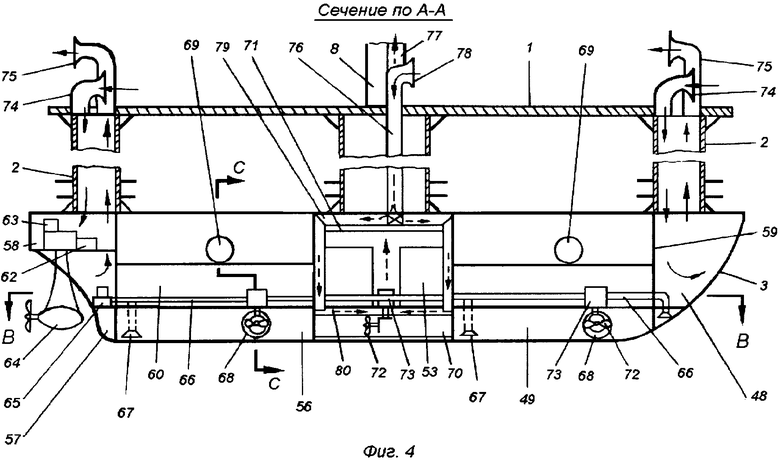
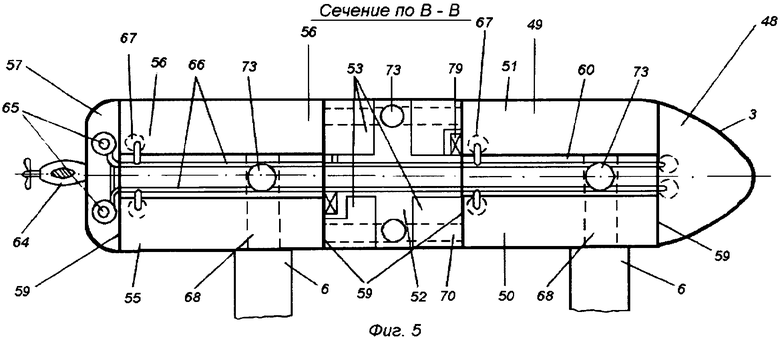
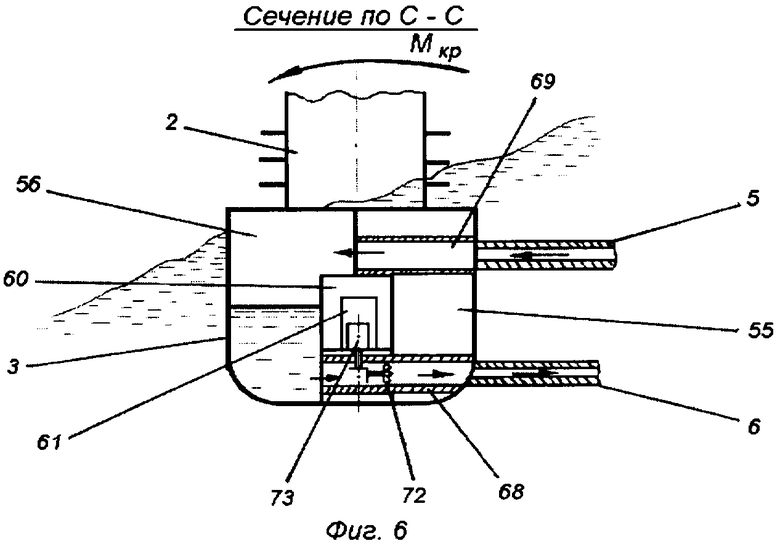
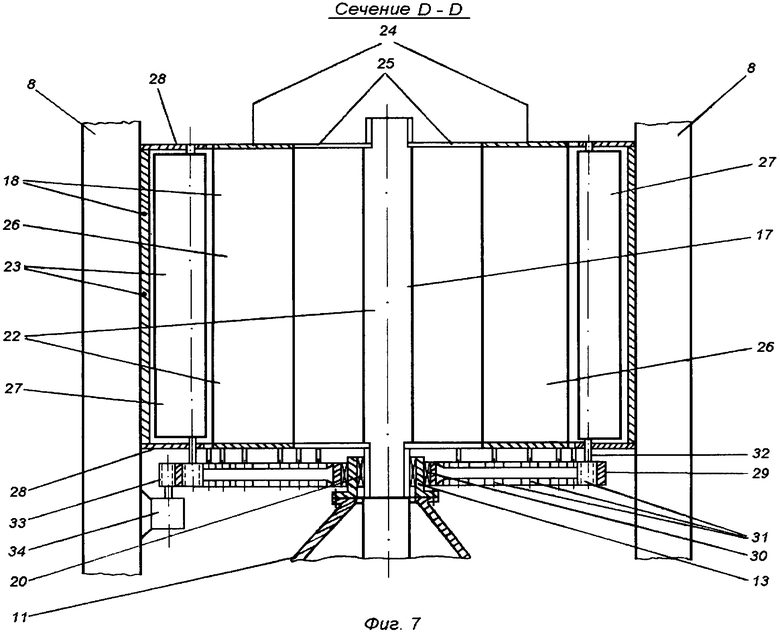
1. Самоходная полупогружная океанологическая исследовательская платформа, содержащая надводную площадку с надстройкой и размещенными на ней вспомогательным и энергетическим оборудованием, вычислительным центром, научно-измерительной, навигационной, радиопередающей аппаратурой, причем энергетическое оборудование выполнено по схеме единой электроэнергетической системы на переменном токе, а сама площадка опирается посредством двух рядов полых колонн, поддерживающих верхнюю конструкцию над водой и имеющих сечение корабельной формы и демпфирующие пластины в их нижней части, на два понтона-катамарана, имеющих обводы водоизмещающего корпуса судна и снабженных каждый емкостями для водяного балласта, балластно-осушительной подсистемой, движительной установкой, рулевым устройством, элементами энергетической установки, а также и двумя рядами полых ребер жесткости, установленных горизонтально между корпусами понтонов катамарана на уровне соответственно их палуб и основных плоскостей, из которых нижние выполнены крыловидными, с выпуклостью, обращенной вверх, и развернутыми под углом атаки к встречному потоку воды, отличающаяся тем, что на надводной площадке в районе мидель-шпангоута установлена П-образная сигнальная мачта, бортовые вертикальные цилиндрические опоры которой выполнены полыми и являются продолжением средних полых колонн платформы; на поперечной горизонтальной площадке сигнальной мачты размещены устройство молниезащиты, комплект надводной научно-измерительной аппаратуры, устройства навигационного комплекса, включая антенну радиолокационной системы, антенны радио- и телепоисковой аппаратуры, радио- и телевещательной установок для круглосуточных метеонаблюдений, мониторинга загрязнения окружающей среды и охраны биоресурсов океана; понтоны катамарана разделены каждый от носа в корму герметичными переборками на пять сообщающихся между собой посредством коридора отсеков, а именно форпик, носовой балластный отсек, центральный отсек, кормовой балластный отсек и ахтерпик, в первом из которых расположено помещение подводной научно-измерительной, навигационной и поисковой аппаратуры, в составе которой имеется гидролокатор, в носовом и кормовом балластных отсеках - балластные емкости для приема переменного водяного балласта, в центральном отсеке - основная электрическая аккумуляторная батарея, выполняющая роль твердого балласта, в ахтерпике - румпельно-движительное отделение, движительная установка которого выполнена в виде азимутального полноповоротного движительно-рулевого комплекса с электроприводами, при этом коридор, ось которого совпадает с продольной осью понтона, в местах его пересечения с герметичными переборками оборудован клинкетными водо- и газонепроницемыми дверями с дистанционным приводом; верхний ряд горизонтально-поперечных полых ребер жесткости выполнен аналогично нижнему ряду таких же ребер жесткости также крыловидным, выпуклостью вверх, и развернутым под углом атаки и смещен в корму относительно нижнего ряда ребер жесткости на половину ширины крыловидного ребра, образуя при этом стоящие друг за другом несколько пар биплановых крыльев-решеток; центральный отсек каждого понтона оборудован подсистемами естественной и принудительной вытяжной вентиляции, где в подсистему естественной вентиляции входит средняя полая колонна, внутренняя полость которой сообщена со стороны нижней части с центральным отсеком понтона, а в верхней части - с атмосферой, а подсистема принудительной вытяжной вентиляции центрального отсека у каждого понтона состоит из приточного и вытяжного воздуховодов, установленных во внутренней