Изобретение относится к спортивному тренировочному инвентарю, в частности к устройствам для тренировки спортсменов.
Наиболее эффективными современными техническими средствами тренировки спортсменов являются устройства и приспособления, обеспечивающие воздействие на опорно-двигательный аппарат ударной нагрузкой. Управление (или регулирование) данной нагрузкой осуществляют за счет изменения кинетической энергии падающего на звенья спортсмена груза или тела самого спортсмена после его прыжка вниз с определенной высоты.
Известно устройство для обеспечения ударной нагрузки на звенья спортсмена, состоящее из направляющих рельс, расположенных вертикально и перпендикулярно к горизонтальной площадке для размещения спортсмена, рабочей каретки, падающей на спортсмена с определенной высоты, и буферной каретки, которую фиксирует своими звеньями спортсмены и которая предназначена для взаимодействия с рабочей кареткой.
На этом устройстве, рассматриваемом в качестве аналога, спортсмен может отрабатывать движения типа отталкивания груза (рабочей каретки) руками или ногами после его (ее) падения с определенной, заданной тренером высоты.
Однако данное устройство имеет ряд недостатков: ограниченность тренируемых движений (только движения типа отталкивания), невозможность обеспечения принудительного перемещения звеньев тела спортсмена по заданной программе и, как следствие, невозможность изменения интенсивности нагрузки без изменения кинематических характеристик звеньев, выполняющих отталкивание груза, и высот его взлета при падении с определенной высоты, большая вероятность получения травм при использовании большого груза и особенно большой высоты его падения.
Известно устройство для тренировки мышц спортсменов, содержащее опору, на которой установлена с возможностью поворота и фиксации в различных положениях платформа для размещения спортсмена со стойками-рукоятками для закрепления его звеньев, установленные на опоре с возможностью вращения рычаги с противовесами, поперечными стержнями и приводом, установленные на корпусах рычагов датчики давления, электрически связанные с электронным блоком управления, включающим программный, вычислительный и информационно-визуальный блоки.
Данное устройство, принятое за прототип, позволяет отрабатывать практически все суставные движения, обеспечивает принудительное перемещение звеньев тела спортсмена по заданной программе и возможность варьировать интенсивность мышечных напряжений без изменения кинематических характеристик звеньев, причем дает возможность осуществлять контроль за проявлением двигательных способностей.
Однако это устройство не позволяет обеспечить ударную нагрузку на звенья тела спортсмена.
Цель изобретения - повышение эффективности тренировки.
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел I на фиг. 2; на фиг. 4 - вид Б на фиг. 2; на фиг. 5 - вид В на фиг. 3; на фиг. 6 и 7 - схемы, иллюстрирующие примеры использования устройства.
Устройство содержит опору 1, на котором с помощью скоб 2 подвижно укреплена рама 3 с направляющими 4, по которым может перемещаться с возможностью фиксации платформа 5 для спортсмена. Фиксация платформы 5 к направляющим 4 осуществляется зажимами 6. Рама 3 с направляющими 4 и платформой 5 имеет возможность поворота из горизонтального в вертикальное положение и фиксации в нем и в промежуточных положениях посредством регулируемых по длине тяг 7 и зажимов 8. На платформе 5 установлены с возможностью перемещения в ее продольных пазах 9 узел для закрепления конечностей спортсмена, выполненный в виде рукоятки 10.
На раме 3 установлены с возможностью вращения регулируемые по длине приводные поворотные рычаги 11, образующие с рамой 3 П-образную поворотную рамку 12, которая с помощью пружин 13 связана с противоположной от места установки поворотной рамки 12 частью опоры 1.
