Изобретение относится к автотракторостроению и может быть использовано в межколесном приводе переднеприводных автомобилей и тракторов.
Известен самоблокирующийся дифференциал транспортного средства, содержащий установленные в корпусе полуосевые шестерни, находящиеся в зацеплении с сателлитами, установленные с возможностью вращения на осях, фиксируемых в отверстиях корпуса со взаимным смещением осей, причем ось сателлита зафиксирована в корпусе с помощью втулки, установленной в отверстии корпуса и имеющей в торце смещенное относительно своей продольной оси сквозное отверстие, в котором расположена ось сателлита.
К недостаткам известного устройства относится нарушение совмещения вершин делительных конусов зубьев сопрягаемых колес, что может привести к аварийному износу.
Наиболее близким к предложенному устройству по технической сущности и достигаемому эффекту является конический дифференциал, выбранный в качестве прототипа, содержащий корпус и соосно расположенные полуосевые шестерни с находящимися с ними в зацеплении сателлитами, установленными на закрепленных в корпусе осях, причем конус зубчатого венца каждого сателлита сверху и снизу ограничен плоскостями, расположенными под углом к плоскости, перпендикулярной оси вращения сателлита, а сателлиты введены в зацепление с соответствующими полуосевыми шестернями на одинаковом расстоянии от оси вращения последних.
Недостатком прототипа являются ограниченные блокирующие свойства дифференциала, обусловленные пределами пульсации величины, реализуемого при буксовании крутящего момента, так, например, если одно из колес транспортного средства будет находиться на льду, то величина крутящего момента, реализуемого этим колесом, выйдет за пределы возможностей дифференциала и колесо будет продолжать буксовать с пульсирующей скоростью вращения.
Целью изобретения является повышение блокирующих свойств дифференциала.
Поставленная цель достигается тем, что в коническом дифференциале, содержащем корпус с оппозитно расположенными полуосевыми шестернями и находящиеся с ними в зацеплении сателлиты, установленные на закрепленной в корпусе оси, геометрические оси шестерен расположены в корпусе дифференциала с угловым смещением относительно геометрической оси вращения корпуса, причем величина этого смещения равна 15-30', а сателлиты снабжены пружинами.
Расположение полуосевых шестерен с угловым смещением их геометрических осей относительно геометрической оси вращения корпуса на величину смещения 15-30' и снабжение сателлитов пружинами создает зауженную зону между шестернями, при прохождении которой во время буксования одного колеса сателлит, используя упругие свойства пружины, перемещается по оси и захватывает противолежащую буксующей шестерню, продолжая вращаться с двумя шестернями, что повышает блокирующие свойства дифференциала.
Вышеуказанные признаки отличают предлагаемое устройство от прототипа и обуславливают его соответствие критериям "новизна" и "положительный эффект".
Признак "Геометрические оси шестерен расположены в корпусе дифференциала с угловым смещением относительно геометрической оси вращения корпуса" является неизвестным, следовательно, вся совокупность признаков обладает критерием "существенные отличия".