полости средней колонны, и вытяжного воздуховода в установленной над нею полой вертикальной опоре сигнальной мачты, с выпускным вентиляционным раструбом, расположенным на вершине этой вертикальной опоры, и вентилятором, встроенным в верхней части воздуховода, с электроприводом, установленным снаружи; платформа содержит балластную систему, которая состоит из двух независимых частей, равных числу понтонов, каждая из которых содержит носовую и кормовую балластные емкости, ограниченные каждая продольной перегородкой на цистерны правого и левого бортов и обслуживающую их балластно-осушительную подсистему, которая содержит приемные и отливной кингстоны забортной воды и балластно-осушительные насосы, из которых один резервный, установленные в помещении ахтерпика и соединенные каждый на стороне приемных патрубков друг с другом и с независимыми коллекторами, выведенными к приемным патрубкам-храпкам, расположенным у кормовых переборок в балластных емкостях правого и левого бортов и в сточных колодцах центрального и концевых отсеков понтона, а на стороне выходных патрубков - с отливным кингстоном, причем приемные кингстоны установлены в концевых отсеках, отливной кингстон - в ахтерпике, все кингстоны и все приемные патрубки-храпки снабжены клапанами с дистанционным управлением, а каждая балластная цистерна в верхней части сообщена посредством уравнительного клапана с дистанционным управлением с центральным отсеком, сообщенным с атмосферой; для усиления стабилизирующего эффекта при штормовой погоде платформа оборудована пассивной системой успокоения килевой и бортовой качки, в которой пассивная подсистема успокоения килевой качки состоит из двух независимых частей, равных числу понтонов, каждая из которых образована двумя парами носовых и кормовых балластных цистерн левого и правого бортов одного понтона и соединяющих их продольных нижнего жидкостного и верхнего воздушного каналов-трубопроводов, снабженных клапанами с дистанционным управлением, а пассивная подсистема успокоения бортовой качки образована парой носовых и парой кормовых балластных цистерн разных понтонов, расположенных с их внешних бортов и соединенных каждая нижним жидкостным и верхним воздушным поперечными каналами, снабженных клапанами с дистанционным управлением, причем в качестве этих каналов использованы горизонтально-поперечные полые крыловидные ребра жесткости, соединяющие корпуса понтонов; в геометрическом центре надводной площадки установлена опорная башня ветроэлектрической установки, состоящая из верхней и нижней цилиндрических секций соответственно с меньшим и большим диаметрами, соединенных фланцами со средней конусообразной секцией, в нижней цилиндрической секции опорной башни большего диаметра расположен вертикально электрический ветрогенератор, вал которого соединен фланцами с вертикальным валом ветротурбины и образует с ним общий вертикальный вал ветроэлектрической установки, вращающийся в трех подшипниковых узлах, а именно нижнем - упорном, расположенном в фундаментной плите надводной площадки, среднем - упорно-опорном, встроенном в верхнюю цилиндрическую секцию опорной башни, верхнем - опорном, установленном в поперечной горизонтальной площадке сигнальной мачты; цилиндрический ротор ветротурбины выполнен в форме «беличьего колеса», в котором между двумя кольцами, закрепленными по торцам ротора на радиальных спицах, жестко закреплены на некотором расстоянии друг от друга вертикальные лопасти, установленные каждая в радиальной плоскости ротора и равномерно распределенные по окружности колец; с наружной стороны ротор опоясан по всей окружности цилиндрическим щелеобразным статором-решеткой, который неподвижно закреплен на внутренних поверхностях вертикальных опор сигнальной мачты, а вертикальные пластины