Изобретение относится к наземным транспортным средствам (машинам) с бортовым способом поворота (преимущественно гусеничным), конкретно − к силовым передачам (двухпоточным силовым установкам с трансмиссиями и механизмами поворота).
Известны двух- и многопоточные приводы наземных транспортных средств от силовой (энергетической) установки в составе, по меньшей мере, двух двигателей, в том числе обоих – электрического типа. При этом для соединения потоков мощности от двигателей используют суммирующие свойства дифференциальных (преимущественно планетарных) зубчатых механизмов, минимум однорядных [EP 1506905 A1, B62D 11/14, 16.02.2005, Fig. 1-3; Расчет и конструирование гусеничных машин / Носов Н.А. и др. Под ред. Н.А. Носова. – Л.: Машиностроение,1972. – 560 с. – С. 375, рис. IX.11; RU 64144U1, B60K 17/12, 26.07/2006].
Однако они не обеспечивают (при современных механизмах поворота) совмещения таких положительных качеств транспортного средства, как совместная работа двух тяговых двигателей и передача полного потока мощности от двух тяговых двигателей на забегающий борт при повороте.
Известны также конструктивно различные механизмы поворота транспортной машины бортовым способом (за счет разности скоростей вращения ведущих колес движителей левого и правого бортов), в том числе функционально входящие в состав механизма передач и поворота (МПП) трансмиссий. В них широко применяют упомянутые дифференциальные механизмы и принцип двух- и многопоточности, предусматривая при этом дополнительные гидро- или электромоторы, что улучшает поворотливость транспортной машины [Расчет и конструирование гусеничных машин / Носов Н.А. и др. Под ред. Н.А. Носова. – Л.: Машиностроение,1972. – 560 с. – С. 374-398].
Однако и им свойственен тот же недостаток.
Наиболее близким аналогом (прототипом) заявляемого изобретения, то есть совпадающим с ним по назначению и по общим существенным конструктивным признакам, является электромеханический двухпоточный привод транспортной машины с бортовым способом поворота, содержащий две электромашины, по крайней мере, с режимом тяговых электродвигателей, и механическую трансмиссию со сложным суммирующим планетарным механизмом с двумя центральными оппозитными валами [Расчет и конструирование гусеничных машин / Носов Н.А. и др. Под ред. Н.А. Носова. – Л.: Машиностроение,1972. – 560 с. – С. 333, рис. VIII.7].
В нем планетарный механизм выполнен в виде центрального однорядного четырехзвенного (с двухвенцовыми сателлитами) планетарного редуктора, водило которого соединено одним из упомянутых центральных валов с выходным валом через зубчатую коробку передач с управляемыми фрикционными муфтами, одна солнечная шестерня – с другим из упомянутых центральных валов, являющимся входным, а другая солнечная шестерня и эпицикл соединены, посредством цилиндрических зубчатых пар, с валами одной и другой электромашины соответственно.
Такой привод, разработанный для гусеничного трактора ЧТЗ, обладает традиционными для параллельно-последовательного и параллельного гибридов преимуществами: достаточно широкий, ступенчато-бесступенчатый диапазон изменения передаточных чисел; возможность двигаться как за счет мощности обоих электромашин в режиме тяговых двигателей. При этом зубчатый планетарный (суть дифференциальный) механизм обеспечивает суммирование мощностей электромашин, а также двукратное обращение режимов работы электромашин (при использовании только одного обращения в диапазоне регулирования). Понижающая коробка передач обеспечивает включение двух передач на переднем ходу (за счет фрикционов) и одну передачу заднего хода.
К недостаткам прототипа следует отнести невозможность:
- во-первых, использования описанного устройства в качестве механизма поворота;
- во-вторых, передавать мощность обеих электромашин при повороте на один борт, без применения соответствующих и достаточно сложных механизмов поворота (не считая простейшей схемы с бортовыми фрикционами).
Техническая проблема заключается в устранении указанных недостатков прототипа и, соответственно, в улучшении технико-эксплуатационных (в приложении к транспортным машинам гражданских) или тактико-технических (в приложении к транспортным машинам военным и специальным) характеристик за счет расширения функционального назначения привода приданием функций механизма поворота транспортной машины, с возможностью, при повороте бортовым способом, передачи мощности обеих электромашин на один борт – левый или правый.