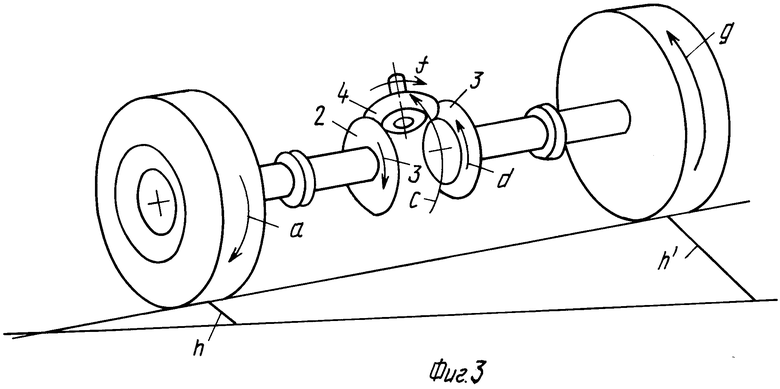
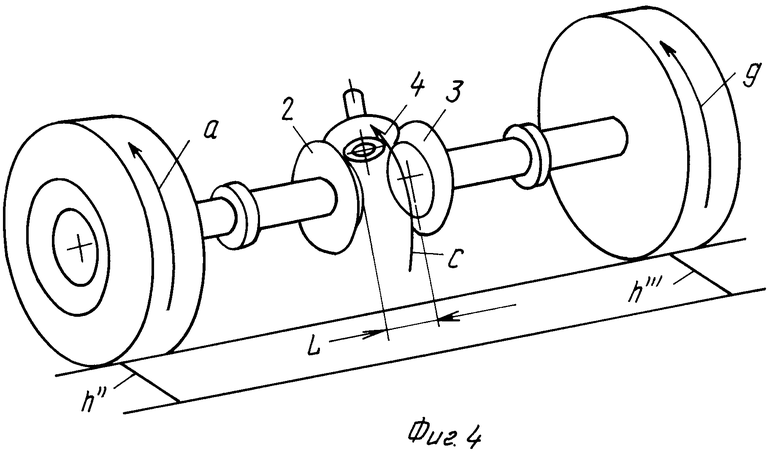
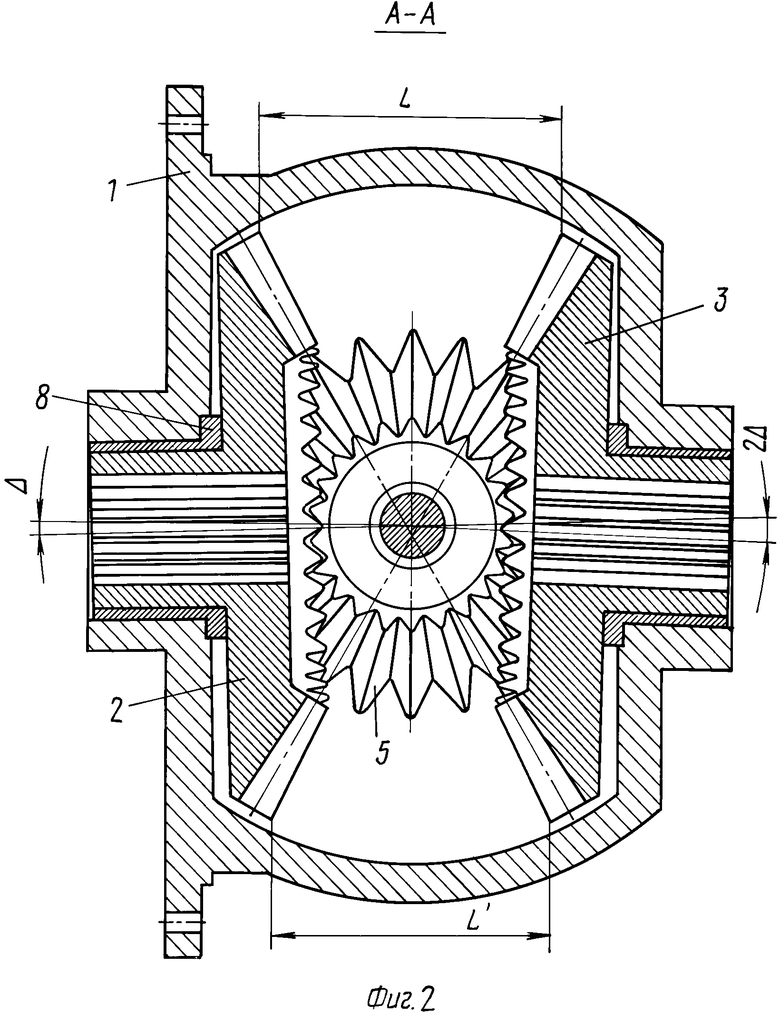
На фиг. 1 изображен в разрезе конический дифференциал, разрезанный вдоль оси сателлитов; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - взаимное перемещение элементов механизма дифференциала при прохождении транспортным средством криволинейного участка дороги; на фиг. 4 - взаимодействие элементов дифференциала при движении транспортного средства по прямому участку дороги.