этого неподвижного статора-решетки, образующие щели, выполняют роль направляющих сопел, установлены каждая тангенциально к цилиндрической поверхности ротора вертотурбины и выполнены с возможностью регулируемого поворота относительно своих вертикальных осей; на надводной площадке вокруг опорной башни ветроэлектрической установки расположена одноярусная надстройка с покатым перекрытием, внешние поверхности которого покрыты фотогальваническими пластинами, соединенными электрически последовательно-параллельно и образующими солнечную батарею; к наружным кромкам покатого перекрытия надстройки для увеличения площади солнечной батареи присоединены со всех сторон перекрытия на шарнирах дополнительные крылья с возможностью дистанционного управления углом их установки по отношению к плоскости горизонта, наружные поверхности вертикальных опор и верхняя поверхность горизонтальной площадки сигнальной мачты тоже покрыты фотогальваническими панелями; у носовой кромки надводной площадки установлена симметрично относительно ее продольной оси глубоководная лебедка с контейнером, закрепленным на конце ее несущего кабель-троса и содержащим научно-измерительную аппаратуру для выполнения подводных исследований, включая и оборудование для подводной телесъемки, а для опускания контейнера под воду в надводной площадке имеется проем, оборудованный замковым фиксатором; другой контейнер, предназначенный для взятия проб с поверхности воды, выполнен плавающим на ее поверхности в форме эллипса, симметрично опоясывающего одну из передних полых колонн и свободно перемещающегося при волнении вдоль ее вертикальной оси, при этом плавающий контейнер связан своим кабель-тросом с электроприводным барабаном вьюшки, автоматически выбирающей слабину этого кабель-троса, образующуюся при вертикальных перемещениях плавучего контейнера на волне; энергетическая установка платформы выполнена по схеме единой электроэнергетической системы переменно-постоянного тока и содержит смешанный комплекс нетрадиционных возобновляемых источников энергии переменного и постоянного тока, выпрямители, накопители энергии в виде электрических аккумуляторных батарей напряжением 110 и 24 В, инверторы, трансформаторы напряжения, электрические сети постоянного тока напряжением 110 и 24 В, а также сеть переменного тока частоты 50 Гц напряжением 380 и 220 В, электроприводы азимутальных движительно-рулевых комплексов, глубоководной лебедки и кабель-тросовой вьюшки, комплекс электроприемников собственных нужд платформы, а также научно-измерительной, навигационной, приемопередающей радио- и телеаппаратуры; при этом смешанный комплекс нетрадиционных возобновляемых источников энергии состоит из ветроэлектрической установки ортогонального типа, батареи фотогальванических панелей и волновых гидрогенераторов, причем ветрогенератор с непосредственным приводом от ветротурбины, выполненный на переменном токе, подключен к сборно-распределительным шинам электрической сети постоянного тока напряжением 110 В через управляемые полупроводниковые выпрямители, и параллельно ему к этим же шинам подсоединена электрически через устройство сопряжения батарея фотогальванических элементов, а волновые гидрогенераторы переменного тока, приводимые во вращение от гидротурбин, встроенных в продольные и горизонтально-поперечные жидкостные каналы-трубопроводы пассивных подсистем успокоения килевой и бортовой качки, соединены через полупроводниковые выпрямители параллельно и подключены к сборно-распределительным шинам электрической сети постоянного тока напряжением 24 В; к сборно-распределительным шинам постоянного тока напряжением 110 и 24 В подсоединены через устройства гальванической развязки аккумуляторные батареи соответственно основная напряжением 110 В и аварийная