Изобретение относится к электроэнергетике и может быть использовано для промышленного производства электрической энергии.
Аналогом предлагаемого способа и устройства является гидроэлектростанция, преобразующая потенциальную энергию жидкого рабочего тела в электрическую энергию.
К числу основных достоинств аналога относятся возобновляемость гидроэнергии, низкая стоимость вырабатываемой энергии и высокая маневренность.
Недостатками аналога являются затопление больших территорий, ухудшение экологической обстановки в бассейнах рек, ущерб рыбному хозяйству и высокая стоимость строительства.
Прототипом предлагаемого способа и устройства является безтопливная машина водного давления, в которой используется свойство окружающей воды развивать добавочную силу к силе тяжести твердого рабочего тела (отбросов), погружаемого в море, приводящей в движение генератор электрического тока.
Анализ описания патента позволяет убедиться в отсутствии гипотетических свойств окружающей воды, порождающих дополнительные силы к силе тяжести рабочего тела, погруженного в воду, которая является единственной реальной причиной движения генератора электрического тока машины прототипа.
Способ получения электрической энергии имеет принципиальные недостатки, так как в нем не учитываются специфические свойства твердого рабочего тела, поскольку в последовательность действий над рабочим телом как материальным объектом не включены обязательные энергоемкие операции подготовки рабочего тела (выемка из карьеров, концентрация и прессование отходов и т. п. ) и перевозка рабочего тела к месту погружения в воду. Если допустить, что для осуществления указанных операций используются традиционные устройства (землеройные машины, прессы, морские суда и др. ), потребляющие энергетическое топливо, то экологическая чистота производства электрической энергии не может быть достигнута.
К числу недостатков устройства-прототипа относится то, что в его состав не входят блоки и системы, необходимые для осуществления технологического процесса производства электроэнергии при использовании твердого рабочего тела, а именно: агрегаты выемки и/или подготовки рабочего тела, транспортная система для перевозки рабочего тела к месту погружения в море и др. Одним из принципиально важных недостатков устройства является то, что конструкция рабочего органа, представляющего собой жесткую раму с зубчатыми колесами, укрепленными на ее концах и охваченными бесконечной цепью с ковшами, не может обеспечить погружение твердого рабочего тела на такую глубину, при которой становится возможным производство электрической энергии в количестве, превышающим реальные затраты на концентрацию, прессование (или выемку из карьеров) рабочего тела и на его перевозку к месту погружения.
Целью изобретения является создание морской электрической станции, обладающей техническими и экономическими показателями, близкими к показателям ТЭС, ГЭС и АЭС, обеспечивающей экологическую чистоту производства электрической энергии и реализацию неисчерпаемых запасов потенциальной энергии, заключенной в твердом материале (гравий, песок, глина и т. п. ), залегающем у береговой линии и на дне Мирового океана, имеющего значительные перепады глубины.
Сущность предлагаемого способа состоит в том, что предусматривается преобразование потенциальной энергии твердого рабочего тела в электрическую энергию путем проведения с рабочим телом замкнутого цикла операций, включающего выемку рабочего тела из подводного или надводного карьера, транспортировку рабочего тела к месту погружения в море, равномерное перемещение по активному пути и сброс на дно моря в конце активного пути, причем выемка и транспортировка рабочего тела осуществляются при использовании части потенциальной энергии рабочего тела, преобразованной в электрическую энергию.
Сущность предлагаемого устройства состоит в том, что морская электрическая станция содержит агрегаты, системы и блоки, необходимые для осуществления замкнутого цикла операций с твердым рабочим телом с учетом его физических свойств. В число таких агрегатов и систем входят
агрегаты выемки рабочего тела из карьеров близ поверхности моря;
транспортная система, содержащая составные суда, состоящие из грузовых секций для перевозки рабочего тела к месту погружения в воду и энергетических секций для буксировки грузовых секций, а также плавающие платформы, соединенные гибкими кабелями с электродвигателями энергетических секций;
подводные линии электропередачи, соединяющие энергетические агрегаты с плавающими платформами транспортной системы и распределительной сетью;
энергетические агрегаты двух видов, отличающиеся конструктивным выполнением рабочих органов;
гравитационный накопитель энергии для рекуперации энергии, затрачиваемой в технологическом цикле ее производства;
плавающие платформы для установки энергетических агрегатов и гравитационного накопителя энергии, выполненные в виде бездонных катамаранов с регулируемыми глубиной и равномерностью осадки;
устройства регулирования глубины осадки энергетических секций составных судов и транспортной системы;
устройство автоматического наматывания и сматывания гибкого кабеля на плавающий барабан, размещенный в отсеке энергетической секции составного судна;
автоматические плавсредства для поддержания и регулирования глубины погружения в воду кабелей линий электропередачи;
устройства синхронизации и синфазирования рабочих генераторов электрического тока;
блок защиты генераторов электрического тока от сброса нагрузки.
