Изобретение относится к транспорту и может быть использовано в тяговых трансмиссиях гусеничных машин с бортовым принципом поворота.
Известны тяговые трансмиссии колесных и гусеничных машин, содержащие тепловой двигатель, генераторы, преобразователи, тяговые электродвигатели постоянного тока, обмотки возбуждения которых питаются от дополнительного источника.
Недостатками указанной трансмиссии являются перегрузка бортовых электродвигателей при повороте гусеничной машины, необходимость реверса электродвигателя отстающего борта при повороте и организации дополнительной ветви передачи мощности рекуперации с отстающего борта на забегающий.
Известна тяговая электротрансмиссия гусеничной машины, содержащая тепловой двигатель, генераторы, преобразователи, три электродвигателя, через механические редукторы связанные с движителями бортов.
Однако при использовании таких трансмиссий не обеспечивается оптимального распределения энергетических потоков между бортами при повороте, вследствие чего ухудшаются массогабаритные показатели трансмиссий, снижается надежность их в работе.
Цель изобретения - улучшение массогабаритных показателей электрической трансмиссии, повышение надежности ее в работе во всех режимах движения гусеничной машины.
Для этого в тяговой электротрансмиссии, содержащей два связанных с тепловым двигателем генератора тока, выходы которых соединены с входами соответствующих преобразователей напряжения, три электродвигателя, подключенных через коммутирующий блок к выходам преобразователей напряжения, первый редуктор, через который вал первого электродвигателя связан с валом первого бортового движителя, второй редуктор, через который вал второго электродвигателя связан с валом второго бортового движителя, третий редуктор, установленный между валами трех электродвигателей, третий редуктор выполнен в виде двух дифференциальных планетарных механизмов, причем водила первого и второго планетарных механизмов связаны с валами соответственно первого и второго электродвигателей, а солнечная шестерня второго планетарного механизма - с валом третьего электродвигателя, солнечная шестерня первого планетарного механизма застопорена, а эпициклы двух планетарных механизмов связаны друг с другом. Кроме того, коммутирующий блок выполнен из четырех ключевых элементов, при этом первый ключевой элемент включен между первым преобразователем напряжения и электродвигателем, второй ключевой элемент - между вторыми преобразователем напряжения и электродвигателем, третий ключевой элемент - между первым преобразователем напряжения и третьим электродвигателем, а четвертый ключевой элемент - между вторым преобразователем напряжения и третьим электродвигателем.
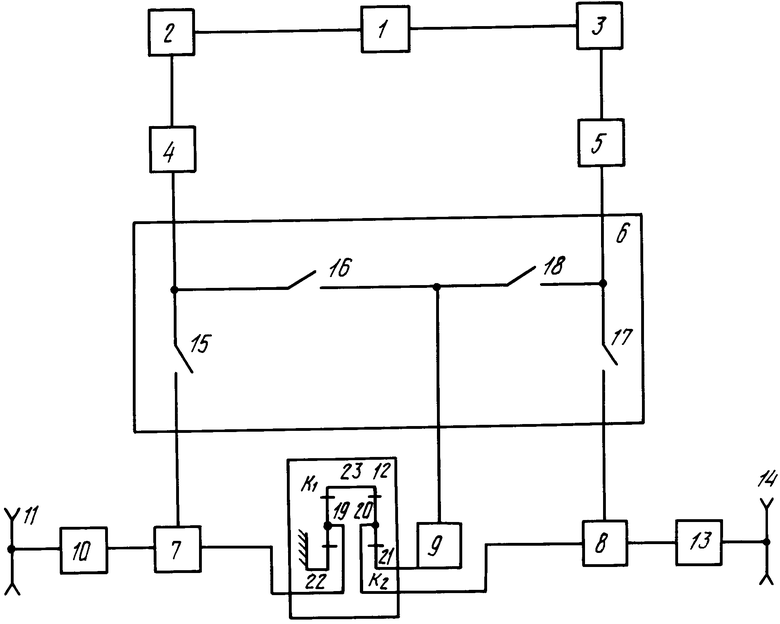
На чертеже приведена схема тяговой электротрансмиссии гусеничной машины.