Конический дифференциал содержит корпус 1, полуосевые шестерни и2 и 3, сателлиты 4 и 5, установленные на оси 6 и подпружиненные тарельчатыми пружинами 7. В корпусе 1 в гнездах закреплены втулки 8 полуосевых шестерен и кольца 9. Профиль зубьев зубчатых колес - эвольвентный. Гнезда под втулки 8 в корпусе 1 обработаны таким образом, что геометрические оси шестерен относительно геометрической оси вращения корпуса образуют угловое смещение, равное Δ в пределах от 15-30' , а между осями вращения полуосевых шестерен, в плоскости, проходящей через геометрические оси вращения полуосевых шестерен, образуется угол, равный 2 Δ, и два участка расстояний между зубьями шестерен и сателлитов, равные L и L', которые находятся между собой в зависимости: L' < L.
Осевой зазор l сателлитов, равный 0,25-0,5 мм регулируют подбором колец 9. Тарельчатые пружины 7 подбирают таким образом, что угловое смещение компенсируется возможностью осевого перемещения сателлитов в пределах 0,25-0,5 мм, не нарушая характера зацепления сателлитов с полуосевыми шестернями.
Дифференциал работает следующим образом.
При прямолинейном движении транспортного средства (см. фиг. 4) корпус дифференциала 1 и сателлиты 4 и 5 имеют одинаковую угловую скорость, равную С, а сателлит 4 находится в зоне размера L' и передает обеим полуосевым шестерням свою угловую скоpость, т. е. возникает закономерность с = а = q, и транспортное средство каждым колесом проходит участок пути в единицу времени равную h'' = h''' , т. е. дифференциал заблокирован.
Пpи попадании одного из колес на участок дороги с меньшим коэффициентом сцепления, относительно колеса, которое зацеплено с дорогой лучше, не может произойти обкатывание сателлита 4, т. к. он не может пройти сам участок L '-заклинивается и увлекает за собой колесо с меньшим коэффициентом сцепления с дорогой. Происходит самоблокирование дифференциала, в этом случае корпус дифференциала через заклинившийся сателлит и парный ему, расположенный на одной с ним оси передает крутящий момент на оба колеса, независимо от коэффициента сцепления колес с дорогой.
При движении транспортного средства по криволинейной траектории (например, при входе в левый поворот), полуосевая шестерня 3 становится забегающей и ее угловая скорость d равна угловой скорости правого колеса q, и при этом стремится повернуться относительно корпуса 1 дифференциала, поворачивает на некоторый угол сателлиты 4 и 5, а те, в свою очередь, поворачивают полуосевую шестерню 2, в обратном направлении вращения шестерни 3, при этом (мгновенные) угловые скорости f, d и b направлены в противоположные стороны, а угловые скорости левого колеса и его полуосевой шестерни h и b меньше угловых скоростей правого колеса и его полуосевой шестерни, т. е. возникает зависимость h = = b < d = q; h < h '.
При наезде одного из колес на препятствие в виде бугорка, камня, выбоины, угловая скорость этого колеса резко изменяется, т. е. может резко возрасти или уменьшиться, при этом в классическом известном дифференциале полуосевая шестерня обкатывается вместе с сателлитами по противолежащей полуосевой шестерне. В предложенной конструкции этот процесс происходит так.
Та из полуосевых шестерен, которая обгоняет, например, противолежащую, воздействует на сателлит, находящийся в зоне размера L' , давление на зубья сателлита возрастают, и сателлит, благодаря конической форме расположения зубьев, сжимает пружины 7, перемещаясь вдоль оси 6, удаляясь от центра дифференциала, получает возможность пройти наиболее узкий (L ') участок между полуосевыми шестернями и, обкатываясь по отстающей шестерне, компенсирует разницу в длинах проходимых участков дороги. Пружины 7 возвращают дифференциал в заблокированное состояние.
Таким образом, процесс прохождения транспортным средством криволинейного участка и неровностей дороги осуществляется при разблокированном дифференциале, что снижает нагруженность узлов привода и колес. Дифференциал остается заблокированным при попадании одного из колес в худшие сцепные условия и обеспечивает повышение проходимости, а разблокируется только при возникновении кинематического рассогласования угловых скоростей вращения ведущих колес при повороте и при движении транспортного средства по неровностям дороги.