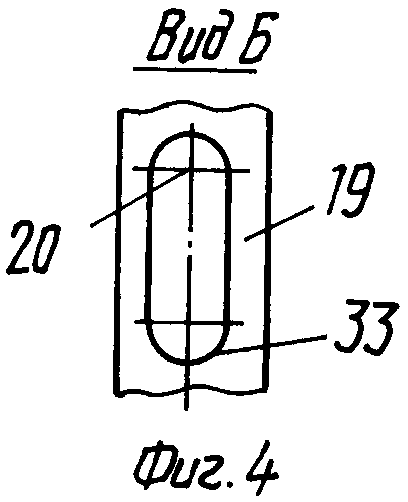
На оси 14 П-образной поворотной рамки 12 установлен привод 15 (например, шаговый двигатель), связанный электрически с включателем 16 (фиг. 3). На поворотных рычагах П-образной поворотной рамки установлены с возможностью скольжения вдоль них, связанные между собой горизонтальной перекладиной 17 (см. фиг. 2) втулочные элементы 18 с вертикальными проушинами 19, имеющими отверстия 20. В отверстия 20 вставлен горизонтальный стержень 21, связанный с краями вертикальных проушин 19 пружинами 22, имеющий выступы 23 для исключения перпендикулярных к поворотным рычагам П-образной поворотной рамки 22 перемещений стержня 21 и фиксирующий, выполненный в виде полусферы приемник 24 падающего груза 25, а также средства 26 для закрепления звеньев спортсмена.
Концевые участки горизонтального стержня 21 выполнены с отогнутыми под углом 90о концами (параллельно отверстиям 20 в вертикальных проушинах 19) и заканчиваются муфтами 27 для изменения длины концевых участков стержня 21. На втулочных элементах 18 установлены средства фиксации 28 поворотных рычагов 11 к горизонтальным кронштейнам 29, закрепленным на вертикальной панели.
Груз 25 находится на переставном лотке 30, высота расположения которого изменяется с помощью кронштейна 31. На опоре 1 укреплена ловушка 32 для груза 25.
В нижних частях отверстий 20 вертикальных проушин 19 установлены датчики фиксации нагрузки 33 (фиг. 4), электрически связанные с блоком управления, включающим программный и информационно-визуальный блоки 34 (программный блок может содержать генератор прямоугольных импульсов, двоичный счетчик, постоянное запоминающее устройство, транзисторные ключи, подключенные к обмоткам управления привода 15, а информационно-визуальный блок может быть представлен светолучевым осциллографом Н-115. Более подробное описание программного и информационно-визуального блоков дано в прототипе).
Каждое средство фиксации 28 поворотных рычагов 11 к кронштейнам 29 состоит из (фиг. 3 и 5) корпуса 35, подпружиненной оси 36, расположенной в корпусе 35 с возможностью осевого перемещения, двух пружин 37, размещенных на оси с двух сторон от корпуса 35 между опорным кольцом 38 и скобой 39, в которой шарнирно установлен пластинчатый ограничитель 40 продольного перемещения оси 36, подпружиненный двумя пружинами 41. Пластинчатый ограничитель 40 и пружины 41 укреплены на осях 42, зафиксированных стопорными шайбами 43 в основании скобы. Пластинчатый ограничитель 40 продольного перемещением оси 36 взаимодействует с установленным в основании скобы включателем 16 привода 15 поворотных рычагов.
Устройство работает следующим образом.
Перед тренировкой проводят настройку устройства, исходя из подготовленности спортсменов. Подбирают величину груза 25, высоту крепления переставного лотка 30 с помощью кронштейна 31, чем задают величину кинетической энергии свободного падения груза 25. Затем определяют режим работы программного блока 34, привода 15, подбирают пружины 13 необходимой упругости, чем задают необходимые кинематические и динамические характеристики отрабатываемых суставных движений (перемещений звеньев) спортсменов и скорость вылета груза 25 в момент прекращения его связи с приемником 24. С помощью муфт 27 устанавливают длину концевых участков горизонтального стержня 21, чем задают величину его амортизационного пути и, как следствие, пути приемника 24 после падения на него груза 25.
Затем с помощью зажимов 6, направляющих 4 рамы 3, скоб 2 регулируемых по длине тяг 7 и зажимов 8 устанавливают необходимое положение платформы 5 для размещения спортсменов, а в продольных пазах 9 закрепляют рукоятками 10 для закрепления спортсмена.
Исходя из длины звена (или звеньев) спортсменов, втулочные элементы 18 перемещают вдоль поворотных рычагов П-образной поворотной рамки 12, корректируют длины выступающих частей горизонтальных кронштейнов 29 и с помощью средства фиксации 28 фиксируют втулочные элементы 18 и поворотные рычаги 11 П-образной поворотной рамки 12 к горизонтальным кронштейнам 29. Для этого поворотную рамку 12 опускают вниз до такого положения, когда средства фиксации 28 окажутся ниже горизонтальных кронштейнов 29. Затем, преодолевая силу натяжения пружин 42, поворачивают пластинчатый ограничитель 40 вокруг оси 42 до горизонтального положения. После чего поднимают П-образную поворотную рамку 12 до зацепления пластинчатых ограничителей 40 горизонтальными кронштейнами 29.
