектов на основе многомерного биоимпедансного анализа и устройство для его реализации | 2020 |
|
RU2752594C1 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ГОРЕНИЕМ В ГОРЕЛКЕ РАБОТАЮЩЕГО НА ГАЗООБРАЗНОМ ТОПЛИВЕ УСТРОЙСТВА И СИСТЕМА УПРАВЛЕНИЯ ГОРЕНИЕМ, РАБОТАЮЩАЯ В СООТВЕТСТВИИ С УПОМЯНУТЫМ СПОСОБОМ | 2013 |
|
RU2640866C2 |
| СЛЕДЯЩЕЕ УСТРОЙСТВО ДЛЯ ТОКОВОЙ ЛОКАЛИЗАЦИИ | 2009 |
|
RU2527152C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ АНИЗОТРОПИИ ЭЛЕКТРИЧЕСКОЙ ПРОВОДИМОСТИ БИОТКАНЕЙ | 2012 |
|
RU2504328C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ КОМПОЗИТНЫХ МАТЕРИАЛОВ С ИСПОЛЬЗОВАНИЕМ РАДИОЧАСТОТНОГО ОТРАЖЕНИЯ | 2011 |
|
RU2540411C2 |
Изобретение относится к способу и прибору для характеризации линейных свойств электрического многопортового компонента. Техническим результатом является измерение точности линейного отклика компонента, даже если собственные значения матрицы полных проводимостей отличаются на несколько порядков по величине. Способ характеризации линейных свойств электрического компонента (1), имеющего n>1 портов (p1…pn), включает в себя: процедуру оценки, содержащую этап, на котором определяют оцениваемую матрицу Y' полных проводимостей компонента (1) путем приложения напряжений к портам (p1…pn) и измерения отклика упомянутого компонента (1). Причем способ включает в себя процедуру измерения, содержащую этап приложения нескольких шаблонов u
k напряжения к портам (р1, …, pn) компонента (1), причем каждый шаблон u
k напряжения соответствует собственному вектору v
k указанной оцениваемой матрицы Y полных проводимостей, и определения отклика компонента (1) для каждого приложенного шаблона u
k напряжения. Способ моделирования электрической системы и два варианта приборов для характеризации линейных свойств электрического компонента реализуются по вышеуказанному способу. 4 н. и 24 з.п. ф-лы, 4 ил.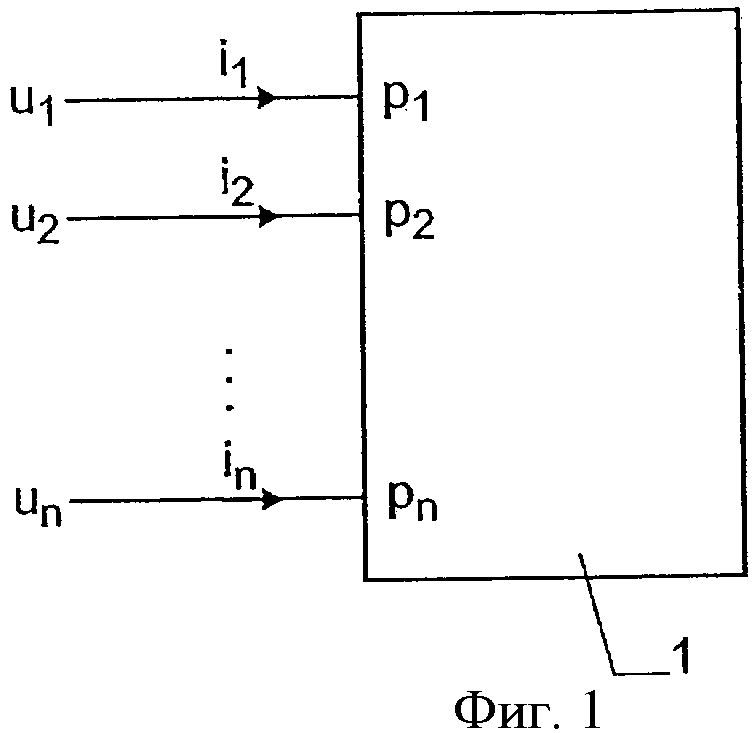
1. Способ характеризации линейных свойств электрического компонента (1), имеющего n>1 портов (p1…pn), включающий в себя:
процедуру оценки, содержащую этап, на котором определяют оцениваемую матрицу Y' полных проводимостей компонента (1) путем приложения напряжений к портам (p1…pn) и измерения отклика упомянутого компонента (1),
отличающийся тем, что включает в себя процедуру измерения, содержащую этап приложения нескольких шаблонов uk напряжения к портам (р1, …, pn) компонента (1), причем каждый шаблон uk напряжения соответствует собственному вектору vk указанной оцениваемой матрицы Y' полных проводимостей, и определения отклика компонента (1) для каждого приложенного шаблона uk напряжения.