напряжением 24 В, а, кроме того, эти шины соединены между собой через согласующее полупроводниковое устройство напряжения; сборно-распределительные шины постоянного тока напряжением 110 В соединены с электроприводами двух азимутальных движительно-рулевых комплексов, глубоководной лебедки и кабель-тросовой вьюшки, выполненных на переменном токе напряжением 380 В, посредством отдельных автономных инверторов, а с главными шинами переменного тока напряжением 220 В частоты 50 Гц - посредством зависимого инвертора, причем автономные инверторы азимутальных движительно-рулевых комплексов снабжены двумя выходными каналами, а именно на 380 и 220 В, образованными посредством выходного трехобмоточного трансформатора напряжения; к главным шинам переменного тока напряжением 220 В подключены электроприемники собственных нужд платформы, научно-измерительная, навигационная и приемопередающая радио- и телеаппаратура, из которых два электродвигателя подсистемы принудительной вытяжной вентиляции центральных отсеков понтонов катамарана выполнены синхронными и соединены каждый кинематически посредством разобщительной муфты с валом вентилятора, а электрически - посредством пускателя с выходным каналом напряжением 220 В автономного инвертора своего понтона, причем к сборным шинам напряжением 24 В подсоединены электроприемники особо ответственного назначения, включая приемники для работы платформы в автоматическом режиме, а именно комплексная система автоматического управления, контроля и диагностики технического состояния энергетической установки, технологического и вспомогательного оборудования, включающая подсистемы: комплексную подсистему сбора и обработки научных данных, измерения параметров оборудования платформы, газового анализа атмосферы центральных отсеков обоих понтонов, навигации и безопасности мореплавания, радиосвязи и телевещания, управления движением и маневрированием платформы, оживления и управления единой электроэнергетической установкой, диагностики технического состояния энергетического, технологического и вспомогательного оборудования, контроля и аварийно-предупредительной сигнализации нештатных режимов энергетического и технологического оборудования, защиты и управления техническими средствами в нештатных ситуациях, управления балластно-осушительной подсистемой, управления глубоководной лебедкой и электроприводной вьюшкой.2. Способ использования самоходной полупогружной океанологической исследовательской платформы, заключающийся в том, что для доставки платформы в заданный район ее переводят в транспортное крейсерское положение за счет удаления водяного балласта из понтонов посредством балластно-осушительных подсистем, доставляют платформу морским путем в район исследований, с прибытием ее в заданную точку района переводят платформу в стабилизированное полупогруженное положение посредством открытия приемных кингстонов забортной воды и принятия в понтоны водяного балласта, позиционируют платформу в данной точке района с заданными географическими координатами для исследований точечным методом, выполняют по заданной программе посредством научно-измерительной аппаратуры, вычислительного центра и средств связи объем комплексных океанологических и метеорологических исследований, включающих сбор исследуемой информации, ее обработку и передачу в центр управления по каналу радиосвязи, после завершения программы исследований в одной точке перемещают платформу за счет движительной установки своим ходом без всплытия в другую близко расположенную точку района, где ее позиционируют аналогично, а в случае перехода платформы на большое расстояние в другой район исследований ее перемещают, переведя предварительно в транспортное крейсерское положение путем всплытия за счет удаления упомянутого