Указанные операции, назначение, состав и взаимосвязи агрегатов, систем и блоков составляют сущность отличительных признаков морской электрической станции.
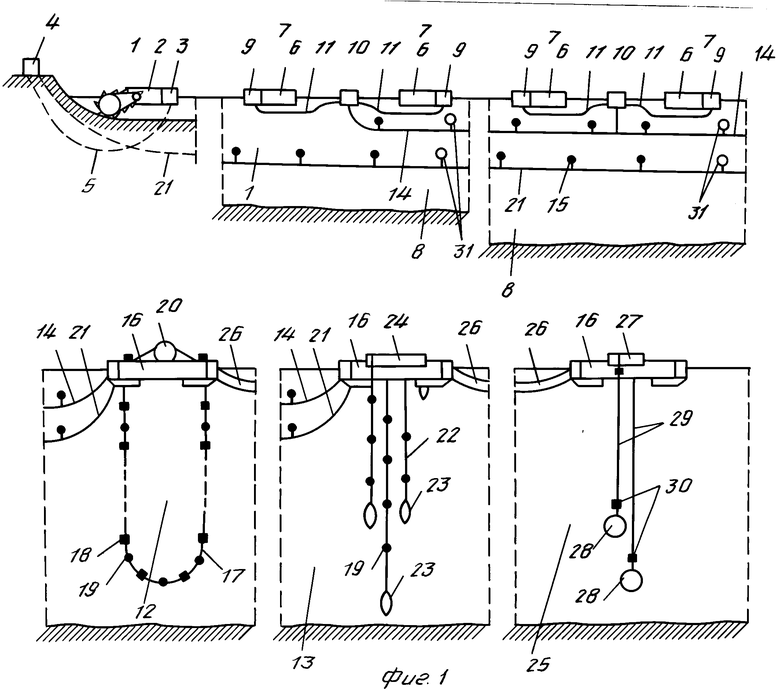
На фиг. 1 изображены агрегаты и системы морской электрической станции; на фиг. 2 - график зависимости θ (h) и β (h); на фиг. 3 - график ρгэт (t); на фиг. 4 - график движения секций транспортной системы.
В подводном карьере работает агрегат 1 выемки грунта , который состоит из многорядной роторно-цепной землеройной машины 2 непрерывного действия и энергетического блока 3, обеспечивающего рабочее перемещение машины 2. Машина 2 и энергетический блок 3 снабжаются электроэнергией посредством силового кабеля 5 от береговой трансформаторной подстанции 4.
Агрегат 1 выемки грунта снабжен устройствами погрузки грунта в грузовые секции 6 составных судов 7 транспортной системы 8.
Энергетический коэффициент агрегата 1, определяемый как отношение мощности, расходуемой агрегатом (ρв), к весу рабочего тела, изымаемого в 1 с (ν), для высокопроизводительных роторных и роторно-цепных экскаваторов равен
ΚВ= ρВ/ν = 0,55[MВт/(т/c)] .
Энергетическая секция 9, обеспечивающая передвижение грузовой секции 6 составного судна 7, снабжена средствами для автоматического наматывания и сматывания на барабан гибкого кабеля 11, посредством которого на ходовые электродвигатели секции 9 подается электроэнергия, поступающая с платформы 10.
Плавающие платформы 10 укреплены на якорях и снабжаются электроэнергией, поступающей от энергетических агрегатов 12 или 13 по линии 14 электропередачи, обслуживающей транспортную систему 8. На стыках участков последней энергетические секции 9, двигающиеся навстречу друг другу, производят обмен нагруженных грузовых секций 6 на разгруженные и наоборот.
Энергетический коэффициент транспортной системы 8 определяется как отношение суммарной мощности (ρт), потребляемой двигателями всех нагруженных и порожних составных судов 7 при расстоянии между агрегатами выемки грунта и энергетическим агрегатом 12 или 13, равном L (км), к полезному весу рабочего тела, доставляемого к месту погружения в воду за одну секунду ν (т/с).