При этом горизонтальный стержень 21 под действием пружин 22 находится вместе с приемником 24 груза 25 и средствами 26 для закрепления звеньев спортсмена в верхней части отверстий 20 проушин 19. В завершении подготовки устройства корректируют положение ловушки 32 груза 25.
Для примера рассмотрим тренировку спортсмена для отработки бросковых движений в плечевых суставах. В этом случае платформа 5 устанавливается горизонтально. Спортсмен располагается на ней в положении лежа на спине руки вверх по направлению головой к П-образной поворотной рамке 12 так, чтобы оси плечевых суставов находились над осью 4, с помощью рукояток 10 закрепляют ноги, а с помощью узла 26 - кисти руки. При этом поворотные рычаги 11 П-образной поворотной рамки 12 с помощью средства фиксации 28 втулочных элементов 18 и горизонтальных кронштейнов 29 закрепляются в горизонтальном положении - параллельно рукам спортсмена.
После этого начинается тренировка.
Тренер (или ассистент) слегка подталкивает груз 25, который скатывается с переставного лотка 30 и в результате свободного падения набирает необходимую скорость перед взаимодействием с приемником 24 (поскольку масса груза 25 известна, высота расположения лотка 30 определяет величину его кинетической энергии).
В результате свободного падения груз 25 попадает в приемник 24, воздействует на горизонтальный стержень 21, растягивает пружины 22 и через муфты 27 ударяет по средству фиксации 28 оси 36. В результате этого удара происходит сжатие расположенной над корпусом 35 пружины 37 и опускание оси 36 относительно корпуса 35 вниз. При этом пластинчатый ограничитель 40 освобождается от действия горизонтального кронштейна 29 и под действием пружин 42 поворачивается до положения, изображенного на фиг. 3. В результате происходит расцепление втулочных элементов 18, поворотных рычагов П-образной поворотной рамки 12 с горизонтальными кронштейнами 29 и за счет воздействия пластинчатого ограничителя 40 на включатель 16 включение привода 15.
Под действием привода 15, пружин 13 и активных усилий спортсмена происходит вращение его рук и заданного броска груза 25, который после полета попадает в ловушку 32 и скатывается вниз. При броске втулочные элементы 18 свободно скользят вдоль поворотных рычагов 11 П-образной поворотной рамки 12.
В процессе тренировки возможны следующие варианты:
1) спортсмен самостоятельно выполняет заданный бросок груза 25;
2) для осуществления заданного броска груза 25 устройство оказывает спортсмену необходимую помощь, вплоть до выполнения броска за спортсмена (в случае, когда спортсмен полностью пассивен).
В первом случае спортсмен после погашения скорости падения груза и расцепления с помощью средства фиксации 28 втулочных элементов 18 и поворотных рычагов 11 П-образной поворотной рамки 12 с горизонтальными кронштейнами 29 выполняет бросок груза 25, не допуская опускания горизонтального стержня 21 в нижние части отверстий 20 вертикальных проушин 19 и его касания втулочных элементов 18 и поворотных рычагов. Во время такого броска перемещение поворотных рычагов 11 и П-образной поворотной рамки 12, осуществляемое под действием привода 15 и пружин 13, происходит параллельно с перемещением рук. Другими словами, в этом случае перемещения поворотных рычагов 11 и рук спортсмена происходят независимо друг от друга.
Во втором случае, когда активность спортсмена недостаточна (или вообще отсутствует) горизонтальный стержень 21 после расцепления втулочных элементов 18 и поворотных рычагов 11 с горизонтальными кронштейнами 29, включения привода 15 и освобождение пружин 13 либо продолжает движение вниз - в нижние части отверстий 20 вертикальных проушин 19 - до опоры на втулочные элементы 18, а через них на поворотные рычаги 11, либо остается на месте и "догоняется" поворотными рычагами 11, которые воздействуют на горизонтальный стержень 21 через втулочные элементы 18 нижними поверхностями отверстий 20 вертикальных проушин 19. Поворотные рычаги 11 за счет привода 15 и пружин 13 оказывают спортсмену необходимую помощью и обеспечивают заданную кинематику перемещения его звеньев (в данном случае рук) и скорость вылета груза 25 независимо от активности спортсмена.