водяного балласта, отличающийся тем, что позиционирование платформы в точке с заданными фиксированными географическими координатами в процессе комплексных океанологических и метеорологических исследований точечным методом выполняют динамическим путем посредством азимутальных движительно-рулевых комплексов и подсистемы управления движением и маневрирования платформы в режиме автоматического управления, при этом периодически вычисляют посредством надводной навигационной аппаратуры текущие географические координаты положения платформы, сравнивают их посредством вычислительного центра с заданными географическими координатами и при выявлении отклонений текущих координат от заданных возвращают платформу в заданную географическую точку посредством азимутальных движительно-рулевых комплексов и подсистемы управления движением и маневрированием платформы, причем дополнительно переводят платформу аналогичным путем за счет удаления части водяного балласта в полукрейсерское положение для предохранения оборудования надводной площадки от повреждений в штормовых условиях, в период которого выполняют при необходимости заряд аварийной аккумуляторной батареи посредством электрических волновых гидрогенераторов, при этом весь объем комплексных океанологических и метеорологических исследований производят путем выполнения ряда частных методов исследований.3. Способ использования по п.2, отличающийся тем, что комплексные океанологические и метеорологические исследования дрейфовым методом выполняют путем выключения азимутальных движительно-рулевых комплексов программно посредством вычислительного центра или по команде, получаемой дистанционно этим центром с судна обеспечения посредством канала радиосвязи, при этом контролируют периодически посредством надводного навигационного комплекса фактическую траекторию дрейфа платформы, сравнивают ее посредством вычислительного центра с программно-заданной траекторией дрейфа и при обнаружении их несовпадения выполняют программно корректировку траектории дрейфа посредством кратковременного включения в работу указанных азимутальных движительно-рулевых комплексов с помощью подсистемы управления движением и маневрированием платформы.4. Способ использования по п.2, отличающийся тем, что при выполнении комплексных океанологических и метеорологических исследований методом по площади вводят дистанционно посредством канала радиосвязи и вычислительного центра программу заданной траектории движения платформы путем продольных, поперечных, диагональных, зигзагообразных галсов либо по периметру, граничные географические координаты исследуемой площади, географические координаты точек перемены галсов, а также скорость движения платформы, частоту выполняемых замеров, характер замеров путем остановки или на ходу, после получения комплексной системой автоматического управления, контроля и диагностики технического состояния энергетической установки, технологического и вспомогательного оборудования дистанционной команды на выполнение программы исследований по площади начинают программные галсовые, например, зигзагообразные, перемещения платформы посредством азимутальных движительно-рулевых комплексов и подсистемы управления движением и маневрированием платформы, при этом периодически контролируют посредством надводного навигационного комплекса текущие галсовый курс платформы и координаты перемещения платформы, сравнивают их посредством вычислительного центра с заданными галсовым курсом и координатами точек перемены галсов, при расхождении текущего и заданного галсовых курсов корректируют курс платформы посредством азимутальных движительно-рулевых комплексов, а при совмещении текущих географических координат с заданными координатами точек перемены галса посылают команду в