В транспортной системе 8 используются наиболее совершенные грузовые корабли, такого типа как супертанкер "Глобатик-Токио", для которого характерны следующие данные: дедвейт Λ= 495˙ 103 т, скорость v = 25 км/ч (6,94 ˙ 10-3 км/с) и мощность двигателей ρд = 38 МВт.
Энергетический коэффициент супертанкера, везущего только полезный груз, равен
Kст= [ρд/(Λ/t)] = [(ρд/ΛV)L] = 1,1·10-2L [МВт/(т/с)] .
Энергетический коэффициент транспортной системы 8 формируется с учетом особенностей этой системы, а именно: во-первых, кроме нагруженных кабелей, имеется равное число порожних, двигатели которых расходуют согласно нормам одну треть мощности нагруженных кораблей при равной скорости хода и, следовательно, величина мощности двигателей возрастает на 1/3, что учитывается коэффициентом θ = 1,33;
во-вторых, полезная нагрузка корабля уменьшается и составляет Λп= Λ/κζ , где κ - коэффициент потерь веса перевозимого сырого грунта при погружении его в воду как рабочего тела (для гравия, щебенки, крупного песка и др. κ = 1,6), а коэффициентом ζ = = 1,1 учитывается вес контейнеров погрузочно-разгрузочных механизмов.
Следовательно
Kт= (ρдθ/ΛV)κζL ≃ 2,6·10-2[МВт/(т/с)] .
Энергетические агрегаты 12 и 13 конвейерного типа и гиревого типа соответственно расположены на плавающих платформах-катамаранах 16, между корпусами каждого из которых имеется порт для приема грузовых секций 6. Рабочим органом агрегата 12 является замкнутый многорядный, сплетенный из канатов или составленный из цепей гибкий элемент 17, к которому крепятся ковши 18 для рабочего тела и глубоководные поплавки 19. Гибкий элемент 17, нагруженный с одной cтороны рабочим телом, приводит в движение рабочее колесо 20, связанное через систему передач с низкооборотными генераторами электрического тока, которые выдают энергию в линию 14 электропередачи и в основную линию 21 электропередачи, соединяющую через трансформаторную подстанцию 4 энергетические агрегаты 12 и 13 с распределительной энергетической сетью.
Ковши 18 для рабочего тела загружаются на борту платформы 16 и автоматически разгружаются в конце активного пути.
Рабочим органом энергетического агрегата 13 гиревого типа является канат (или цепь) 22 с поплавками 19, к концу которого прикреплен контейнер 23 с рабочим телом. При погружении нагруженного контейнера 23 канат вращает рабочий барабан 24, ось которого расположена вдоль корпуса катамарана 16 и который связан системой передач с низкооборотным генератором электрического тока. При погружении контейнера 23 порожний контейнер, канат которого намотан на тот же барабан, движется вверх и при выходе на поверхность моря становится под погрузку. Время, необходимое для нагрузки контейнера рабочим телом, когда оба контейнера данного барабана неподвижны, равно полному времени погружения. В течение этого времени генератор электрического тока, связанный с барабаном, переходит в ждущий режим, т. е. вращается с номинальной скоростью и фазой на холостом ходу, при помощи вспомогательного мотора, синхронизируется и синфазируется синхронной машиной, питаемой от общестанционного источника эталонного напряжения. Нагрузку принимает генератор электрического тока, связанный с вторым рабочим барабаном, установленным на втором корпусе катамарана и движущимся в противофазе по отношению к первому, чем и обеспечивается непрерывность производства энергии.
Контейнеры загружаются рабочим телом с борта платформы 16 и автоматически разгружаются в конце активного пути.
Энергия, производимая энергетическим агрегатом 13 поступает в линии 14 и 21 электропередачи.
Энергетический коэффициент агрегатов 12 и 13, определяемый как отношение мощности, развиваемой агрегатом (ρa), к весу рабочего тела, расходуемого в одну секунду (ν), равен
KA= ρA/ν = 9ηh ≃ 9h [МВт/(т/c)] , где 9η = 9M/c2 - произведение ускорения силы тяжести на КПД энергетического агрегата;
h - глубина погружения рабочего тела, км.
Мощность, отдаваемая морской электрической станцией в распределительную сеть, равна
ρo= ρa-ρв-ρт= ν (9h - Kв - Kт) МВт, а КПД станции и относительная скорость расходования рабочего тела определяется как
θ = ρo/ρA = 1-(iкo/9h) и
β = ν/ρo = (9h-iкo)-1 , причем Kо = Kв + Kт.