Решение поставленной проблемы достигается тем, что в электромеханическом двухпоточном приводе транспортной машины с бортовым способом поворота, содержащем две электромашины, по крайней мере, с режимом тяговых электродвигателей, и механическую трансмиссию со сложным суммирующим планетарным (дифференциальным) механизмом с двумя центральными оппозитными валами, согласно заявляемому изобретению, планетарный механизм выполнен в виде разнесенных по бортам транспортной машины двухрядных планетарных редукторов, соответственно, левого и правого, с общими для пары рядов водилами, соединенными посредством упомянутых центральных валов, соответственно, с левым и правым бортовыми редукторами или коробками передач, солнечные шестерни левого и правого рядов попарно объединены в два солнечных звена, одно из которых соединено с валом одной электромашины, а другое – с валом другой электромашины, при этом эпициклы всех планетарных рядов снабжены управляемыми индивидуальными фрикционными тормозами.
Решение поставленной проблемы достигается также за счёт дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков):
- вал одной электромашины может быть соединен с соответствующим солнечным звеном посредством зубчатой пары, а вал другой электромашины соединен с соответствующим солнечным звеном посредством зубчатой пары с паразитной шестерней (это обеспечивает, как дополнительное преимущество, различное направление вращения солнечных звеньев, согласно конкретному синтезу планетарных передач, при одинаковом направлении вращения выходных валов обеих электромашин, что особенно ценно при использовании идентичных электромашин);
- может быть предусмотрена блокирующая муфта, с возможностью временного взаимодействия упомянутых солнечных звеньев и, соответственно, блокировки валов электромашин (это, как уже очевидно из формулировки заключительной части этого конструктивного признака, позволяет блокировать электромашины со свойственной этому режиму внешне-принудительной синхронизации вращения валов обеих электромашин, что всегда желательно иметь в арсенале технико-эксплуатационных возможностей привода, особенно с обратимыми электромашинами в интересах, в частности, рекуперации электроэнергии – см. следующую дополнительную совокупность конструктивных признаков);
- при любой совокупности признаков из указанных основной и двух дополнительных, электромашины могут быть выполнены обратимыми, с возможностью рекуперации электроэнергии при пассивном движении транспортной машины (это позволяет реализовать потенциально возможные в эксплуатационной «жизни» транспортной машины режимы пассивного движения с извлечением энергетической выгоды в виде рекуперации энергии внешних сил – гравитации, инерции, тяговой при транспортировке тягачом);
- при любой совокупности признаков из указанных основной и двух дополнительных, электромашины могут быть дополнены индивидуальными редукторами, например встроенными в их корпуса (это позволяет дополнительно адаптировать электромашины как к их присоединению к тому или иному звену планетарного суммирующего механизма, так и к условиям работы тяжелых гусеничных и многоколесных транспортных машин как тяговых электродвигателей, когда требуются большие крутящие моменты на движителе).
Среди известных устройств такого же назначения (приводов) как в Российской Федерации / бывшем СССР и за рубежом при предварительном поиске не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной, что свидетельствует о мировом уровне новизны.
В то же время, именно за счёт последней достигается новый технический результат в соответствии с поставленной проблемой. Таким образом, прослеживается причинно-следственная связь между конструктивными признаками заявляемого устройства и техническим результатом от его использования.
Наличие критерия патентоспособности «промышленная применимость» очевидна: в конструкции все обязательные элементы и их связи основаны на применении промышленно освоенных материалах и технологиях машиностроения.
Поскольку заявляемое техническое решение явным образом не следует для специалиста в области транспортного машиностроения из современного уровня техники, то налицо и третий критерий изобретения – наличие изобретательского уровня.