Электротрансмиссия содержит тепловой двигатель 1, механически связанные с ним генераторы 2 и 3, преобразователи 4 и 5, входы которых подключены к статорным обмоткам генераторов 2 и 3, коммутирующий блок 6, подсоединенный первым и вторым входами к выходам преобразователей 4 и 5 соответственно, тяговые электродвигатели 7-9, подключенные к первому, второму и третьему выходам коммутирующего блока 6, первый редуктор 10 и первый движитель 11, механически связанные с валом электродвигателя 7, дополнительный редуктор 12, первый, второй и третий выходы которого механически связаны с валами электродвигателей 7-9 соответственно, второй редуктор 13 и второй движитель 14, механически связанные с валом электродвигателя 8.
Коммутирующий блок 6 содержит ключевые элементы 15-18, причем первые выводы ключевых элементов 15 и 16 объединены между собой и подсоединены к первому входу коммутирующего блока 6, первые выводы ключевых элементов 17 и 18 объединены между собой, подсоединены к второму входу коммутирующего блока 6, вторые выводы ключевых элементов 15 и 17 подключены к первому и второму выходам коммутирующего блока 6 соответственно, вторые выводы ключевых элементов 16 и 18 объединены и подключены к третьему выходу коммутирующего блока 6.
На чертеже также показаны водила 19 и 20, солнечная шестерня 21 дифференциальных планетарных механизмов, механически связанные с первым, вторым и третьим выходами дополнительного редуктора, солнечная шестерня 22, эпициклы 23 дифференциальных планетарных механизмов дополнительного редуктора 12.
Тяговая электротрансмиссия гусеничной машины работает следующим образом.
В режиме прямолинейного движения ключевые элементы 15 и 17 замкнуты, элементы 16 и 18 разомкнуты, мощность от теплового двигателя 1 через генераторы 2 и 3, преобразователи 4 и 5, коммутирующий блок 6 поступает на электродвигатели 7 и 8 и далее через редукторы 10 и 13 на движители 11 и 14 по двум параллельным ветвям. Электродвигатель 9 отключен и не создает момента опоры в дополнительном редукторе 12, размыкая механическую связь между валами электродвигателей 7 и 8.
Отметим, что при прямолинейном движении электродвигатель 9 может быть использован в качестве исполнительного звена при стабилизации траектории прямолинейного движения гусеничной машины, так как при одинаковых модулях дифференциальных планетарных механизмов дополнительного редуктора 12 частота вращения третьего электродвигателя 9 определяется как
ω3 = (K + 1) (ω2 - ω1), где ω1, ω2, ω3 - частоты вращения электродвигателей 7-9 соответственно;
К= К1= К2 - модуль дифференциального планетарного механизма (механизмов) дополнительного редуктора 12.
Режим поворота гусеничной машины имеет существенные особенности, заключающиеся прежде всего в создании грунтом большого момента сопротивления повороту. По этой причине при повороте гусеничной машины тяговое усилие на движителе забегающего борта необходимо значительно увеличивать (иногда до трехкратной величины), а движитель отстающего борта - затормаживать. Освобождающуюся при подтормаживании отстающего борта мощность желательно рекуперировать с движителя отстающего борта на движитель забегающего борта и использовать для реализации заданных характеристик движения.
В режиме поворота посредством размыкания ключевого элемента 15 (17) и замыкания ключевого элемента 16 (18) тяговый электродвигатель 7 (8) отстающего борта отключается от преобразователя 4 (5), а электродвигатель 9 подключается к соответствующему преобразователю 4 (5). При этом электродвигатель 9 выполняет одновременно две функции:
1. Вместе с электродвигателем 8 (7) забегающего борта передает часть мощности от теплового двигателя 1 к движителю 14 (11) забегающего борта;
2. Обеспечивает момент требуемого знака и величины на звеньях дифференциальных планетарных механизмов дополнительного редуктора 12, а следовательно, и движителей 11 и 14.