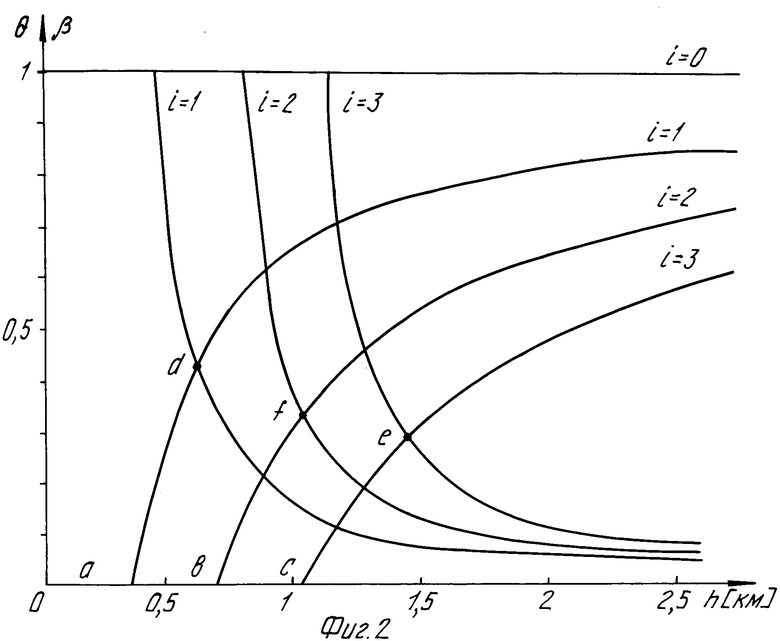
Графики θ (h) и β (h), построенные для L = 100 км, представлены на фиг. 2. Параметром является i = K/Ko , (i = 0, 1, 2 и 3).
Для каждой величины i существуют области полной нереализуемости энергетического агрегата
O < h < iкo/9 , верхние границы которых обозначены буквами a, b и c.
Области реализуемости энергетических агрегатов лежат правее точек пересечения кривых θ (h) и β (h), обозначенных d, f и e, после которых имеет место увеличение КПД станции θ (h) и быстрое уменьшение расхода рабочего тела в секунду на один мегаватт мощности агрегата β (h).
Данные, приведенные на фиг. 2, необходимы для качественных и количественных оценок морских электрических станций любой мощности, а также позволяет оценить реализуемость прототипа.
В прототипе высота рабочего органа, представляющего собой раму, охваченную цепью с ковшами для рабочего тела, определяется как несколько сот футов. Из графика θ (h) следует, что даже при практически нереализуемой высоте рамы h1 = 350 м (1160 футов) энергетический агрегат прототипа находится в области полной нереализуемости.
Принципиально важная особенность твердого (сыпучего) рабочего тела состоит в том, что при его использовании имеет место изменение во времени силы тяжести рабочего тела, находящегося на активном пути. Это связано с неточностью срабатывания механизмов выемки и доставки рабочего тела, а также с изменением во времени его плотности. Следовательно, момент сил, приложенных к генератору электрического тока, также изменяется во времени, что сопряжено с нестабильностью частоты, фазы и напряжения указанного генератора. Для устранения этого эффекта необходимо автоматически изменять мощность, отбираемую от генератора, чтобы соблюдать условие
ρгэт(t)/Mгэт(t) = ω = Const ,
ω - угловая скорость;
ρгэт (t) - изменяющаяся мощность, отдаваемая генератором;
Мгэт (t) - изменяющийся момент сил, приложенных к генератору.
Постоянcтво величины ω достигается путем дополнительного расхода рабочего тела в секунду на величину νдп= νпс+ν (t) и соответствующим увеличением мощности, отбираемой от генератора, которая становится равной
ρгэт(t)= ρa+ρпс+ρ (t), где ρпс= 9hνпс - постоянная составляющая дополнительной мощности;
ρ(t)= 9hν (t) - переменная составляющая дополнительной мощности.