подсистему управления движением и маневрированием платформы на перемену галса, после чего платформу разворачивают азимутальными движительно-рулевыми комплексами на новый галсовый курс и цикл программно-выполняемых платформой операций повторяют, при совмещении текущих географических координат с заданными координатами конечной граничной точки исследуемой площади азимутальные движительно-рулевые комплексы выключают посредством подсистемы управления движением и маневрированием платформы и посылают посредством канала радиосвязи сигнал на судно обеспечения о завершении выполнения платформой данной частной программы исследования данным частным методом по площади.5. Способ использования по п.2 или 4, отличающийся тем, что при выполнении комплексных исследований методом по объему дополнительно погружают в воду посредством глубоководной лебедки и буксируют под водой посредством кабель-троса контейнер с подводной научно-исследовательской аппаратурой, при этом вводят дистанционно в вычислительный центр посредством канала радиосвязи с судна обеспечения программу заданной траектории подводных перемещений контейнера путем его пилообразных, синусоидальных, трапецеидальных, продольных на разных горизонтах галсов, глубины граничных горизонтов, скорость перемещения платформы и режимы глубоководной лебедки по частоте и направлению вращения барабана на заданных галсах, при этом периодически контролируют посредством подводной навигационной аппаратуры текущие глубины перемещения контейнера на заданном галсе, сравнивают их посредством вычислительного центра с глубиной заданного граничного верхнего или нижнего горизонта, при совпадении сравниваемых глубин посылают посредством вычислительного центра команду в подсистему управления глубоководной лебедкой на перемену галса перемещения контейнера и режима глубоководной лебедки, после чего меняют галс перемещения контейнера и соответствующий ему режим глубоководной лебедкой; при формировании вычислительным центром сигнала о завершения выполнения платформой данной программы исследований данным частным методом по объему в подсистему управления глубоководной лебедкой подают из того же вычислительного центра команду на вывод глубоководной лебедки из работы, по которой указанная подсистема управления включает глубоководную лебедку на подъем, втягивают контейнер в проем надводной площадки платформы и крепят его посредством замкового фиксатора.6. Способ использования по п.2, отличающийся тем, что в процессе комплексных исследований при мониторинге загрязнения поверхности озер, морей и океана нефтью и другими вредными веществами контролируют посредством радиолокационной системы, надводной научно-измерительной и телепоисковой аппаратуры состояние поверхности акватории и состав воздуха, при обнаружении признаков присутствия загрязняющих веществ платформу переключают посредством вычислительного центра в режим исследования размеров пятна загрязнения, направления и скорости его перемещения, для этого, оповестив посредством канала радиосвязи центр управления об обнаруженном загрязнении, вычисляют посредством надводного навигационного комплекса курс к ближайшей боковой границе нефтяного пятна и направляют к ней платформу посредством подсистемы управления движением и маневрированием платформы и азимутальных движительно-рулевых комплексов; достигнув границы пятна загрязнения, платформу переводят в режим дрейфа посредством выключения движительно-рулевых комплексов, опускают посредством электроприводной вьюшки и подсистемы управления ею на поверхность воды плавучий контейнер, берут посредством научно-измерительной аппаратуры пробы поверхностного слоя воды и атмосферного воздуха, выполняют той же научно-измерительной аппаратурой структурный и количественный анализ проб, данные