Заявляемый электромеханический двухпоточный привод пояснен (на относительно общем и частных примерах) на чертежах:
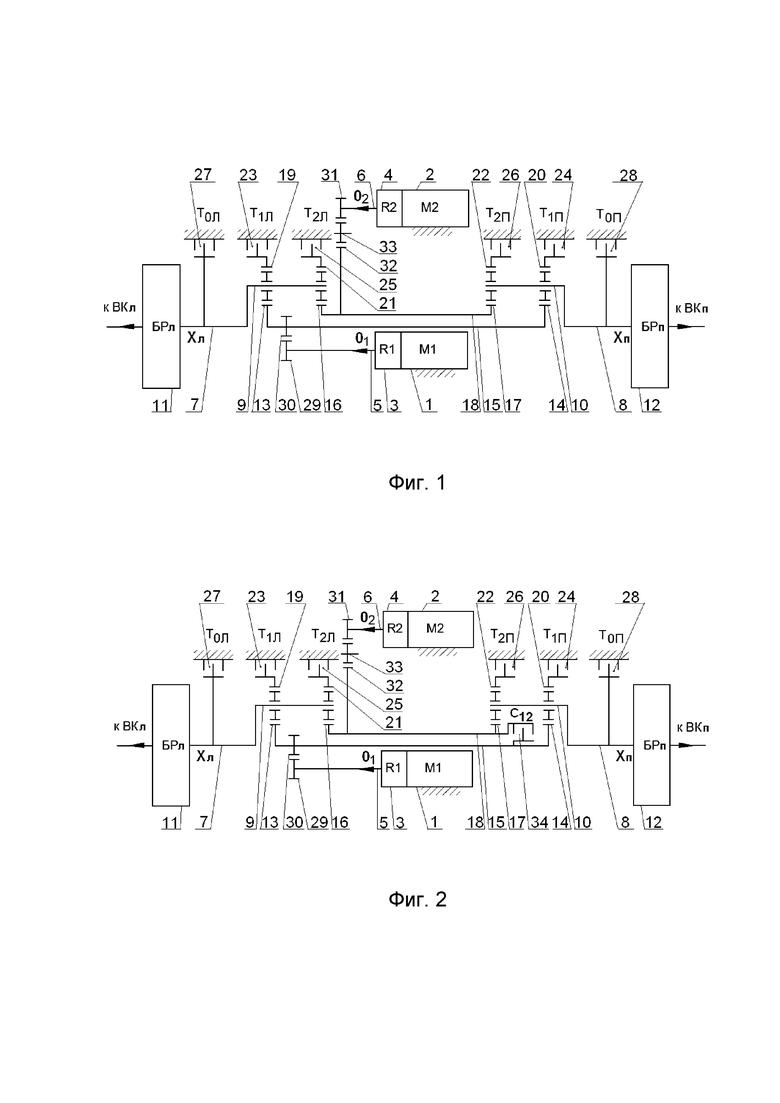
на фиг.1 показана упрощенная кинематическая схема заявляемого привода, относительно общий случай (пример), где 01, 02 – выходные валы электромашин М1, М2 соответственно индексам 1 и 2, с учетом наличия их индивидуальных редукторов R1, R2; они же – входные валы трансмиссии в составе привода; Xп, Xл – выходные валы трансмиссии в составе привода (индексы п – на правом, л – на левом бортах транспортной машины); T1л, T2л, T1п, T2п – индивидуальные тормоза водил планетарных рядов в составе трансмиссии; T0л, T0л – остановочные тормоза трансмиссии; БРл, БРп – бортовые редуктора; ВКл, ВКп – ведущие колеса; стрелками обозначены направления потоков мощности; оси валов условно не показаны;
на фиг. 2 – то же, с дополнительным элементом – управляемой блокирующей муфтой С12 (двойной индекс, соответствующий индексам в обозначениях электромашин) взаимосвязи солнечных звеньев трансмиссии.
Заявляемый электромеханический двухпоточный привод транспортной машины с бортовым способом поворота (как пример реализации с указанной выше совокупностью существенных признаков) содержит (см. фиг. 1): электромашины 1 (М1) и 2 (М2), по крайней мере, с режимом тяговых электродвигателей (а предпочтительно – идентичные, обратимые, с индивидуальными, встроенными в их корпуса редукторами 3 (R1) и 4 (R2), и выходными валами 5 и 6; а также механическую трансмиссию со сложным суммирующим планетарным (дифференциальным) механизмом с двумя центральными оппозитными валами – 7 и 8 соответственно. Планетарный механизм выполнен в виде разнесенных по бортам транспортной машины двухрядных планетарных редукторов, соответственно, левого и правого, с общими для пары рядов водилами 9 и 10 соответственно. Водила 9 и 10 соединены посредством валов 7 и 8, соответственно, с левым 11 и правым 12 бортовыми редукторами (БРл и БРп соответственно) или коробками передач (как альтернативный частный пример) и далее – к ведущим колесам (левому ВКл и правому ВКп) транспортной машины. Солнечные шестерни левого и правого рядов попарно объединены в два солнечных звена: шестерни 13 и 14 – в звено 15, а шестерни 16 и 17 – в звено 18. Звено 15 соединено с валом 5 электромашины 1 (редуктора 3), а звено 18 – с валом 6 электромашины 2 (редуктора 4). Эпициклы 19, 20, 21 и 22 планетарных рядов снабжены управляемыми индивидуальными фрикционными тормозами (преимущественно дискового типа) 23, 24, 25 и 26 (T1л, T1п,, T2л и T2п) соответственно.