Примерный график ρгет (t) представлен на фиг. 3. Избыточная энергия (заштрихованная область) отбирается и накапливается гравитационным накопителем 25 энергии, соединенным с энергетическими агрегатами 12 и 13 кабельными линиями 26. Входными устройствами накопителя 25 энергии являются мощные автоматически регулируемые выпрямители, представляющие собой переменную нагрузку генератора электрического тока, поглощающую дополнительную мощность, равную ρп.c+ρ (t), чем обеспечивается постоянство частоты, фазы и мощности переменного тока, отдаваемого в распределительную сеть, агрегату 1 выемки грунта и транспортной системе. Эта мощность равна ρa= ρo+ρв+ρт= ρгэт(t)-ρп.c-ρ (t) = const.
Мощные автоматически регулируемые выпрямители управляются сигналами, формируемыми фазовым дискриминатором, на один вход которого подаются электрические колебания эталонного высокостабильного источника напряжения, питающего всю морскую электрическую станцию, а на другой - колебания с выхода умножителя частоты, предназначенного для повышения точности срабатывания дискриминатора и подключенного к генератору электрического тока.
В режиме накопления энергии к выходам указанных мощных выпрямителей подключаются моторы, которые через систему передач вращают рабочий барабан 27, поднимающий основной груз 28 гравитационного накопителя энергии посредством канатов (или цепей) 29 и полиспастов 30.
В режиме разряда накопителя энергии рабочий барабан вращается под воздействием силы тяжести рабочего груза 28 и через систему передач вращает рабочий генератор электрического тока. Вал этого генератора через повышающую систему передач связан с валом высокооборотной синхронной машины, которая через усилители мощности питается от эталонного источника напряжения и с необходимой точностью синхронизирует и синфазирует рабочий генератор. В режиме накопления энергии рабочий генератор на холостом ходу вращается вспомогательным мотором и синхронизируется от синхронной машины, т. е. работает в ждущем режиме. Энергия, отдаваемая накопителем, по кабельным линиям 25 электропередачи поступает на энергетические агрегаты 12 или 13 и по мере необходимости выдается в распределительную сеть, т. е. имеет место рекуперация энергии, затраченной на стабилизацию мощности, частоты и фазы переменного тока, даваемого морской электрической станцией, а также энергии, затраченной на выемку и доставку дополнительного рабочего тела в количестве ν9п= νп.c+ν (t).
На платформе-катамаране 16 может быть установлено два и более гравитационных накопителей энергии. Кроме указанных выпрямителей, на платформе гравитационного накопителя размещается мощный регулируемый выпрямитель кратковременного действия, включающийся при аварийном частичном или полном сбросе нагрузки энергетических агрегатов 12 или 13. Выпрямитель управляется по сигналам, поступающим от измерителя мощности в нагрузке и готов мгновенно принять мощность, равную сброшенной, в результате чего предотвращается возможность возникновения опасных механических перегрузок за счет нарушения баланса моментов сил, приложенных к рабочим колесам или барабанам агрегатов 12 или 13. Нагрузкой этого выпрямителя является охлаждаемый резистор, принимающий большие мощности.
Плавающие платформы 16 выполнены как крупногабаритные бездонные катамараны, корпуса которых разделены на герметические отсеки, заполненные сжатым воздухом. За счет этого возникает плавучесть катамаранов и достигаются необходимые, автоматически регулируемые грузоподъемность и глубина осадки. Требуемое давление воздуха в отсеках обеспечивается вентилями и компрессорами, установленными на борту катамарана, электродвигатели которых могут дистанционно управляться.
Глубина и равномерность осадки катамарана обеспечивается автоматической системой, содержащей измерители осадки, установленные с внешней стороны корпусов, и измерителями давления воздуха в отсеках корпусов катамарана. Измерители формируют электрические сигналы, которые обрабатываются центральным процессором, выдающим команды для управления вентилями и электродвигателями компрессоров.
Грузовая секция 6 транспортной системы 8, двигаясь под нагрузкой и порожняком, имеет существенно различную осадку. В целях оптимизации обводов составного судна 7 энергетической секции 9 придается регулируемая осадка, что достигается путем заполнения балластных полостей забортной водой через управляемые клапаны для увеличения осадки и откачки насосами воды из этих полостей для уменьшения осадки.
Гибкий кабель 11, посредством которого питаются мощные электромоторы, вращающие гребные винты энергетических секций 9, автоматически наматывается на вращающийся барабан при приближении составного суда к плавающей платформе 10 и автоматически разматывается с барабана при удалении от нее. Барабан, наполненный сжатым воздухом, плавает с регулируемой осадкой в отсеке, заполненном забортной водой, вращаясь вокруг оси, закрепленной в корпусе энергетической секции. При наматывании и сматывании кабеля 11 барабан вращается посредством цепной передачи сервиомотором, управляемым по сигналам процессора. Процессор получает сигналы от датчиков натяжения кабеля, а также от датчика скорости движения корабля относительно забортной воды.