которого оперативно передают в центр управления посредством радиовещательной аппаратуры, а платформу по умолчанию переводят посредством вычислительного центра в режим определения размеров пятна загрязнения, для этого выводят платформу посредством подсистемы управления движением и маневрированием платформы и азимутальных движительно-рулевых комплексов на чистую воду, вычисляют посредством надводного навигационного комплекса координаты исходной точки ее нахождения и новый курс перемещения платформы параллельно видимой границе пятна загрязнения, переводят платформу посредством подсистемы управления движением и маневрированием платформы и азимутальных движительно-рулевых комплексов на новый заданный курс, перемещают ее таким же путем вдоль фронта пятна загрязнения, сохраняя расстояние до этого фронта неизменным, для чего в координатах точек излома границы пятна загрязнения с чистой водой определяют повторно посредством надводного навигационного комплекса координаты этих точек, вычисляют посредством вычислительного центра измененные курсы движения платформы и переводят ее на эти курсы посредством подсистемы управления движением и маневрированием платформы и азимутальных движительно-рулевых комплексов, при этом режим маневрирования платформы выполняют указанным путем до тех пор, пока платформа, пройдя вдоль переднего фронта пятна загрязнения, выйдет на противоположную сторону нефтяного шлейфа в точку, лежащую на одной линии с исходной географической точкой начала движения, причем обработанные данные, содержащие географические координаты точек переднего фронта и его вершины, а также ширину шлейфа пятна загрязнения, оперативно передают посредством радиовещательной аппаратуры в центр управления, по умолчанию платформу программно направляют посредством подсистемы управления движением и маневрированием платформы и азимутальных движительно-рулевых комплексов в вершину дуги переднего фронта пятна загрязнения, перемещают платформу таким же путем по тому же курсу, по которому движется указанная вершина пятна загрязнения, и синхронно с ней, вычисляют периодически посредством надводного навигационного комплекса координаты траектории и скорость перемещения вершины пятна загрязнения, которые посылают в центр управления по каналу радиосвязи, по завершении операций взятия проб с поверхности воды плавучий контейнер платформы подтягивают посредством электроприводной вьюшки в проем нижней поверхности надводной площадки и крепят его посредством замкового фиксатора.7. Способ использования по п.2, отличающийся тем что в процессе комплексных исследований при охране биоресурсов водных бассейнов от браконьеров патрулируют заданный квадрат посредством программно-заданных перемещений платформы, для чего вводят дистанционно в программу вычислительного центра посредством канала радиосвязи географические координаты граничных точек патрулируемого квадрата, траекторию движения платформы путем продольных, поперечных, диагональных, зигзагообразных галсов либо по периметру квадрата, а также и скорость движения платформы, при этом проводят активный поиск объектов браконьерского промысла посредством радиопоисковой аппаратуры, радио- и гидролокационной систем, запроса и анализа информации со спутников посредством спутниковых радио- и навигационных систем, при обнаружении одного или нескольких подозрительных надводных объектов вычисляют посредством надводного навигационного комплекса координаты местонахождения этих объектов и элементы движения, как то курс, скорость и дрейф, обнаруженных объектов, определяют программно посредством вычислительного центра и того же навигационного комплекса приоритетный объект и курс к нему, направляют платформу посредством подсистемы управления движением и маневрированием платформы