Рекомендуется установка на валах 7 и 8 остановочных тормозов 27 (T0л,) и 28 (T0л), также преимущественно дискового типа.
При выборе электромашин 1 и 2 с одинаковым направлением вращения валов 5 и 6, как правило, вал 5 должен быть соединен с солнечным звеном 15 посредством зубчатой пары 29, 30, а вал 6 – с солнечным звеном 18 посредством зубчатой пары 31, 32 с паразитной шестерней 33, что соответствует известным из теории планетарных передач особенностям кинематики звеньев таких передач (см. также ниже по тексту о работе устройства).
В приводе может быть (как еще один целесообразный частный случай устройства) предусмотрена блокирующая муфта 34 (С12) взаимосвязи солнечных звеньев 15 и 18, с возможностью временной блокировки упомянутых солнечных звеньев и, соответственно, блокировки валов 5 и 6 электромашин 1 и 2 (см. фиг. 2), что поясняется ниже по тексту в описании работы устройства.
Электромашины 1 и 2 могут быть выполнены обратимыми (двигатель/генератор), с возможностью рекуперации («возврата», «получения») электроэнергии при пассивном движении транспортной машины.
Электромашины 1 и 2 могут быть дополнены индивидуальными редукторами – как согласующими, так и просто увеличивающими (для обеих электромашин одинаково), например встроенными в их корпуса.
Заявляемое устройство работает следующим образом.
Прямолинейное движение транспортной машины (теоретически в одинаковых дорожных условиях по левому и правому бортам), осуществляют за счет мощности любой одной или обеих электромашин 1 (М1), 2 (М2) в режиме электродвигателя. В последнем случае мощности тяговых электромашин (как двигателей) 1 (М1) и 2 (М2) суммируются на планетарных редукторах.
С позиций заявляемого изобретения, получения основного (из числа указанных выше по тексту) технического результата, особенно важно то, что при поворотах транспортной машины с радиусом B/2, где В – колея транспортной машины), то есть вокруг гусеницы, в тяжелых дорожных условиях можно направить весь суммарный поток мощности от электромоторов 1 (М1), 2 (М2) на забегающий борт (левый или правый в зависимости от направления поворота транспортной машины). Для этого при обеих включенных электромашинах 1 (М1), 2 (М2) (в режиме тяговых двигателей), для поворота:
а) направо (см. выделенный заливкой режим № 6 в таблице) – включают тормоза 23 (Т1л), 25 (Т2л), и 28 (T0п) при выключенных остальных элементах управления;
б) налево (см. выделенный заливкой режим № 9 в таблице) – включают тормоза 24 (Т1п), 26 (Т2п), и 27 (T0л) при выключенных остальных элементах управления.
Поэтому режимы поворота №№ 6 и 9, как и прямолинейного движения с использованием суммарной мощности обеих электромашин 1 (М1) и 2 (М2), отнесены к «форсированным» режимам.
Для включения того или иного режима движения транспортного средства (включая прямолинейное движение или поворот) используют элементы управления режимами привода: тормоза T1л, T1п, T2л, T2п (позиции 23, 24, 25, 26 соответственно), в соответствии с таблицей режимов.