Величина помощи фиксируется с помощью датчиков фиксации нагрузки 33 и представляется на информационно-визуальном блоке 34.
После выполнения броска груз 25 помещается на переставной лоток 30, втулочные элементы 18 и поворотные рычаги с помощью средств фиксации 28 укрепляются к горизонтальным кронштейнам 29.
Спортсмен при этом помогает действию пружин 22 и прижимает стержень 21 к верхним поверхностям отверстий 20 вертикальных проушин 19. Затем осуществляется следующий бросок и так далее.
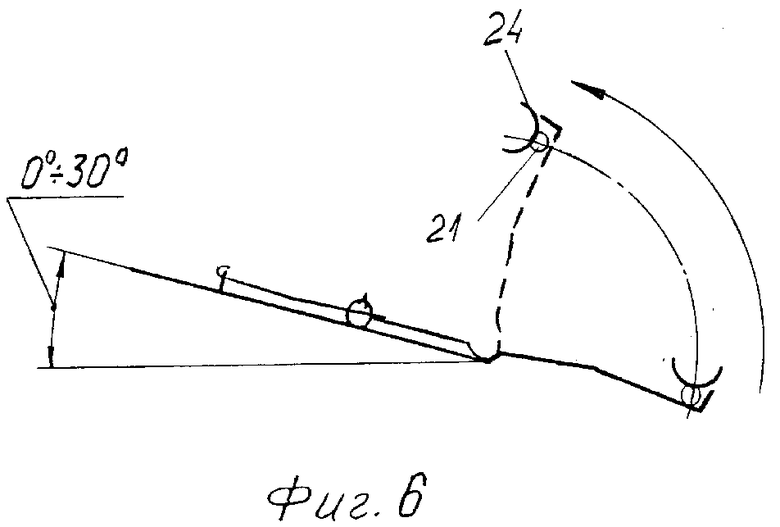
На фиг. 6 и 7 показаны варианты расположения платформы (30о к горизонтали) и отработки ударных движений в тазобедренных (фиг. 6) и плечевых (фиг. 7) суставах.
Таким образом, устройство позволяет повысить эффективность тренировки за счет обеспечения ударной нагрузки на звенья спортсмена и позволяет:
отрабатывать движения практически во всех суставах;
по желанию спортсмена изменять интенсивность нагрузки при падении груза с определенной высоты, сохраняя кинематические характеристики звеньев, выполняющих бросковое движение, а также скорость вылета груза;
значительно сократить вероятность получения травм при использовании нагрузок ударного типа. (56) Авторское свидетельство СССР N 1710084, кл. A 63 B 21/06, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тренировки гимнастов | 1991 |
|
SU1776419A1 |
| Устройство для тренировки мышц спортсменов | 1989 |
|
SU1710084A1 |
| Устройство для тренировки гимнастов | 1987 |
|
SU1574229A1 |
| ТРЕНАЖЕР | 1991 |
|
RU2016599C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ БОРЦОВ | 1998 |
|
RU2140312C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ БОРЦОВ | 1994 |
|
RU2079323C1 |
| Устройство для тренировки спортсменов | 1988 |
|
SU1602556A1 |
| Способ тренировки мышечной системы спортсменов | 1988 |
|
SU1662590A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ БОРЦОВ | 1998 |
|
RU2140313C1 |
| Устройство для тренировки спортсменов-единоборцев | 1991 |
|
SU1831348A3 |





Устройство содержит опору со стойками, на которых установлена поворотная рама с размещенной на ней платформой для спортсмена и узлы для закрепления конечностей спортсмена. Один их них установлен на раме посредством пары параллельно расположенных поворотных, регулируемых по длине рычагов, которые образуют с рамой П-образную поворотную рамку, а другой размещен на платформе. Устройство содержит вертикальную панель с горизонтальными кронштейнами, взаимодействующими с поворотными рычагами П-образной поворотной рамки, и установленный над ними переставной лоток, на котором размещен подающий груз. П-образная поворотная рамка содержит приемник груза. Стойки имеют ловушку для груза, а П-образная рамка соединена со стойками посредством пружин. 1 з. п. ф-лы, 7 ил.