Предложенное устройство, по сравнению с прототипом, позволяет более полно использовать блокирующие свойства дифференциала, т. к. реализовать крутящий момент колеса с худшими сцепными с дорогой параметрами в прототипе можно только в пределах пульсации крутящего момента дифференциала. В предложенном же устройстве крутящий момент корпуса дифференциала реализуется независимо от сцепных условий колес с дорогой и зависит только от усилия пружин и угла пересечения полуосей. (56) Авторское свидетельство СССР N 1521625, кл. В 60 К 17/20, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНИЧЕСКИЙ ДИФФЕРЕНЦИАЛ | 2007 |
|
RU2341385C2 |
| Самоблокирующийся дифференциал транспортного средства | 1988 |
|
SU1585179A1 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ С ДОПОЛНИТЕЛЬНЫМИ СВОБОДНЫМИ САТЕЛЛИТАМИ | 2011 |
|
RU2465499C1 |
| Самоблокирующийся дифференциал транспортного средства | 1988 |
|
SU1614950A1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА В.П.ДЕМИНА | 1989 |
|
RU2010138C1 |
| ДИФФЕРЕНЦИАЛ В.П.ДЕМИНА | 1997 |
|
RU2129232C1 |
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2548237C1 |
| Самоблокирующийся дифференциал транспортного средства | 1987 |
|
SU1428604A1 |
| ДИФФЕРЕНЦИАЛ | 2008 |
|
RU2397390C1 |
| Самоблокирующийся дифференциал транспортного средства | 1989 |
|
SU1691158A1 |
Изобретение относится к автотракторостроению и может быть использовано в межколесном приводе переднеприводных автомобилей и тракторов. Сущность изобретения: в корпусе 1 расположены оппозитно шестерни 2 и 3, геометрические оси которых смещены относительно геометрической оси вращения корпуса на угол 15 - 30, с шестернями 2 и 3 находятся в зацеплении сателлиты 4 и 5, снабженные пружинами 7. 4 ил.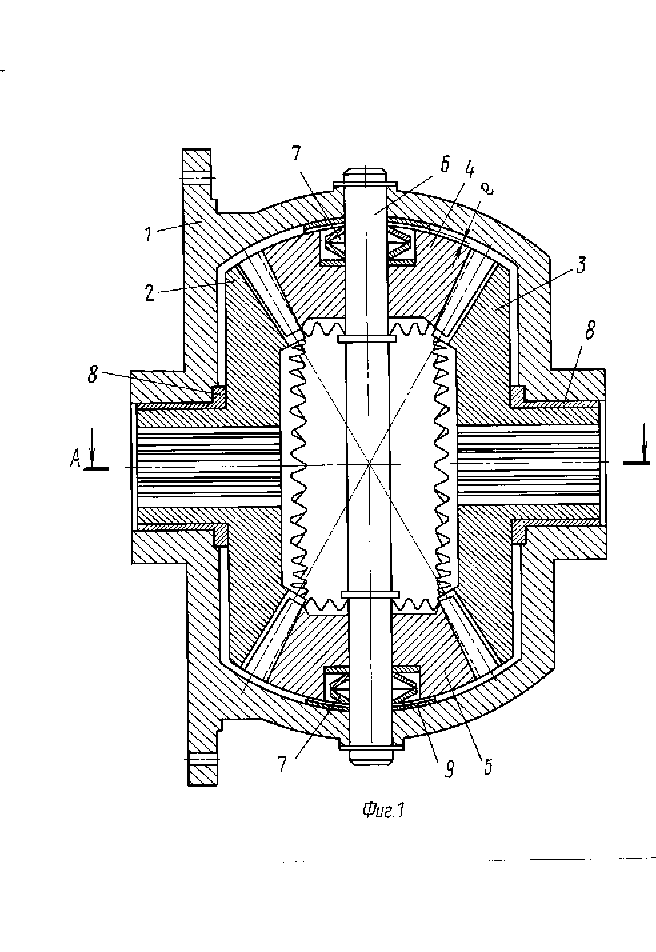
КОНИЧЕСКИЙ ДИФФЕРЕНЦИАЛ, содержащий корпус с оппозитно расположенными полуосевыми шестернями и находящиеся с ними в зацеплении сателлиты, установленные на закрепленной в корпусе оси, отличающийся тем, что геометрические оси шестерен расположены в корпусе дифференциала под углом 15 - 30' к геометрической оси вращения корпуса, а сателлиты подпружинены относительно корпуса.