Таблица
Режимы работы привода (к фигурам 1 и 2)
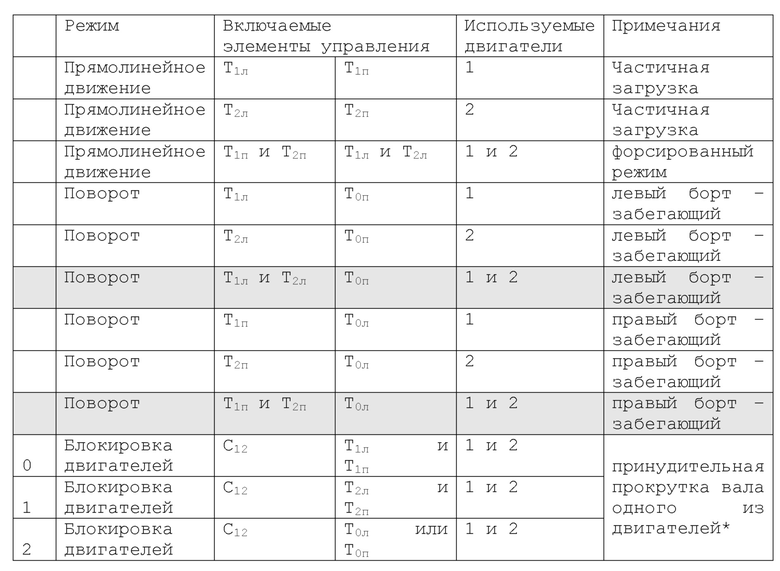
При одном выключенном остановочном тормозе 27 (T0л) или 28 (T0п) имеют место свободные радиусы поворота транспортной машины.
Для остановки транспортной машины (в таблице режим не указан) включают одновременно оба остановочных тормоза 27 (T0л), и 28 (T0п) при выключенных тормозах T1л, T1п, T2л, T2п (позиции 23, 24, 25, 26 соответственно).
При соединении вала 5 электромашины 1 с солнечным звеном посредством зубчатой пары 29, 30, а вала 6 электромашины 2 с солнечным звеном посредством зубчатой пары 31, 32 с паразитной шестерней 33, солнечные звенья вращаются разнонаправленно при одинаковом направлении вращения выходных валов 5 и 6.
При наличии блокирующей муфты 34 (C12), ее включение обусловливает временное взаимодействие (точнее – сцепление) солнечных звеньев 15 и 18 друг с другом и, соответственно, блокировку валов 5, 6 электромашин 1 и 2. Соответственно, расширяются возможности рекуперации энергии (см. режимы 10, 11, 12 в таблице «Режимы работы привода»).
Режим рекуперации энергии с пассивного движения транспортной машины (за счет сил тяжести на спуске, инерции или транспортировки тягачом) обеспечивается использованием электромашин в режиме электрогенераторов при включенных соответствующих элементах управления из ряда T1л, T1п, T2л, T2п (позиции 23, 24, 25, 26 соответственно).
При использовании с бортовыми коробками передач (БКП), разумеется до бортредукторов, или с центральной коробкой передач (ЦКП) любого типа такой привод сохраняет свою работоспособность и положительный технический результат при использовании.
При наличии индивидуальных редукторов 3 и 4 непосредственно за валами электромашин 1 и 2 соответственно, конкретным в каждом случае подбором их передаточных чисел, будет иметь место согласованная (между собой и суммирующим рядом), увеличенная в соответствии с потребной расчетной (по известным расчетным методикам) величиной крутящего момента для «более мощного», тяжелого транспортного средства, работа.