2. Способ по п.1, в котором процедура измерения содержит этап измерения щаблона ik тока на портах (р1, …, pn) для каждого шаблона uk напряжения, приложенного к указанным портам (р1, …, pn).
3. Способ по п.1, в котором оцениваемая матрица Y' полных проводимостей имеет n собственных векторов (v1, …, vn), и каждый шаблон uk напряжения соответствует отличающемуся собственному вектору vk.
4. Способ по п.1, в котором шаблон uk напряжения, по существу, параллелен собственному вектору vk, при этом шаблоны uk напряжения и собственные векторы vk совпадают не точно вследствие ошибок дискретизации в тестовом приборе (3, 2), генерирующем шаблоны uk напряжения.
5. Способ по любому из пп.1-4, в котором шаблоны uk напряжения генерируют с помощью тестового прибора (3, 2), выполненного с возможностью прикладывать к портам (р1, …, pn) дискретный набор различных шаблонов uk напряжения, при этом каждый шаблон uk напряжения соответствует элементу указанного набора, который имеет свойство, состоящее в том, что выражение
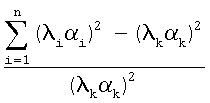
является минимальным, при этом λ1, …, λn - n собственных значений оцениваемой матрицы Y' полных проводимостей и
с коэффициентами αi.
6. Способ по п.5, в котором тестовый прибор (3, 2) имеет n генераторов (10) напряжения, которые программируют для приложения шаблона uk напряжения к указанным портам, при этом n генераторов (10) напряжения генерируют n различных напряжений φk, которые прикладывают к портам (р1, …, pn) через выборочные импедансы Zk, при этом
α=[v1…vn]-1·(I+Z·Y')-1·φ,
где α - вектор коэффициентов α1-αn, I - единичная матрица n×n, Z - диагональная матрица с диагональными элементами Zk, а φ - вектор с элементами φ1-φk.
7. Способ по п.5, в котором тестовый прибор (3, 2) содержит один источник напряжения (4), напряжение φ от которого подают в n управляемых преобразователей (5) напряжения.
8. Способ по любому из пп.1-4, содержащий этапы, на которых: повторяют процедуру оценки на множестве частот по частотному диапазону, представляющему интерес; и
осуществляют процедуру измерения для по меньшей мере некоторых частот.
9. Способ по п.8, в котором определяют наиболее критические частоты, на которых собственные значения оцениваемой матрицы Y' полных проводимостей достигают локального максимума или минимума, и по меньшей мере на критических частотах осуществляют процедуру измерения для уточнения измерения.
10. Способ по п.8, содержащий этап, на котором определяют критические частоты, при этом плотность измерений, близких к критическим частотам, больше, чем число измерений вдали от указанных критических частот.
11. Способ по п.10, в котором желательный частотный диапазон разделяют на несколько частотных окон, и наиболее критические частоты вычисляют в каждом частотном окне.
12. Способ по любому из пп.1-4, в котором приложенные шаблоны uk напряжения и шаблоны ik тока используют непосредственно для дальнейшей обработки без предварительного преобразования в матрицу Y проводимостей или импедансов.
13. Способ по любому из пп.1-4, в котором компонент (1) представляет собой электродвигатель, трансформатор, переключатель или передающую линию.
14. Способ по п.5, содержащий этапы, на которых:
повторяют процедуру оценки на множество частот по частотному диапазону, представляющему интерес;
осуществляют процедуру измерения для по меньшей мере некоторых частот.
15. Способ по п.6, содержащий этапы, на которых:
повторяют процедуру оценки на множество частот по частотному диапазону, представляющему интерес; и
осуществляют процедуру измерения для по меньшей мере некоторых частот.
16. Способ по п.9, содержащий этап, на котором определяют критические частоты, при этом плотность измерений, близких к критическим частотам, больше, чем число измерений вдали от указанных критических частот.