Гибкий кабель 11 и кабели линий 14 и 21 электропередачи оборудованы плавсредствами, обеспечивающими расположение кабелей вдоль трассы на заданной глубине, что необходимо для устранения воздействия морских волн и помех морскому транспорту. Плавсредства, состоящие из распределенных и сосредоточенных регулируемых поплавков 15 действуют следующим образом. Кабель 11 линии 14 или 21 электропередачи, идущий от объекта А к объекту В делится на две части, каждая из которых разделяется на участки а1, а2, а3 . . . аn и b1, b2, b3 . . . bm. Участки аi обслуживаются со стороны объекта А, а участки bi - со стороны объекта В. Обслуживание участков состоит в регулировке давления воздуха во внешней оболочке кабеля на каждом участке отдельно посредством вентилей и компрессоров, установленных на объектах А и В и связанных с несообщающимися участками оболочки кабеля посредством гибких труб, по которым подается сжатый воздух и которые проходят вдоль кабеля или внутри него. Каждый участок снабжен измерителем внешнего давления воды, посылающим по линии связи, расположенной в кабеле, электрические сигналы на центральный процессор, который формирует сигналы управления компрессором и вентилем для каждого участка. При этом объем кабеля на каждом участке изменяется так, что конфигурация залегания кабеля под водой становится оптимальной.
Линии 14 и 21 электропередачи большой мощности, кроме распределенных и сосредоточенных поплавков 15, снабжаются сосредоточенными поплавками 31 с большой грузоподъемностью. Поплавки 31 предназначены для увеличения подъемной силы, компенсирующей вес мощных кабелей.
Изобретение иллюстрируется примером конкретного выполнения морской электрической станции (МЭС) с энергетическим агрегатом (ЭА) конвейерного типа (см. фиг. 1 и 2).
1. Основные исходные параметры станции: Полезная мощноcть МЭС ρо = 100 МВт Глубина погружения рабочего тела (РТ) h = 2,5 км Скороcть движения РТ на активном пути v = 5 ˙ 10-3 км/c Раccтояние между агрегатами выемки грунта (АВГ) и ЭА L = 100 км Энергетичеcкие коэффициенты: агрегата выемки грунта Kв = 0,55 МВт(т/c) транспортной системы (ТС) Kт = 2,6 ˙ 10-2L  2,6 МВт/(т/c) АВГ cовмеcтно c ТС Kо = 3,15 МВт/(т/c) Чиcло ЭА, работаю- щих на МЭС Ψ = 4
2,6 МВт/(т/c) АВГ cовмеcтно c ТС Kо = 3,15 МВт/(т/c) Чиcло ЭА, работаю- щих на МЭС Ψ = 4
2. По графикам фиг. 2 определяются следующие параметры: KПД θ = ρo/ρA = 0,86 Суммарная мощноcть четырех ЭА ρA= ρoθ = 116,28 МВт Мощноcть одного ЭА ρΨ= ρA/Ψ = 29 МВт Скороcть раcходо- вания РТ четырьмя ЭА ν = 5,16 т/c Мощноcть, потреб- ляемая АВГ ρв= Квν = 2,84 М Вт Мощноcть, потреб- ляемая ТС ρт= Ктν = 13,41 М Вт Веc РТ на активном пути каждого из четырех ЭА PΨ= ρA/9vΨ = 645 т
3. Параметры РТ и ТС (см. фиг. 1) и график движения грузовых секций (ГС) и энергетических секций (ЭС) [см. фиг. 4] : Веc РТ (гравия) в воде а1 = 1,2 т/м3 Веc влажного РТ в воздухе а2 = 1,92 т/м3 Kоэффициент увели- чения нагрузки ГС cоcтав- ных cоcудов (СС) κ = a2/a1 = 1,6 Kоэффициент, учиты- вающий веc контейне- ров и механизмов погрузки ГС ζ = 1,1 Чиcло платформ ТС α = 2 Чиcло ЭС в cоcтаве ТС ϕ = 4 Скороcть движения СС vт = 25 км/ч Интервал между прибы- тиями СС на ЭА Тcc = L/αvт = 2 ч = 7200 c Дедвейт СС Λcc= ζκνTcc= 66 ˙ 103 т