и азимутальных движительно-рулевых комплексов на сближение с указанным приоритетным объектом и оповещают посредством канала радиосвязи о предпринятых действиях центр управления, определят посредством радиолокационной системы расстояние до приоритетного объекта, сблизившись с объектом на расстояние видимости телекамер и приборов ночного видения, переводят платформу посредством тех же подсистемы управления движением и маневрированием платформы и азимутальных движительно-рулевых комплексов на режим медленной циркуляции вокруг объекта, включают программно посредством вычислительного центра наружные телекамеры и телевещательную установку в режим съемки, передачи в прямой эфир и запись на видеокассету опознавательных знаков, поведения и действий объекта, продолжают прослушивать посредством радиостанции и включают программно посредством вычислительного центра запись на аудиокассету всех переговоров, проводимых экипажем объекта через радиоэфир, при этом средства теле- и радиослежения не выключают до прибытия судна обеспечения, причем при обнаружении под водой посредством гидролокатора объектов, похожих на браконьерские снасти, вычисляют посредством подводной навигационной аппаратуры координаты местонахождения подводного объекта и курс к нему, передают эти сведения посредством канала радиосвязи в центр управления, после чего программно посредством вычислительного центра, подсистемы управления движением и маневрированием платформы и азимутальных движительно-рулевых комплексов направляют платформу в указанное место, продолжая гидролокационные наблюдения, определяют посредством гидролокатора дистанцию до обнаруженного объекта, после приближения к нему на расстояние видимости подводной телекамеры, платформу переводят программно в дрейф путем выключения азимутальных движительно-рулевых комплексов и опускают посредством глубоководной лебедки контейнер с подводной телекамерой, включив которую программно посредством вычислительного центра и переведя платформу посредством азимутальных движительно-рулевых комплексов на малый ход, продолжают сближение с объектом, производят посредством телепоисковой аппаратуры визуальное обследование места, в котором находится подозрительный объект, и, обнаружив его, гидролокатор выключают программно и включают программно посредством вычислительного центра телевещательную установку на передачу телеизображения в прямой эфир и запись его на видеокассету, а платформу перемещают посредством подсистемы управления движением и маневрированием платформы по периметру подводного объекта с целью его идентификации и определения линейных размеров посредством подводной телеустановки, при этом, завершив циркуляцию, платформу переводят в дрейф посредством выключения азимутальных движительно-рулевых комплексов, телевещательную установку то же выключают программно и ждут дальнейших указаний из центра управления, причем указанные программные действия сопровождают контролем остаточной емкости основной и аварийной аккумуляторных батарей посредством подсистемы контроля и аварийно-предупредительной сигнализации нештатных режимов энергетического и технологического оборудования, сравнивают посредством вычислительного центра текущую остаточную емкость этих батарей с заданной минимально допустимой, при совпадении их значений переводят платформу посредством подсистемы управления движением и маневрированием платформы и азимутальных движительно-рулевых комплексов в режим дрейфа, в течение которого производят зарядку основной и аварийной аккумуляторных батарей посредством ветрогенератора и/или солнечной батареи, при этом в режиме дрейфа платформы не прекращают поиск надводных и подводных объектов посредством радиопоисковой аппаратуры, радио- и гидролокационных систем, спутниковой связи.