Работа трехдвигательной электротрансмиссии в этом режиме характеризуется следующими соотношениями
РД2= Р22+Р12+Р13= Р22+Р21= = ω2(М22+М21),
М21=  = -М12,
= -М12,
МД2= (М22+М21)IР2,
МД1= М12хIP1 ,
ω3 = (K + 1) (ω2 - ω1), где МД1, МД2 - моменты на движителях 11 и 14 бортов;
РД2 - суммарная мощность, поступающая на движитель забегающего борта;
Р22 - мощность, преобразуемая тяговыми электродвигателями 8 (7) забегающего борта;
Р12 - мощность, рекуперируемая по механическим валам и дифференциальным планетарным механизмам с движителя 11 (14) отстающего борта;
Р13 - мощность, преобразуемая электродвигателем 9;
М22 - момент, развиваемый электродвигателем 8 (7) забегающего борта;
М21, М12 - составляющие моментов на валах электродвигателей забегающего 8 (7) и отстающего 7 (8) бортов соответственно;
IP1, IP2 - передаточные числа редукторов 10 и 13 соответственно.
Таким образом, основной функцией электродвигателя 9 при повороте гусеничной машины является создание на движителях бортов пары моментов (М21, М12), обеспечивающих эффективный поворот гусеничной машины и циркуляцию мощности по замкнутому контуру: движитель забегающего борта - грунт - движитель отстающего борта - электротрансмиссия - движитель забегающего борта.
В начальный момент поворота поток мощности рекуперации Р12максимален, а мощность, преобразуемая электродвигателем 9, - минимальна. С ростом интенсивности поворота соотношение мощностей меняется в пользу последней.
Использование тяговой трехдвигательной электротрансмиссии позволяет снизить расчетную мощность бортовых электродвигателей с трехкратной номинальной до номинальной при номинальной мощности третьего электродвигателя 9, а следовательно, уменьшить суммарную расчетную мощность всех электродвигателей в 2 раза по сравнению с прототипом.
При использовании коммутирующего блока 6 снижается также и расчетная мощность преобразователей 4 и 5 (с трехкратной номинальной до номинальной), исключаются реверсивные режимы их работы.
Выход любого из трех электродвигателей из строя приводит не к потере управляемости гусеничной машины, а лишь к частичной коррекции алгоритма управления ею.
В качестве бортовых редукторов могут быть использованы обычные шестеренчатые редукторы, обеспечивающие постоянное передаточное число во всем диапазоне скоростей движения гусеничной машины.
В качестве ключевых элементов могут быть использованы контакторы, одно- и многофазные тиристорные ключи. В качестве генераторов, тяговых электродвигателей могут быть использованы электромашины как постоянного, так и переменного тока, преобразователи выполняются по традиционным схемам. (56) Патент ФРГ N 3728171, кл. В 60 К 1/02, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГОВАЯ ЭЛЕКТРОТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 1990 |
|
RU2006388C1 |
| ГИДРООБЪЕМНАЯ ТРАНСМИССИЯ ГУСЕНИЧНОГО ТРАКТОРА | 2003 |
|
RU2247037C1 |
| ТРАНСМИССИЯ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2006 |
|
RU2307758C1 |
| Гусеничная машина | 2019 |
|
RU2711105C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2006 |
|
RU2299146C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С БОРТОВЫМИ КОРОБКАМИ ПЕРЕДАЧ | 2009 |
|
RU2412847C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2006389C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С ЦЕНТРАЛЬНОЙ СОСТАВНОЙ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2438908C1 |
| Электромеханический двухпоточный привод транспортной машины с бортовым способом поворота | 2018 |
|
RU2726881C2 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2297926C1 |
Использование: гусеничные и колесные транспортные средства. Сущность изобретения: электротрансмиссия содержит тепловой двигатель, механически связанные с ним генераторы, подключенные к генераторам через преобразователи напряжения тяговые электродвигатели, выходные валы которых через первый и второй редукторы подсоединены к движителям. Трансмиссия отличается введением третьего электродвигателя, дополнительного редуктора, коммутирующего блока, механических связей между дополнительным редуктором и валами трех электродвигателей, выполнением коммутирующего блока в виде четырех ключевых элементов. Дополнительный редуктор состоит из двух дифференциальных планетарных механизмов, причем солнечная шестерня одного из них застопорена, эпициклы механически связаны, валы трех электродвигателей механически связаны с водилами и солнечной шестерней планетарных механизмов. Выход из строя любого из трех электродвигателей приводит не к потере управляемости гусеничной машины, а лишь к частичной коррекции алгоритма управления ею. 1 з. п. ф-лы, 1 ил.