4. Параметры рабочего органа РО конвейерного типа (расчеты выполнены по правилам Гостехнадзора для класса А4, группы В4 и режима 6М): Материал для гиб- Kомпозиты на ких элементов оcнове cтекло-
волокна, угле-
волокна или бо-
роволокна Временное cопро- тивление материала на раcтяжение σвр≥2000 МПа Средний веc материала в воде  = 1,2 т/м3 Материал для звеньев цепи, крепежных деталей и ковшей Легированная для РТ cталь Временное cопро- тивление материала на раcтяжение σвр≥2000 МПа Веc материала в воде γ = 6,8 т/м3 Kоэффициент запа- cа прочноcти K = 6 Hагруженное cум- марное cечение гиб- ких элементов РО Sро = PΨK/σвр ≃ 200 cм2 Чиcло рядов в РО λ = 2 Чиcло канатов в каждом ряду μ = 8 Площадь рабочего cечения канала Sк = Spo/λμ = 12,5 cм2 Kонcтруктивный учаcток (KУ):
= 1,2 т/м3 Материал для звеньев цепи, крепежных деталей и ковшей Легированная для РТ cталь Временное cопро- тивление материала на раcтяжение σвр≥2000 МПа Веc материала в воде γ = 6,8 т/м3 Kоэффициент запа- cа прочноcти K = 6 Hагруженное cум- марное cечение гиб- ких элементов РО Sро = PΨK/σвр ≃ 200 cм2 Чиcло рядов в РО λ = 2 Чиcло канатов в каждом ряду μ = 8 Площадь рабочего cечения канала Sк = Spo/λμ = 12,5 cм2 Kонcтруктивный учаcток (KУ):
длина l = 50 м
чиcло ковшей на KУ ρку = 1
чиcло поплавков
на KУ Uп = 4 Чиcло ковшей на РО ρpo= 2h/l = 100 Веc РТ в одном ковше Pк= 2PΨ/ρpo = 13 т Объем ковша Vк - 14 м3 Веc ковша в воде при cредней толщине бортов 1 cм Wк = 2,6 т Веc гибких элементов РО на KУ Pl= Spol = 1,2 т Веc крепежа и звеньев цепи РО на KУ Pкр = 0,5 Pl = 0,6 т Суммарный веc РО на длине KУ PΣ = 4,4 г Суммарный объем жидкоcтных (бен- зиновых) поплав- ков, компенcирую- UΣ= PΣ/1-γбенз = 14,1м3; γбенз≃ 0,7 т/м3 щих веc РО на KУ
= 1,2 т Веc крепежа и звеньев цепи РО на KУ Pкр = 0,5 Pl = 0,6 т Суммарный веc РО на длине KУ PΣ = 4,4 г Суммарный объем жидкоcтных (бен- зиновых) поплав- ков, компенcирую- UΣ= PΣ/1-γбенз = 14,1м3; γбенз≃ 0,7 т/м3 щих веc РО на KУ
5. Основные параметры энергетического агрегата (ЭА) с плавающей платформой типа бездонного катамарана: Габариты cупертан- кера (для cравнения) (360х62х36) м Габариты корпуcа катамарана (260х32х30) м Материал корпуcа Железобетон Средняя толщина бортов палубы и переборок  = 0,75 м Веc корпуcа ката- марана Wк.к = 60˙103 т Водоразмещение корпуcа под наг- рузкой W = 208 ˙ 103 т Оcадка корпуcа H = 25 м Половина полного веcа данных креп- лений корпуcов Wкр = 0,25 Wк.к = 15 ˙ 103 т Веc электромеха- ничеcкого обору- дования Wэм = 25 ˙ 103 т Чиcло отcеков (cекций) в корпуcе i = 8 Давление воздуха в отcеках Pв = 3,5 кг/cм2 Веc запаcа РТ на борту корпуcа Wрт = 100 ˙ 103 т Длина линии cцеп- ления РО c зубцами катарактов рабочего колеcа l = 5 м
= 0,75 м Веc корпуcа ката- марана Wк.к = 60˙103 т Водоразмещение корпуcа под наг- рузкой W = 208 ˙ 103 т Оcадка корпуcа H = 25 м Половина полного веcа данных креп- лений корпуcов Wкр = 0,25 Wк.к = 15 ˙ 103 т Веc электромеха- ничеcкого обору- дования Wэм = 25 ˙ 103 т Чиcло отcеков (cекций) в корпуcе i = 8 Давление воздуха в отcеках Pв = 3,5 кг/cм2 Веc запаcа РТ на борту корпуcа Wрт = 100 ˙ 103 т Длина линии cцеп- ления РО c зубцами катарактов рабочего колеcа l = 5 м
6. Основные параметры гравитационного накопителя энергии (ГНЭ), работающего в режиме рекуперации энергии.