17. Способ по п.5, в котором приложенные шаблоны uk напряжения и шаблоны ik тока используют непосредственно для дальнейшей обработки без предварительного преобразования в матрицу Y проводимостей или импедансов.
18. Способ по п.6, в котором приложенные шаблоны uk напряжения и шаблоны ik тока используют непосредственно для дальнейшей обработки без предварительного преобразования в матрицу Y проводимостей или импедансов.
19. Способ моделирования электрической системы с по меньшей мере одним компонентом (1), содержащий этапы, на которых:
характеризуют компонент (1) с помощью способа по любому из предшествующих пунктов путем определения приложенных шаблонов uk напряжения и шаблона ik тока в указанных портах (р1, …, pn) для каждого шаблона uk напряжения, приложенного к указанным портам (р1, …, pn), и
моделируют систему с помощью шаблонов uk напряжения и шаблонов ik тока без вычисления матрицы полных проводимостей или импеданса для компонента (1).
20. Способ по п.20, в котором модель используют для анализа стабильности сети, частью которой является компонент (1).
21. Прибор (3, 2) для характеризации линейных свойств электрического компонента (1), имеющего n>1 портов, содержащий:
n генераторов (10) напряжения для генерирования напряжения для каждого порта
(р1, …, pn);
n датчиков (11) тока для восприятия тока в каждом порте (р1, …, pn)
и блок (3) управления,
причем блок (3) управления выполнен с возможностью осуществления процедуры оценки, включающей определение оцениваемой матрицы Y' полных проводимостей компонента (1) путем приложения напряжений к портам (р1, …, pn) и измерения отклика упомянутого компонента (1), а также выполнен с возможностью осуществления процедуры измерения, включающей приложение нескольких шаблонов uk напряжения к портам (р1, …, pn) компонента (1), причем каждый шаблон uk напряжения соответствует собственному вектору vk указанной оцениваемой матрицы Y' полных проводимостей, и определение отклика компонента (1) для каждого приложенного шаблона uk напряжения.
22. Прибор по п.21, имеющий n>2 портов (р1, …, pn),
в котором блок (3) управления автоматически генерирует несколько шаблонов uk напряжения на портах (р1, …, pn), измеряет соответствующие токи ik в портах (р1, …, pn) и получает из них линейный отклик компонента (1).
23. Прибор по п.21, в котором блок (3) управления выполнен с возможностью приложения по меньшей мере n различных шаблонов uk напряжения последовательно к указанным портам (р1, …, pn).
24. Прибор по п.22, в котором блок (3) управления выполнен с возможностью приложения по меньшей мере n различных шаблонов uk напряжения последовательно к указанным портам (р1, …, pn).
25. Прибор (3, 2) для характеризации линейных свойств электрического компонента (1), имеющего n>1 портов, содержащий:
единственный источник (4) напряжения и n преобразователей (5) напряжения для генерирования напряжения для каждого порта (р1, …, pn);
n датчиков (11) тока для восприятия тока в каждом порте (р1, …, pn)
и блок (3) управления,
причем блок (3) управления выполнен с возможностью осуществления процедуры оценки, включающей определение оцениваемой матрицы Y' полных проводимостей компонента (1) путем приложения напряжений к портам (р1, …, pn) и измерения отклика упомянутого компонента (1), а также выполнен с возможностью осуществления процедуры измерения, включающей приложение нескольких шаблонов uk напряжения к портам (р1, …, pn) компонента (1), причем каждый шаблон uk напряжения соответствует собственному вектору vk указанной оцениваемой матрицы Y' полных проводимостей, и определение отклика компонента (1) для каждого приложенного шаблона uk напряжения.
26. Прибор по п.25, имеющий n>2 портов (р1, …, pn),
в котором блок (3) управления автоматически генерирует несколько шаблонов uk напряжения на портах (р1, …, pn), измеряет соответствующие токи ik в портах (р1, …, pn) и получает из них линейный отклик компонента (1).
27. Прибор по п.25, в котором блок (3) управления выполнен с возможностью приложения по меньшей мере n различных шаблонов uk напряжения последовательно к указанным портам (р1, …, pn).
28. Прибор по п.26, в котором блок (3) управления выполнен с возможностью приложения по меньшей мере n различных шаблонов uk напряжения последовательно к указанным портам (р1, …, pn).
| US 4156842 А, 29.05.1979 | |||
| US 6054867 А, 25.04.2000 | |||
| Ручная рычажная лебедка | 1972 |
|
SU443835A1 |