Таким образом, заявляемое устройство, независимо от выбора того или иного частного случая схемы и конструкции, позволяет устранить отмеченные выше недостатки прототипа и улучшить технико-эксплуатационные (в приложении к транспортным машинам гражданским) или тактико-технические (в приложении к транспортным машинам военным и специальным) характеристики, за счет расширения функционального назначения привода приданием функций механизма поворота транспортной машины, с возможностью, при повороте бортовым способом, передачи мощности обеих электромашин на один борт – левый или правый.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трансмиссия машины с бортовым способом поворота | 2024 |
|
RU2824226C1 |
| ДВУХПОТОЧНАЯ ТРАНСМИССИЯ ТРАНСПОРТНОЙ МАШИНЫ С БОРТОВЫМ СПОСОБОМ ПОВОРОТА | 2015 |
|
RU2599855C1 |
| Трансмиссия наземного транспортного средства на базе вальной коробки перемены передач | 2022 |
|
RU2794081C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| Трансмиссия секционной колесной машины, преимущественно трактора с шарнирно-сочлененной рамой | 2022 |
|
RU2796857C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С ЦЕНТРАЛЬНОЙ СОСТАВНОЙ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2438908C1 |
| Четырехгусеничное шасси | 2022 |
|
RU2798151C1 |
| Механизм распределения мощности в трансмиссии транспортного средства | 2022 |
|
RU2789152C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2003 |
|
RU2258623C1 |
| ГИБРИДНЫЙ МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОЙ МАШИНЫ | 2017 |
|
RU2658486C1 |
Изобретение относится к области транспортного машиностроения. Электромеханический двухпоточный привод транспортной машины с бортовым способом поворота содержит две электромашины с режимом тяговых электродвигателей и механическую трансмиссию со сложным суммирующим планетарным механизмом с двумя центральными оппозитными валами. Планетарный механизм выполнен в виде разнесенных по бортам транспортной машины двухрядных планетарных редукторов с общими для пары рядов водилами, соединенными посредством центральных валов с бортовыми редукторами или коробками передач. Солнечные шестерни левого и правого рядов попарно объединены в два солнечных звена, соединенных с валами электромашин. Эпициклы всех планетарных рядов снабжены управляемыми индивидуальными фрикционными тормозами. Достигается улучшение технико-эксплуатационных характеристик. 4 з.п. ф-лы, 1 табл., 2 ил. 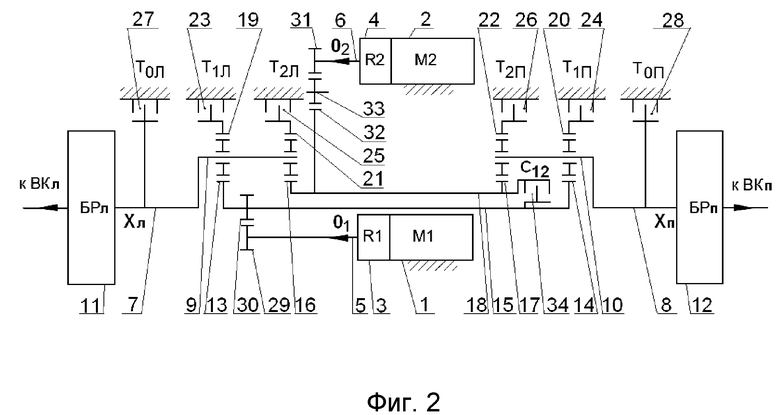
1. Электромеханический двухпоточный привод транспортной машины с бортовым способом поворота, содержащий две электромашины, по крайней мере, с режимом тяговых электродвигателей, и механическую трансмиссию со сложным суммирующим планетарным механизмом с двумя центральными оппозитными валами, отличающийся тем, что планетарный механизм выполнен в виде разнесенных по бортам транспортной машины двухрядных планетарных редукторов, соответственно, левого и правого, с общими для пары рядов водилами, соединенными посредством упомянутых центральных валов, соответственно, с левым и правым бортовыми редукторами или коробками передач, солнечные шестерни левого и правого рядов попарно объединены в два солнечных звена, одно из которых соединено с валом одной электромашины, а другое – с валом другой электромашины, при этом эпициклы всех планетарных рядов снабжены управляемыми индивидуальными фрикционными тормозами.
2. Привод по п.1, отличающийся тем, что вал одной электромашины соединен с соответствующим солнечным звеном посредством зубчатой пары, а вал другой электромашины соединен с соответствующим солнечным звеном посредством зубчатой пары с паразитной шестерней.
3. Привод по п.1, отличающийся тем, что в нем предусмотрена блокирующая муфта с возможностью временного взаимодействия упомянутых солнечных звеньев и, соответственно, блокировки валов электромашин.
4. Привод по любому из пп.1-3, отличающийся тем, что электромашины выполнены обратимыми с возможностью рекуперации электроэнергии при пассивном движении транспортной машины.
5. Привод по любому из пп.1-3, отличающийся тем, что электромашины дополнены индивидуальными редукторами, например, встроенными в их корпуса.
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| Автомат для контроля и сортировки деталей | 1950 |
|
SU93063A1 |
| 0 |
|
SU156493A1 | |
| DE 4314206 A1, 03.11.1994 | |||
| US 20100224426 A1, 09.09.2010. | |||