Каждый из четырех ЭА МЭС взаимодействует с двумя ГНЭ, один из которых накапливает энергию, а другой отдает накопленную энергию в распределительную сеть. Поcтоянная cоcтав- ляющая мощноcти, подаваемой на ГHЭ ρп.c= 0,15ρϕ≈ 5 М Вт Время разряда ГHЭ Тгнэ = 600 c Макcимальная глубина погруже- ния рабочего груза (РГ) hгнэ = 1 км Веc РГ в воде (железобетонный контейнер c гравием) Ргнэ = 340 т Энергоемкоcть одного ГHЭ Егнэ = ρпc Тгнэ = 3 ˙ 103 МДж Объем материала канатов (или цепей) вне завиcимоcти от кратноcти и чиcла полиcпаcтов V = к/(9σвр)Eгнэ≃ 100 м
При заданных грузоподъемности плавающей платформы и глубине погружения РГ энергоемкость ГНЭ зависит только от прочности и объема материала канатов и может увеличиваться по мере внедрения перспективных высокопрочных композиционных материалов и по мере снижения их стоимости.
7. В примере конкретной реализации МЭС подразумевается использование типовых систем автоматизации, связи и отображения. Подразумевается также использование мощных регулируемых выпрямителей, применяемых в транспортных системах и на предприятиях цветной металлургии. (56) Патент США N 3918827, кл. F 03 G 3/00, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ПРЕОБРАЗУЮЩАЯ ЭНЕРГИЮ ПОТОКОВ ДВУХ СРЕД | 2019 |
|
RU2722760C1 |
| Устройство для накопления электрической энергии в водной среде | 2023 |
|
RU2808329C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИЕЙ ПОТРЕБИТЕЛЕЙ В ЗАКРЫВАЕМЫХ ЛЬДАМИ АКВАТОРИЯХ ШЕЛЬФА И ПОДВОДНАЯ АТОМНАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2399104C2 |
| Устройство для получения электроэнергии в водной среде | 2023 |
|
RU2800340C1 |
| ПОЛУПОГРУЖНАЯ БУРОВАЯ ПЛАТФОРМА КАТАМАРАННОГО ТИПА | 2012 |
|
RU2529098C2 |
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2020 |
|
RU2745173C1 |
| СПОСОБ ПОЛУЧЕНИЯ ВТОРИЧНОГО ЭНЕРГОНОСИТЕЛЯ - ВОДОРОДА ПОСРЕДСТВОМ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВЕТРА | 2014 |
|
RU2567484C1 |
| ВЕТРОВАЯ УСТАНОВКА ДЛЯ ВЫРАБОТКИ ЭЛЕКТРИЧЕСТВА | 2019 |
|
RU2725125C1 |
| СИСТЕМА ДЛЯ ВЫРАБОТКИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2006 |
|
RU2405966C2 |
| САМОХОДНАЯ ПОЛУПОГРУЖНАЯ ОКЕАНОЛОГИЧЕСКАЯ ИССЛЕДОВАТЕЛЬСКАЯ ПЛАТФОРМА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2006 |
|
RU2343084C2 |


Использование: энергетика, в частности гравитационные установки, приводимые в движение твердыми рабочими телами. Сущность изобретения: способ получения электрической энергии заключается в том, что в качестве рабочего тела используется твердое вещество, которое изымается вблизи поверхности моря и погружается в него, при прохождении ко дну преобразуют его потенциальную энергию в электрическую, кроме того, выемку и перевязку рабочего тела производят путем использования части его потенциальной энергии, преобразованной в электрическую энергию. Указанный способ осуществляется устройством, которое содержит комплекс оборудования, состоящий из размещенных на плавающих платформах энергетического агрегата, рабочего органа, который выполнен в виде гибкого элемента с установленными на нем емкостями для твердого рабочего тела, гравитационного накопителя энергии для рекуперации электрической энергии, затрачиваемой в процессе ее производства, составных суден транспортной системы, состоящих из грузовых секций, агрегатов выемки грунта и линий электропередач с плавсредствами. 3 з. п. ф-лы, 4 ил.
